 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Real-World Polyphonic Piano Audio-to-Score Transcription with Hierarchical Decoding
May 22, 2024Piano audio-to-score transcription (A2S) is an important yet underexplored task with extensive applications for music composition, practice, and analysis. However, existing end-to-end piano A2S systems faced difficulties in retrieving bar-level information such as key and time signatures, and have been trained and evaluated with only synthetic data. To address these limitations, we propose a sequence-to-sequence (Seq2Seq) model with a hierarchical decoder that aligns with the hierarchical structure of musical scores, enabling the transcription of score information at both the bar and note levels by multi-task learning. To bridge the gap between synthetic data and recordings of human performance, we propose a two-stage training scheme, which involves pre-training the model using an expressive performance rendering (EPR) system on synthetic audio, followed by fine-tuning the model using recordings of human performance. To preserve the voicing structure for score reconstruction, we propose a pre-processing method for **Kern scores in scenarios with an unconstrained number of voices. Experimental results support the effectiveness of our proposed approaches, in terms of both transcription performance on synthetic audio data in comparison to the current state-of-the-art, and the first experiment on human recordings.
Incorporating Prior Knowledge into Reinforcement Learning for Soft Tissue Manipulation with Autonomous Grasping Point Selection
Jul 21, 2022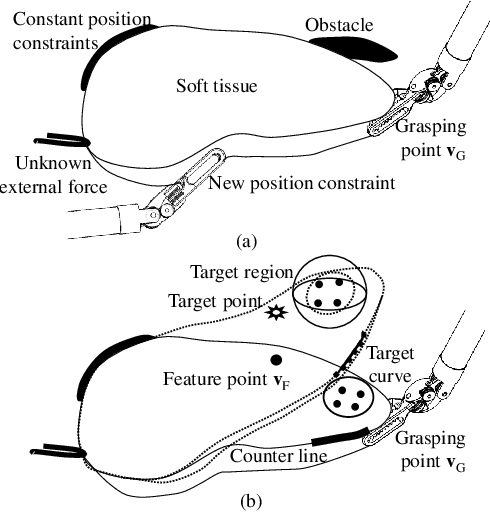
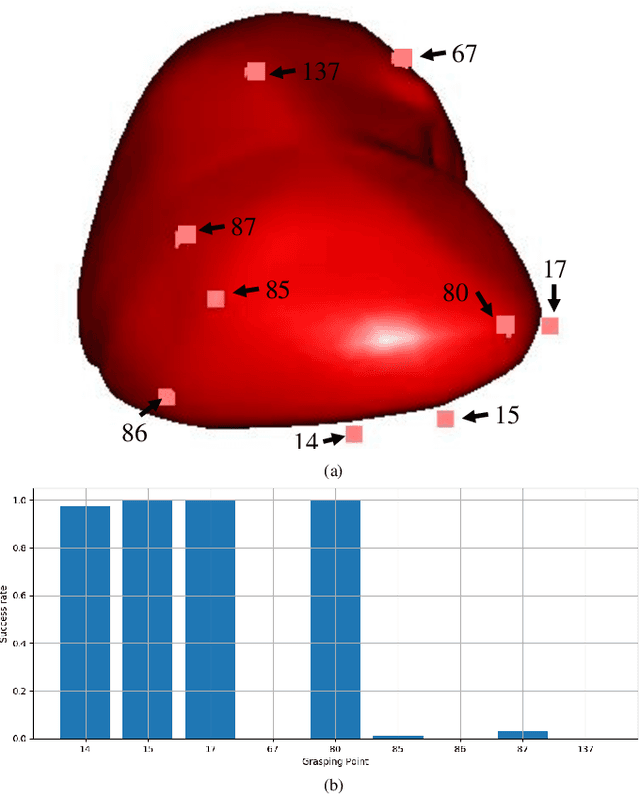
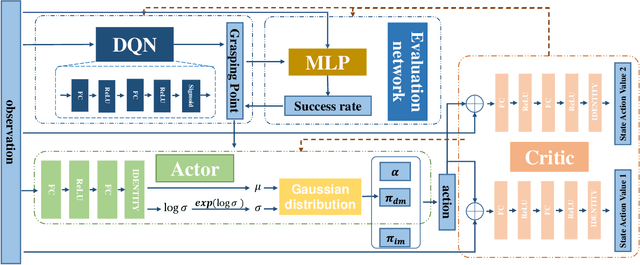
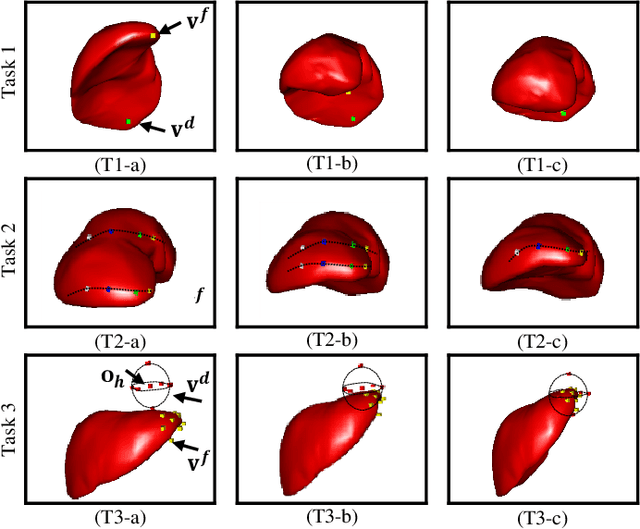
Previous soft tissue manipulation studies assumed that the grasping point was known and the target deformation can be achieved. During the operation, the constraints are supposed to be constant, and there is no obstacles around the soft tissue. To go beyond these assumptions, a deep reinforcement learning framework with prior knowledge is proposed for soft tissue manipulation under unknown constraints, such as the force applied by fascia. The prior knowledge is represented through an intuitive manipulation strategy. As an action of the agent, a regulator factor is used to coordinate the intuitive approach and the deliberate network. A reward function is designed to balance the exploration and exploitation for large deformation. Successful simulation results verify that the proposed framework can manipulate the soft tissue while avoiding obstacles and adding new position constraints. Compared with the soft actor-critic (SAC) algorithm, the proposed framework can accelerate the training procedure and improve the generalization.