 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoSE: Skill-by-Skill Mixture-of-Expert Learning for Autonomous Driving
Jul 10, 2025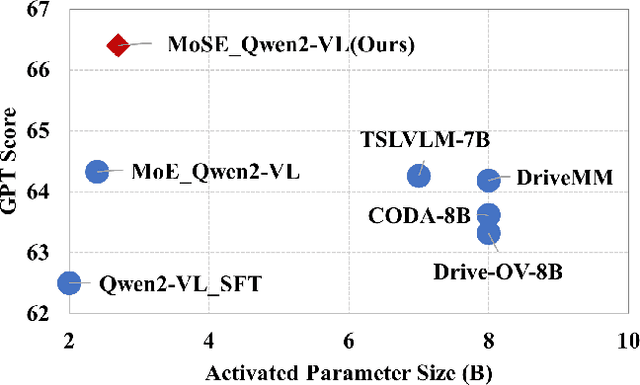
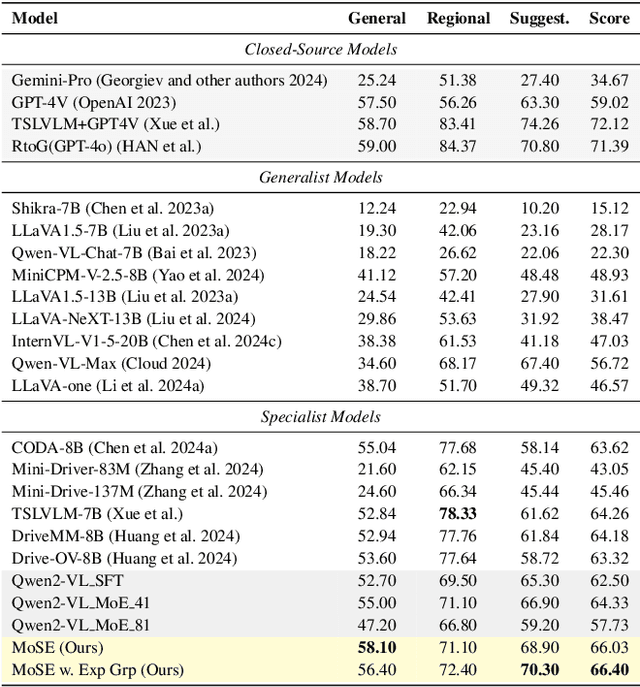
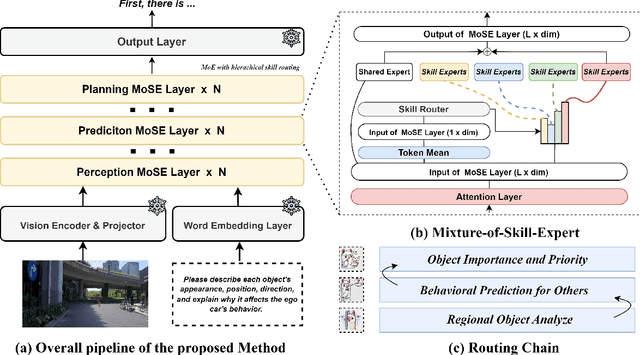
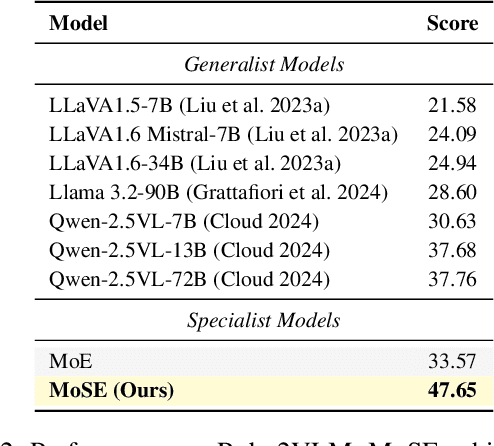
Recent studies show large language models (LLMs) and vision language models (VLMs) trained using web-scale data can empower end-to-end autonomous driving systems for a better generalization and interpretation. Specifically, by dynamically routing inputs to specialized subsets of parameters, the Mixture-of-Experts (MoE) technique enables general LLMs or VLMs to achieve substantial performance improvements while maintaining computational efficiency. However, general MoE models usually demands extensive training data and complex optimization. In this work, inspired by the learning process of human drivers, we propose a skill-oriented MoE, called MoSE, which mimics human drivers' learning process and reasoning process, skill-by-skill and step-by-step. We propose a skill-oriented routing mechanism that begins with defining and annotating specific skills, enabling experts to identify the necessary driving competencies for various scenarios and reasoning tasks, thereby facilitating skill-by-skill learning. Further align the driving process to multi-step planning in human reasoning and end-to-end driving models, we build a hierarchical skill dataset and pretrain the router to encourage the model to think step-by-step. Unlike multi-round dialogs, MoSE integrates valuable auxiliary tasks (e.g.\ description, reasoning, planning) in one single forward process without introducing any extra computational cost. With less than 3B sparsely activated parameters, our model outperforms several 8B+ parameters on CODA AD corner case reasoning task. Compared to existing methods based on open-source models and data, our approach achieves state-of-the-art performance with significantly reduced activated model size (at least by $62.5\%$) with a single-turn conversation.
Jigsaw-R1: A Study of Rule-based Visual Reinforcement Learning with Jigsaw Puzzles
May 29, 2025The application of rule-based reinforcement learning (RL) to multimodal large language models (MLLMs) introduces unique challenges and potential deviations from findings in text-only domains, particularly for perception-heavy tasks. This paper provides a comprehensive study of rule-based visual RL using jigsaw puzzles as a structured experimental framework, revealing several key findings. \textit{Firstly,} we find that MLLMs, initially performing near to random guessing on simple puzzles, achieve near-perfect accuracy and generalize to complex, unseen configurations through fine-tuning. \textit{Secondly,} training on jigsaw puzzles can induce generalization to other visual tasks, with effectiveness tied to specific task configurations. \textit{Thirdly,} MLLMs can learn and generalize with or without explicit reasoning, though open-source models often favor direct answering. Consequently, even when trained for step-by-step reasoning, they can ignore the thinking process in deriving the final answer. \textit{Fourthly,} we observe that complex reasoning patterns appear to be pre-existing rather than emergent, with their frequency increasing alongside training and task difficulty. \textit{Finally,} our results demonstrate that RL exhibits more effective generalization than Supervised Fine-Tuning (SFT), and an initial SFT cold start phase can hinder subsequent RL optimization. Although these observations are based on jigsaw puzzles and may vary across other visual tasks, this research contributes a valuable piece of jigsaw to the larger puzzle of collective understanding rule-based visual RL and its potential in multimodal learning. The code is available at: \href{https://github.com/zifuwanggg/Jigsaw-R1}{https://github.com/zifuwanggg/Jigsaw-R1}.
BLADE: Benchmarking Language Model Agents for Data-Driven Science
Aug 20, 2024Data-driven scientific discovery requires the iterative integration of scientific domain knowledge, statistical expertise, and an understanding of data semantics to make nuanced analytical decisions, e.g., about which variables, transformations, and statistical models to consider. LM-based agents equipped with planning, memory, and code execution capabilities have the potential to support data-driven science. However, evaluating agents on such open-ended tasks is challenging due to multiple valid approaches, partially correct steps, and different ways to express the same decisions. To address these challenges, we present BLADE, a benchmark to automatically evaluate agents' multifaceted approaches to open-ended research questions. BLADE consists of 12 datasets and research questions drawn from existing scientific literature, with ground truth collected from independent analyses by expert data scientists and researchers. To automatically evaluate agent responses, we developed corresponding computational methods to match different representations of analyses to this ground truth. Though language models possess considerable world knowledge, our evaluation shows that they are often limited to basic analyses. However, agents capable of interacting with the underlying data demonstrate improved, but still non-optimal, diversity in their analytical decision making. Our work enables the evaluation of agents for data-driven science and provides researchers deeper insights into agents' analysis approaches.
HIMap: HybrId Representation Learning for End-to-end Vectorized HD Map Construction
Mar 26, 2024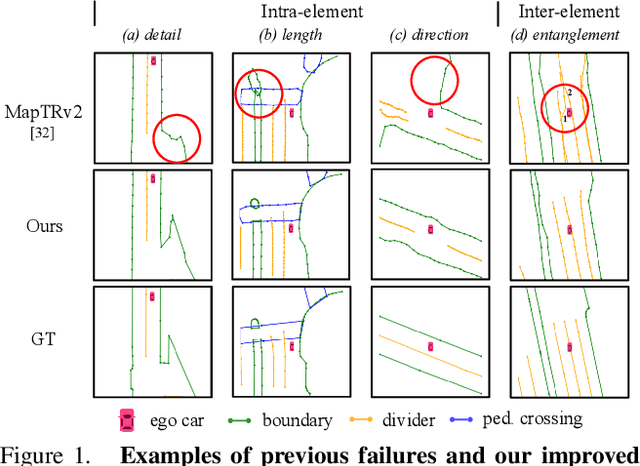
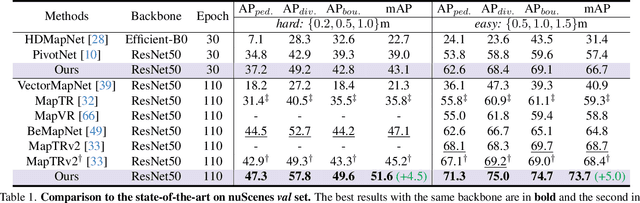

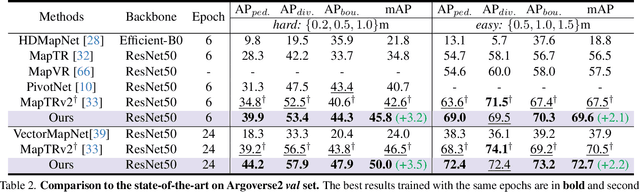
Vectorized High-Definition (HD) map construction requires predictions of the category and point coordinates of map elements (e.g. road boundary, lane divider, pedestrian crossing, etc.). State-of-the-art methods are mainly based on point-level representation learning for regressing accurate point coordinates. However, this pipeline has limitations in obtaining element-level information and handling element-level failures, e.g. erroneous element shape or entanglement between elements. To tackle the above issues, we propose a simple yet effective HybrId framework named HIMap to sufficiently learn and interact both point-level and element-level information. Concretely, we introduce a hybrid representation called HIQuery to represent all map elements, and propose a point-element interactor to interactively extract and encode the hybrid information of elements, e.g. point position and element shape, into the HIQuery. Additionally, we present a point-element consistency constraint to enhance the consistency between the point-level and element-level information. Finally, the output point-element integrated HIQuery can be directly converted into map elements' class, point coordinates, and mask. We conduct extensive experiments and consistently outperform previous methods on both nuScenes and Argoverse2 datasets. Notably, our method achieves $77.8$ mAP on the nuScenes dataset, remarkably superior to previous SOTAs by $8.3$ mAP at least.
Revisiting Evaluation Metrics for Semantic Segmentation: Optimization and Evaluation of Fine-grained Intersection over Union
Oct 30, 2023Semantic segmentation datasets often exhibit two types of imbalance: \textit{class imbalance}, where some classes appear more frequently than others and \textit{size imbalance}, where some objects occupy more pixels than others. This causes traditional evaluation metrics to be biased towards \textit{majority classes} (e.g. overall pixel-wise accuracy) and \textit{large objects} (e.g. mean pixel-wise accuracy and per-dataset mean intersection over union). To address these shortcomings, we propose the use of fine-grained mIoUs along with corresponding worst-case metrics, thereby offering a more holistic evaluation of segmentation techniques. These fine-grained metrics offer less bias towards large objects, richer statistical information, and valuable insights into model and dataset auditing. Furthermore, we undertake an extensive benchmark study, where we train and evaluate 15 modern neural networks with the proposed metrics on 12 diverse natural and aerial segmentation datasets. Our benchmark study highlights the necessity of not basing evaluations on a single metric and confirms that fine-grained mIoUs reduce the bias towards large objects. Moreover, we identify the crucial role played by architecture designs and loss functions, which lead to best practices in optimizing fine-grained metrics. The code is available at \href{https://github.com/zifuwanggg/JDTLosses}{https://github.com/zifuwanggg/JDTLosses}.
Yes, IoU loss is submodular - as a function of the mispredictions
Sep 06, 2018This note is a response to [7] in which it is claimed that [13, Proposition 11] is false. We demonstrate here that this assertion in [7] is false, and is based on a misreading of the notion of set membership in [13, Proposition 11]. We maintain that [13, Proposition 11] is true. ([7] = arXiv:1809.00593, [13] = arXiv:1512.07797)
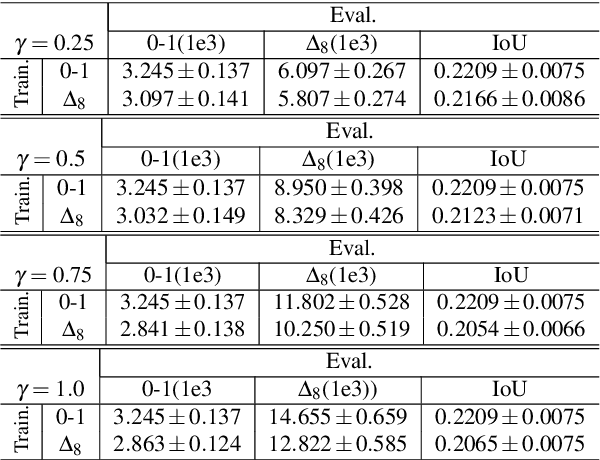
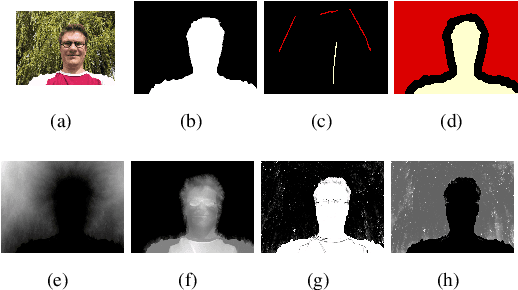
The Lovász Hinge: A Novel Convex Surrogate for Submodular Losses
May 15, 2017



Learning with non-modular losses is an important problem when sets of predictions are made simultaneously. The main tools for constructing convex surrogate loss functions for set prediction are margin rescaling and slack rescaling. In this work, we show that these strategies lead to tight convex surrogates iff the underlying loss function is increasing in the number of incorrect predictions. However, gradient or cutting-plane computation for these functions is NP-hard for non-supermodular loss functions. We propose instead a novel surrogate loss function for submodular losses, the Lov\'asz hinge, which leads to O(p log p) complexity with O(p) oracle accesses to the loss function to compute a gradient or cutting-plane. We prove that the Lov\'asz hinge is convex and yields an extension. As a result, we have developed the first tractable convex surrogates in the literature for submodular losses. We demonstrate the utility of this novel convex surrogate through several set prediction tasks, including on the PASCAL VOC and Microsoft COCO datasets.
An Efficient Decomposition Framework for Discriminative Segmentation with Supermodular Losses
Feb 13, 2017

Several supermodular losses have been shown to improve the perceptual quality of image segmentation in a discriminative framework such as a structured output support vector machine (SVM). These loss functions do not necessarily have the same structure as the one used by the segmentation inference algorithm, and in general, we may have to resort to generic submodular minimization algorithms for loss augmented inference. Although these come with polynomial time guarantees, they are not practical to apply to image scale data. Many supermodular losses come with strong optimization guarantees, but are not readily incorporated in a loss augmented graph cuts procedure. This motivates our strategy of employing the alternating direction method of multipliers (ADMM) decomposition for loss augmented inference. In doing so, we create a new API for the structured SVM that separates the maximum a posteriori (MAP) inference of the model from the loss augmentation during training. In this way, we gain computational efficiency, making new choices of loss functions practical for the first time, while simultaneously making the inference algorithm employed during training closer to the test time procedure. We show improvement both in accuracy and computational performance on the Microsoft Research Grabcut database and a brain structure segmentation task, empirically validating the use of several supermodular loss functions during training, and the improved computational properties of the proposed ADMM approach over the Fujishige-Wolfe minimum norm point algorithm.
A Convex Surrogate Operator for General Non-Modular Loss Functions
Apr 12, 2016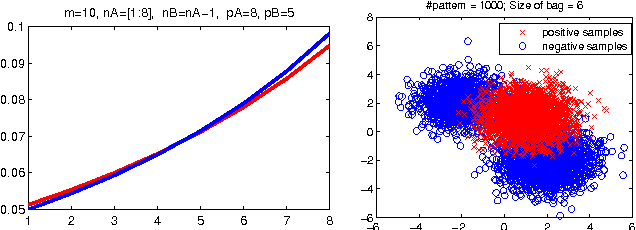



Empirical risk minimization frequently employs convex surrogates to underlying discrete loss functions in order to achieve computational tractability during optimization. However, classical convex surrogates can only tightly bound modular loss functions, sub-modular functions or supermodular functions separately while maintaining polynomial time computation. In this work, a novel generic convex surrogate for general non-modular loss functions is introduced, which provides for the first time a tractable solution for loss functions that are neither super-modular nor submodular. This convex surro-gate is based on a submodular-supermodular decomposition for which the existence and uniqueness is proven in this paper. It takes the sum of two convex surrogates that separately bound the supermodular component and the submodular component using slack-rescaling and the Lov{\'a}sz hinge, respectively. It is further proven that this surrogate is convex , piecewise linear, an extension of the loss function, and for which subgradient computation is polynomial time. Empirical results are reported on a non-submodular loss based on the S{{\o}}rensen-Dice difference function, and a real-world face track dataset with tens of thousands of frames, demonstrating the improved performance, efficiency, and scalabil-ity of the novel convex surrogate.