 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Time-Informed Kinodynamic Motion Planning of Nonlinear Systems
Jul 03, 2024



Sampling-based kinodynamic motion planners (SKMPs) are powerful in finding collision-free trajectories for high-dimensional systems under differential constraints. Time-informed set (TIS) can provide the heuristic search domain to accelerate their convergence to the time-optimal solution. However, existing TIS approximation methods suffer from the curse of dimensionality, computational burden, and limited system applicable scope, e.g., linear and polynomial nonlinear systems. To overcome these problems, we propose a method by leveraging deep learning technology, Koopman operator theory, and random set theory. Specifically, we propose a Deep Invertible Koopman operator with control U model named DIKU to predict states forward and backward over a long horizon by modifying the auxiliary network with an invertible neural network. A sampling-based approach, ASKU, performing reachability analysis for the DIKU is developed to approximate the TIS of nonlinear control systems online. Furthermore, we design an online time-informed SKMP using a direct sampling technique to draw uniform random samples in the TIS. Simulation experiment results demonstrate that our method outperforms other existing works, approximating TIS in near real-time and achieving superior planning performance in several time-optimal kinodynamic motion planning problems.
Enhance Connectivity of Promising Regions for Sampling-based Path Planning
Dec 15, 2021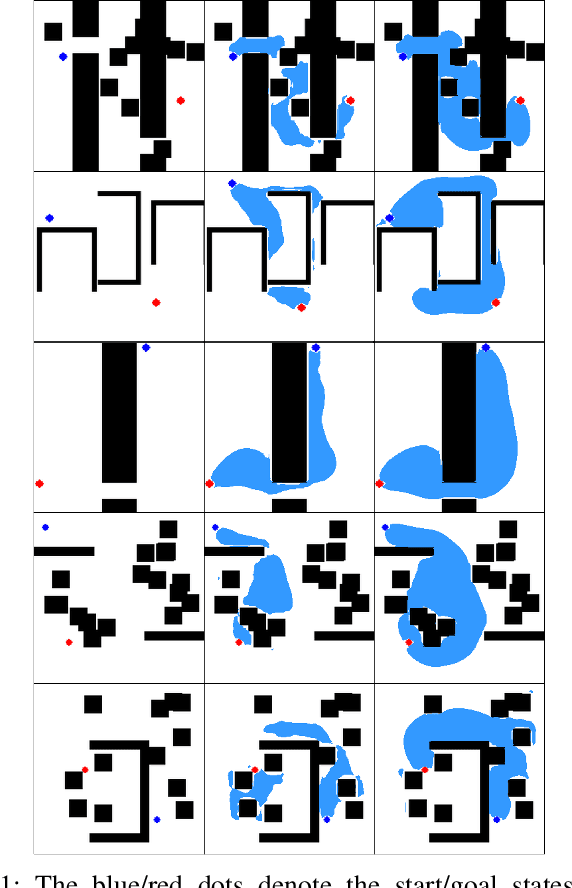
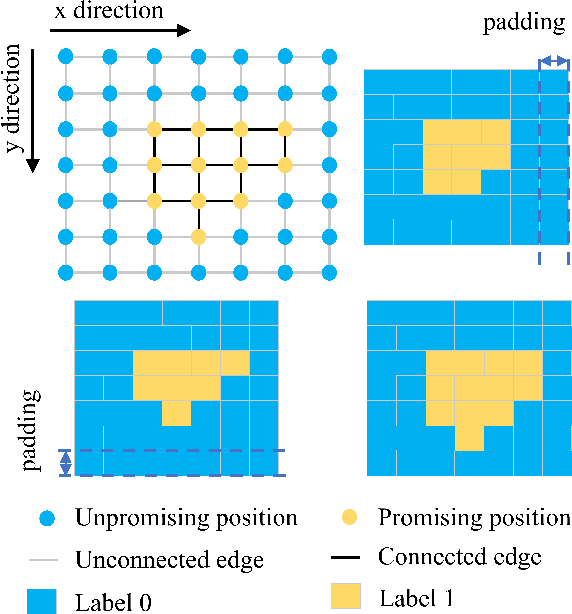
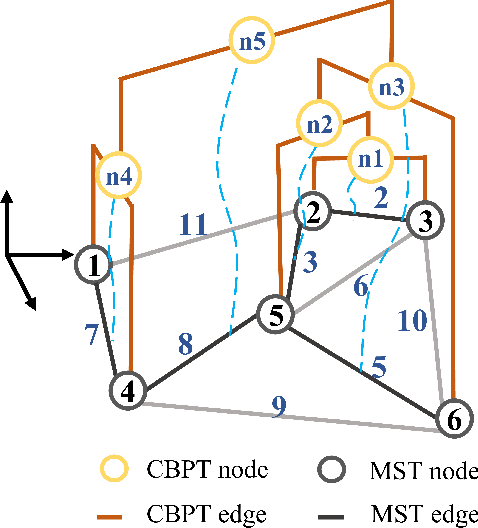
Sampling-based path planning algorithms usually implement uniform sampling methods to search the state space. However, uniform sampling may lead to unnecessary exploration in many scenarios, such as the environment with a few dead ends. Our previous work proposes to use the promising region to guide the sampling process to address the issue. However, the predicted promising regions are often disconnected, which means they cannot connect the start and goal state, resulting in a lack of probabilistic completeness. This work focuses on enhancing the connectivity of predicted promising regions. Our proposed method regresses the connectivity probability of the edges in the x and y directions. In addition, it calculates the weight of the promising edges in loss to guide the neural network to pay more attention to the connectivity of the promising regions. We conduct a series of simulation experiments, and the results show that the connectivity of promising regions improves significantly. Furthermore, we analyze the effect of connectivity on sampling-based path planning algorithms and conclude that connectivity plays an essential role in maintaining algorithm performance.
RASEC: Rescaling Acquisition Strategy with Energy Constraints under SE-OU Fusion Kernel for Active Trachea Palpation and Incision Recommendation in Laryngeal Region
Nov 12, 2021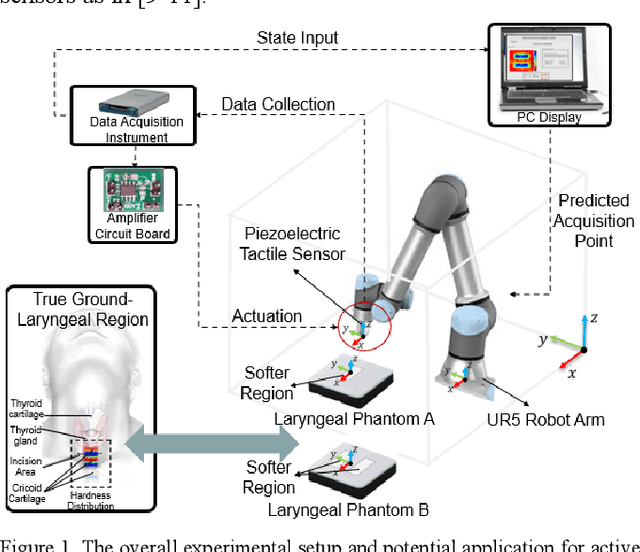
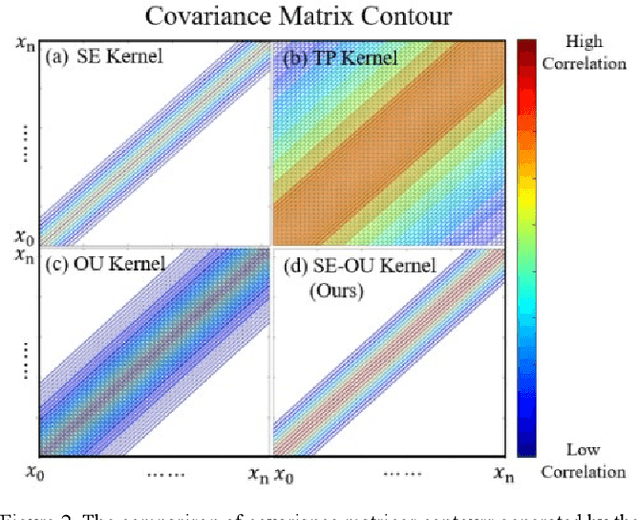
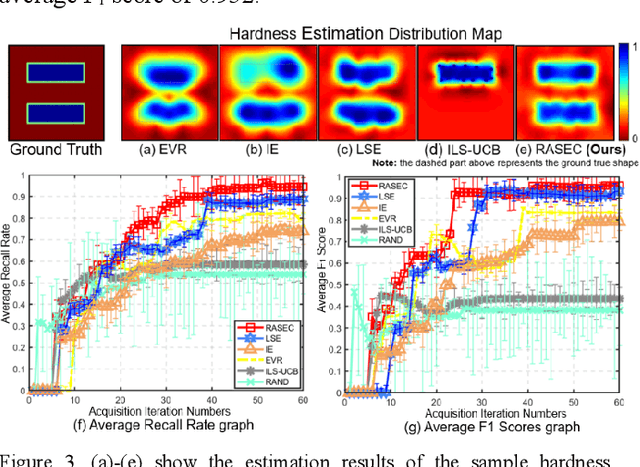
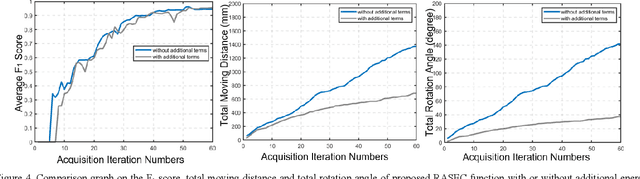
A novel palpation-based incision detection strategy in the laryngeal region, potentially for robotic tracheotomy, is proposed in this letter. A tactile sensor is introduced to measure tissue hardness in the specific laryngeal region by gentle contact. The kernel fusion method is proposed to combine the Squared Exponential (SE) kernel with Ornstein-Uhlenbeck (OU) kernel to figure out the drawbacks that the existing kernel functions are not sufficiently optimal in this scenario. Moreover, we further regularize exploration factor and greed factor, and the tactile sensor's moving distance and the robotic base link's rotation angle during the incision localization process are considered as new factors in the acquisition strategy. We conducted simulation and physical experiments to compare the newly proposed algorithm - Rescaling Acquisition Strategy with Energy Constraints (RASEC) in trachea detection with current palpation-based acquisition strategies. The result indicates that the proposed acquisition strategy with fusion kernel can successfully localize the incision with the highest algorithm performance (Average Precision 0.932, Average Recall 0.973, Average F1 score 0.952). During the robotic palpation process, the cumulative moving distance is reduced by 50%, and the cumulative rotation angle is reduced by 71.4% with no sacrifice in the comprehensive performance capabilities. Therefore, it proves that RASEC can efficiently suggest the incision zone in the laryngeal region and greatly reduced the energy loss.
A Survey on Deep-Learning Approaches for Vehicle Trajectory Prediction in Autonomous Driving
Oct 29, 2021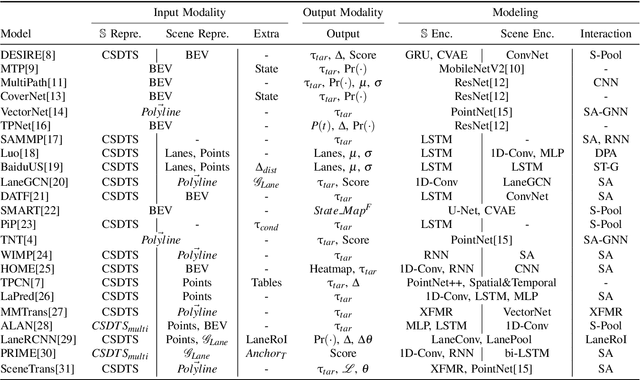
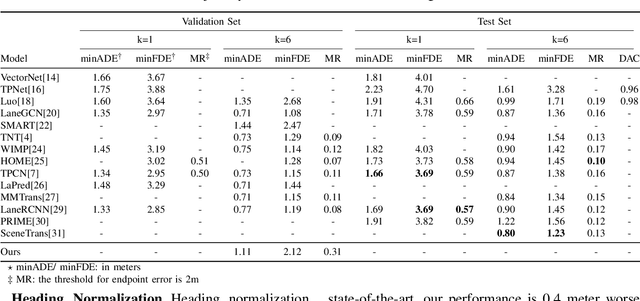
With the rapid development of machine learning, autonomous driving has become a hot issue, making urgent demands for more intelligent perception and planning systems. Self-driving cars can avoid traffic crashes with precisely predicted future trajectories of surrounding vehicles. In this work, we review and categorize existing learning-based trajectory forecasting methods from perspectives of representation, modeling, and learning. Moreover, we make our implementation of Target-driveN Trajectory Prediction publicly available at https://github.com/Henry1iu/TNT-Trajectory-Predition, demonstrating its outstanding performance whereas its original codes are withheld. Enlightenment is expected for researchers seeking to improve trajectory prediction performance based on the achievement we have made.
Learning-based Fast Path Planning in Complex Environments
Oct 19, 2021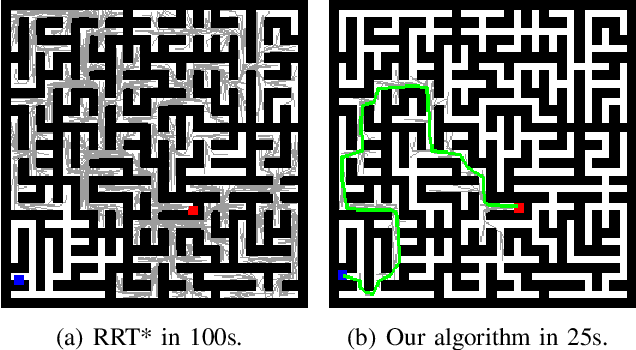
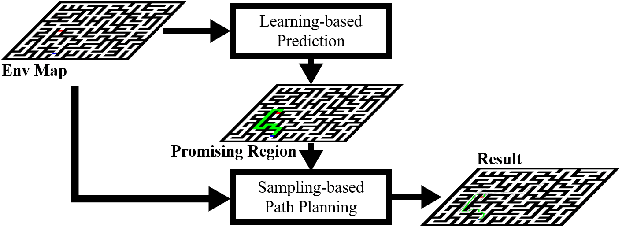
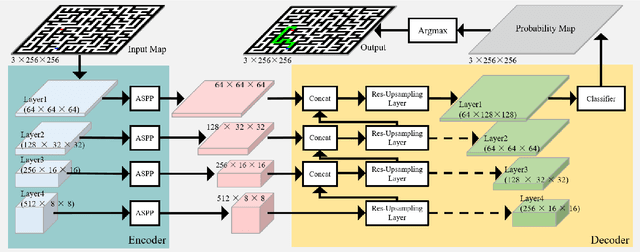
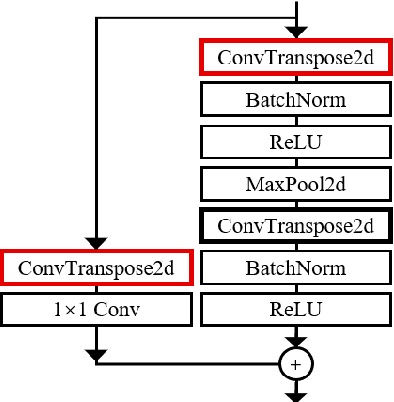
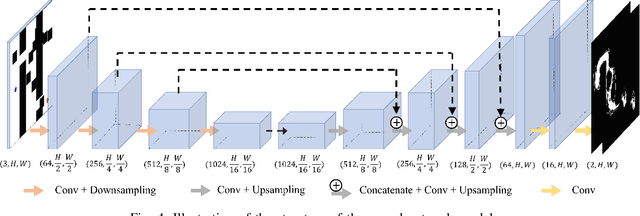
In this paper, we present a novel path planning algorithm to achieve fast path planning in complex environments. Most existing path planning algorithms are difficult to quickly find a feasible path in complex environments or even fail. However, our proposed framework can overcome this difficulty by using a learning-based prediction module and a sampling-based path planning module. The prediction module utilizes an auto-encoder-decoder-like convolutional neural network (CNN) to output a promising region where the feasible path probably lies in. In this process, the environment is treated as an RGB image to feed in our designed CNN module, and the output is also an RGB image. No extra computation is required so that we can maintain a high processing speed of 60 frames-per-second (FPS). Incorporated with a sampling-based path planner, we can extract a feasible path from the output image so that the robot can track it from start to goal. To demonstrate the advantage of the proposed algorithm, we compare it with conventional path planning algorithms in a series of simulation experiments. The results reveal that the proposed algorithm can achieve much better performance in terms of planning time, success rate, and path length.
Hierarchical Policy for Non-prehensile Multi-object Rearrangement with Deep Reinforcement Learning and Monte Carlo Tree Search
Sep 18, 2021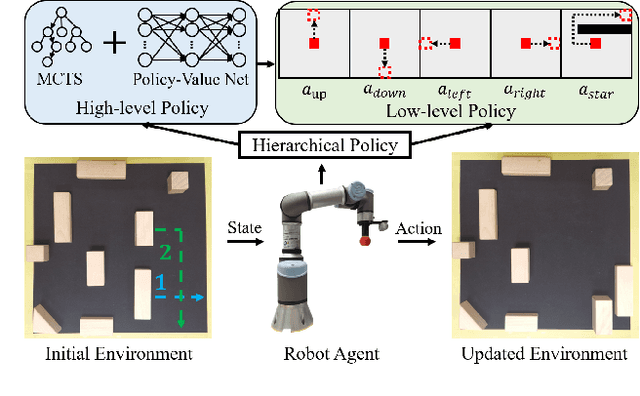
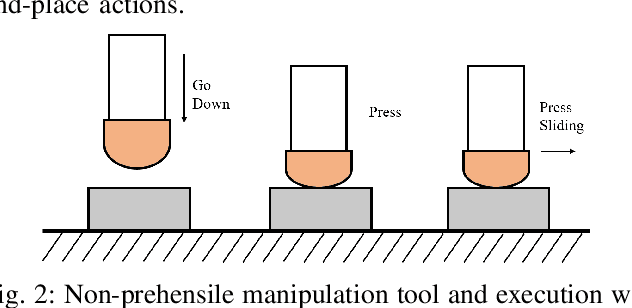
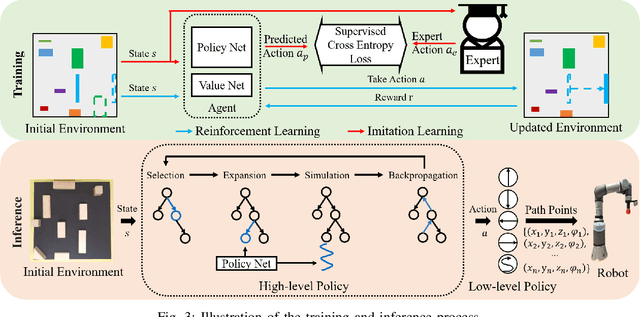

Non-prehensile multi-object rearrangement is a robotic task of planning feasible paths and transferring multiple objects to their predefined target poses without grasping. It needs to consider how each object reaches the target and the order of object movement, which significantly deepens the complexity of the problem. To address these challenges, we propose a hierarchical policy to divide and conquer for non-prehensile multi-object rearrangement. In the high-level policy, guided by a designed policy network, the Monte Carlo Tree Search efficiently searches for the optimal rearrangement sequence among multiple objects, which benefits from imitation and reinforcement. In the low-level policy, the robot plans the paths according to the order of path primitives and manipulates the objects to approach the goal poses one by one. We verify through experiments that the proposed method can achieve a higher success rate, fewer steps, and shorter path length compared with the state-of-the-art.
A Large-Scale Dataset for Benchmarking Elevator Button Segmentation and Character Recognition
Mar 22, 2021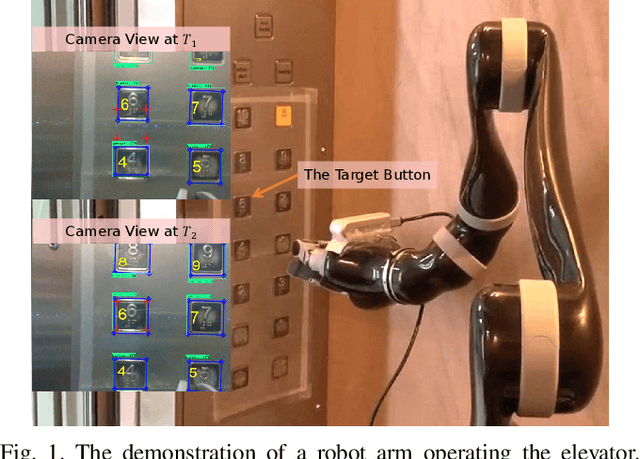
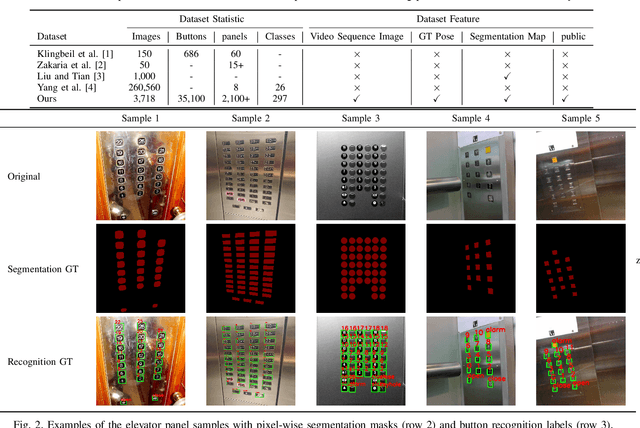
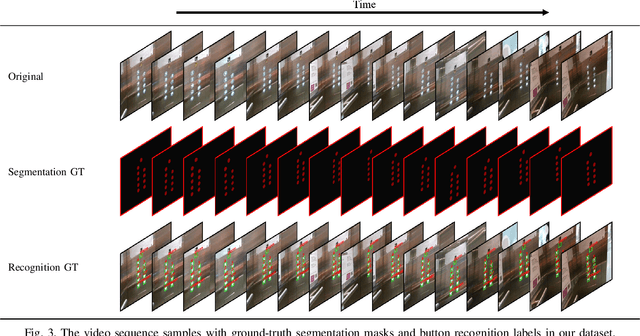
Human activities are hugely restricted by COVID-19, recently. Robots that can conduct inter-floor navigation attract much public attention, since they can substitute human workers to conduct the service work. However, current robots either depend on human assistance or elevator retrofitting, and fully autonomous inter-floor navigation is still not available. As the very first step of inter-floor navigation, elevator button segmentation and recognition hold an important position. Therefore, we release the first large-scale publicly available elevator panel dataset in this work, containing 3,718 panel images with 35,100 button labels, to facilitate more powerful algorithms on autonomous elevator operation. Together with the dataset, a number of deep learning based implementations for button segmentation and recognition are also released to benchmark future methods in the community. The dataset will be available at \url{https://github.com/zhudelong/elevator_button_recognition
Search-Based Online Trajectory Planning for Car-like Robots in Highly Dynamic Environments
Nov 07, 2020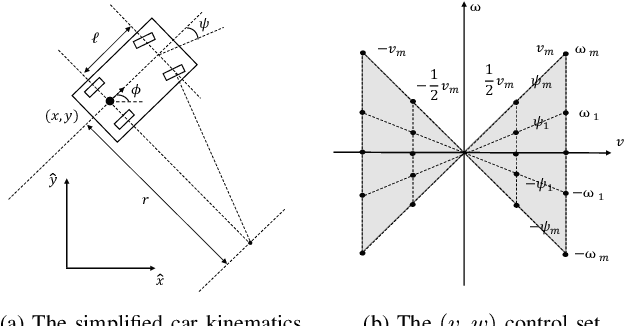

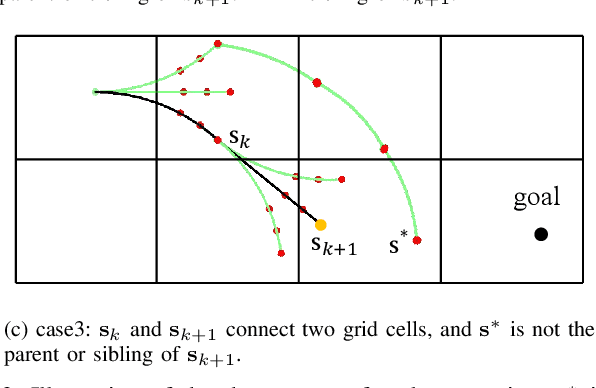
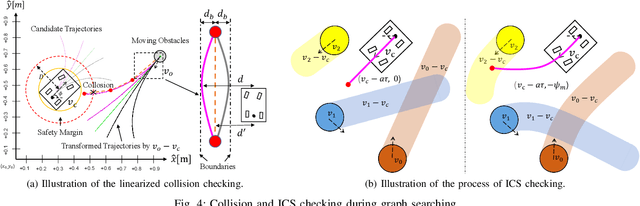
This paper presents a search-based partial motion planner to generate dynamically feasible trajectories for car-like robots in highly dynamic environments. The planner searches for smooth, safe, and near-time-optimal trajectories by exploring a state graph built on motion primitives, which are generated by discretizing the time dimension and the control space. To enable fast online planning, we first propose an efficient path searching algorithm based on the aggregation and pruning of motion primitives. We then propose a fast collision checking algorithm that takes into account the motions of moving obstacles. The algorithm linearizes relative motions between the robot and obstacles and then checks collisions by comparing a point-line distance. Benefiting from the fast searching and collision checking algorithms, the planner can effectively and safely explore the state-time space to generate near-time-optimal solutions. The results through extensive experiments show that the proposed method can generate feasible trajectories within milliseconds while maintaining a higher success rate than up-to-date methods, which significantly demonstrates its advantages.
Autonomous Removal of Perspective Distortion for Robotic Elevator Button Recognition
Dec 26, 2019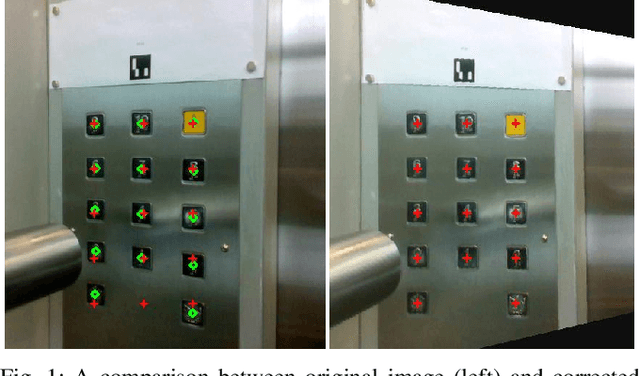

Elevator button recognition is considered an indispensable function for enabling the autonomous elevator operation of mobile robots. However, due to unfavorable image conditions and various image distortions, the recognition accuracy remains to be improved. In this paper, we present a novel algorithm that can autonomously correct perspective distortions of elevator panel images. The algorithm first leverages the Gaussian Mixture Model (GMM) to conduct a grid fitting process based on button recognition results, then utilizes the estimated grid centers as reference features to estimate camera motions for correcting perspective distortions. The algorithm performs on a single image autonomously and does not need explicit feature detection or feature matching procedure, which is much more robust to noises and outliers than traditional feature-based geometric approaches. To verify the effectiveness of the algorithm, we collect an elevator panel dataset of 50 images captured from different angles of view. Experimental results show that the proposed algorithm can accurately estimate camera motions and effectively remove perspective distortions.