 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial samples for deep monocular 6D object pose estimation
Paper and Code
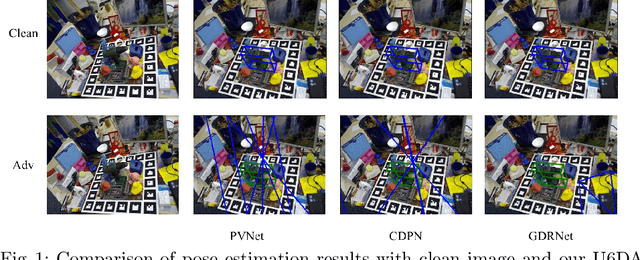
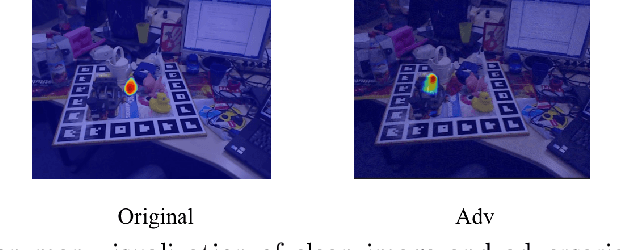

Estimating 6D object pose from an RGB image is important for many real-world applications such as autonomous driving and robotic grasping. Recent deep learning models have achieved significant progress on this task but their robustness received little research attention. In this work, for the first time, we study adversarial samples that can fool deep learning models with imperceptible perturbations to input image. In particular, we propose a Unified 6D pose estimation Attack, namely U6DA, which can successfully attack several state-of-the-art (SOTA) deep learning models for 6D pose estimation. The key idea of our U6DA is to fool the models to predict wrong results for object instance localization and shape that are essential for correct 6D pose estimation. Specifically, we explore a transfer-based black-box attack to 6D pose estimation. We design the U6DA loss to guide the generation of adversarial examples, the loss aims to shift the segmentation attention map away from its original position. We show that the generated adversarial samples are not only effective for direct 6D pose estimation models, but also are able to attack two-stage models regardless of their robust RANSAC modules. Extensive experiments were conducted to demonstrate the effectiveness, transferability, and anti-defense capability of our U6DA on large-scale public benchmarks. We also introduce a new U6DA-Linemod dataset for robustness study of the 6D pose estimation task. Our codes and dataset will be available at \url{https://github.com/cuge1995/U6DA}.