 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Composite Learning and the Nunchaku Flipping Challenge
Sep 11, 2017
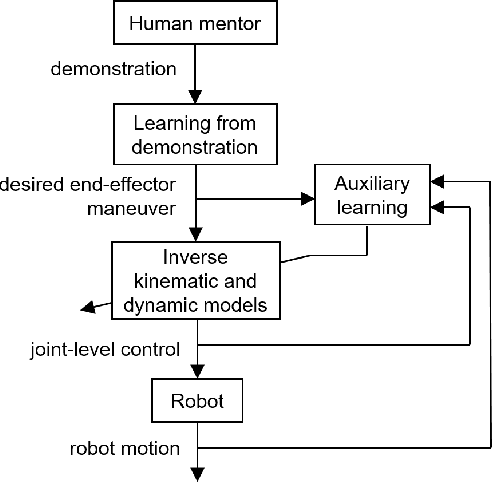
Advanced motor skills are essential for robots to physically coexist with humans. Much research on robot dynamics and control has achieved success on hyper robot motor capabilities, but mostly through heavily case-specific engineering. Meanwhile, in terms of robot acquiring skills in a ubiquitous manner, robot learning from human demonstration (LfD) has achieved great progress, but still has limitations handling dynamic skills and compound actions. In this paper, we present a composite learning scheme which goes beyond LfD and integrates robot learning from human definition, demonstration, and evaluation. The method tackles advanced motor skills that require dynamic time-critical maneuver, complex contact control, and handling partly soft partly rigid objects. We also introduce the "nunchaku flipping challenge", an extreme test that puts hard requirements to all these three aspects. Continued from our previous presentations, this paper introduces the latest update of the composite learning scheme and the physical success of the nunchaku flipping challenge.
Multiform Adaptive Robot Skill Learning from Humans
Aug 17, 2017
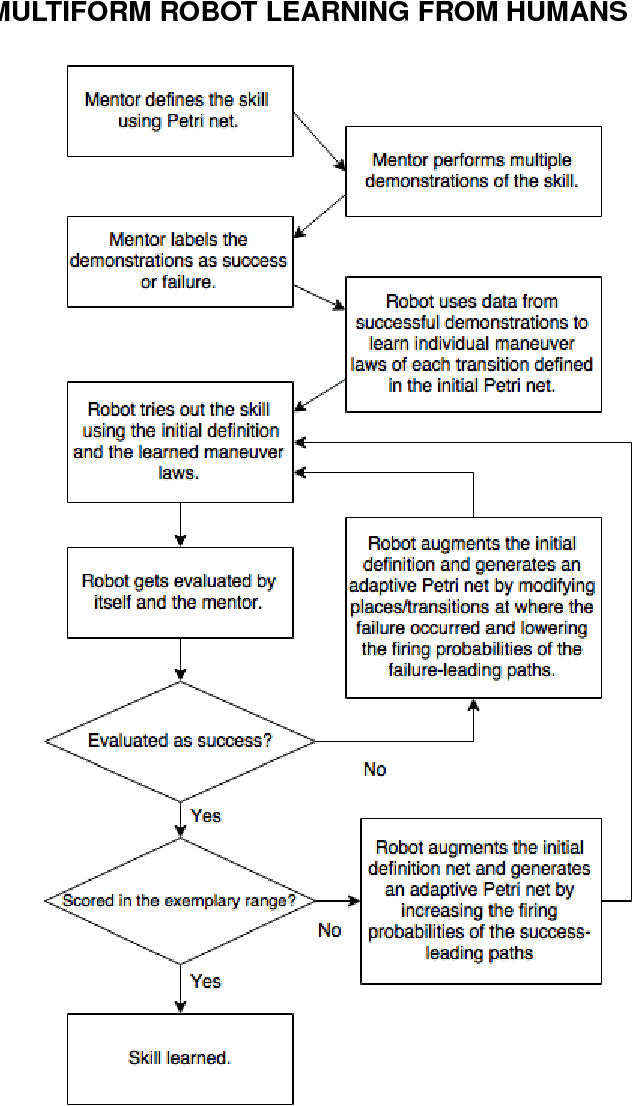
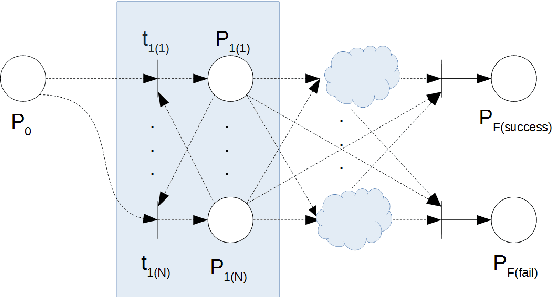
Object manipulation is a basic element in everyday human lives. Robotic manipulation has progressed from maneuvering single-rigid-body objects with firm grasping to maneuvering soft objects and handling contact-rich actions. Meanwhile, technologies such as robot learning from demonstration have enabled humans to intuitively train robots. This paper discusses a new level of robotic learning-based manipulation. In contrast to the single form of learning from demonstration, we propose a multiform learning approach that integrates additional forms of skill acquisition, including adaptive learning from definition and evaluation. Moreover, going beyond state-of-the-art technologies of handling purely rigid or soft objects in a pseudo-static manner, our work allows robots to learn to handle partly rigid partly soft objects with time-critical skills and sophisticated contact control. Such capability of robotic manipulation offers a variety of new possibilities in human-robot interaction.