 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Deep Research Agents Find and Organize? Evaluating the Synthesis Gap with Expert Taxonomies
Jan 18, 2026Deep Research Agents are increasingly used for automated survey generation. However, whether they can write surveys like human experts remains unclear. Existing benchmarks focus on fluency or citation accuracy, but none evaluates the core capabilities: retrieving essential papers and organizing them into coherent knowledge structures. We introduce TaxoBench, a diagnostic benchmark derived from 72 highly-cited computer science surveys. We manually extract expert-authored taxonomy trees containing 3,815 precisely categorized citations as ground truth. Our benchmark supports two evaluation modes: Deep Research mode tests end-to-end retrieval and organization given only a topic, while Bottom-Up mode isolates structuring capability by providing the exact papers human experts used. We evaluate 7 leading Deep Research agents and 12 frontier LLMs. Results reveal a dual bottleneck: the best agent recalls only 20.9% of expert-selected papers, and even with perfect input, the best model achieves only 0.31 ARI in organization. Current deep research agents remain far from expert-level survey writing. Our benchmark is publicly available at https://github.com/KongLongGeFDU/TaxoBench.
Search-Based Online Trajectory Planning for Car-like Robots in Highly Dynamic Environments
Nov 07, 2020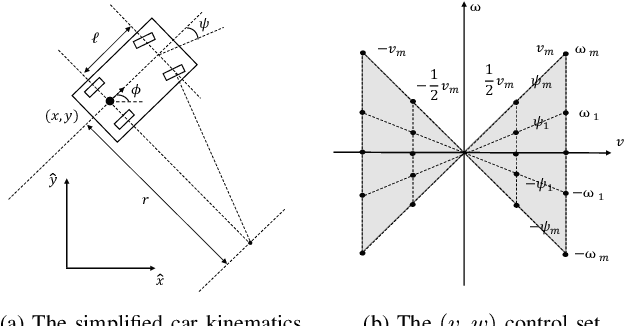

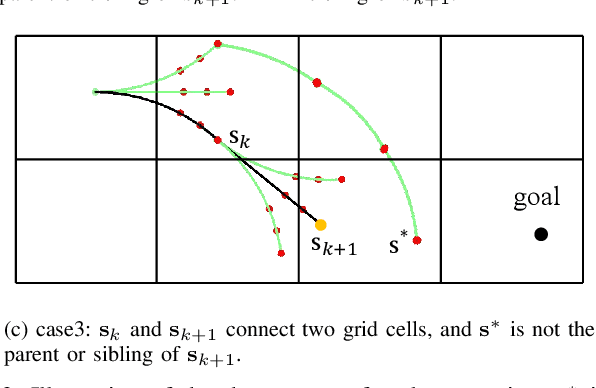
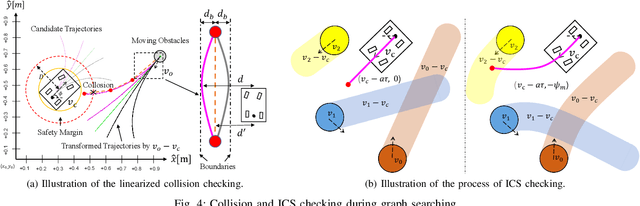
This paper presents a search-based partial motion planner to generate dynamically feasible trajectories for car-like robots in highly dynamic environments. The planner searches for smooth, safe, and near-time-optimal trajectories by exploring a state graph built on motion primitives, which are generated by discretizing the time dimension and the control space. To enable fast online planning, we first propose an efficient path searching algorithm based on the aggregation and pruning of motion primitives. We then propose a fast collision checking algorithm that takes into account the motions of moving obstacles. The algorithm linearizes relative motions between the robot and obstacles and then checks collisions by comparing a point-line distance. Benefiting from the fast searching and collision checking algorithms, the planner can effectively and safely explore the state-time space to generate near-time-optimal solutions. The results through extensive experiments show that the proposed method can generate feasible trajectories within milliseconds while maintaining a higher success rate than up-to-date methods, which significantly demonstrates its advantages.
Online State-Time Trajectory Planning Using Timed-ESDF in Highly Dynamic Environments
Oct 29, 2020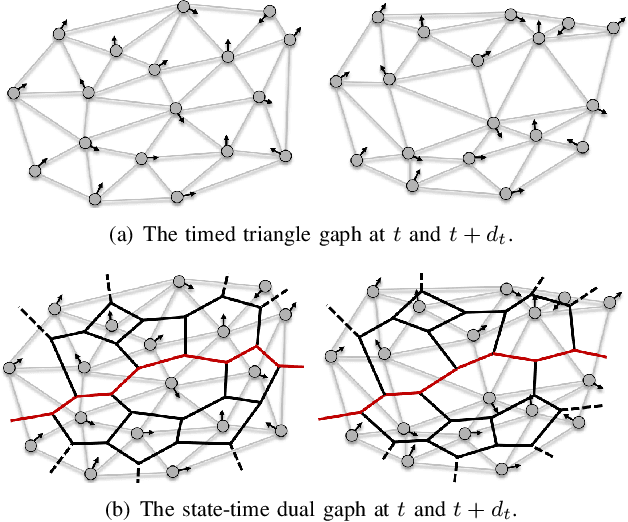
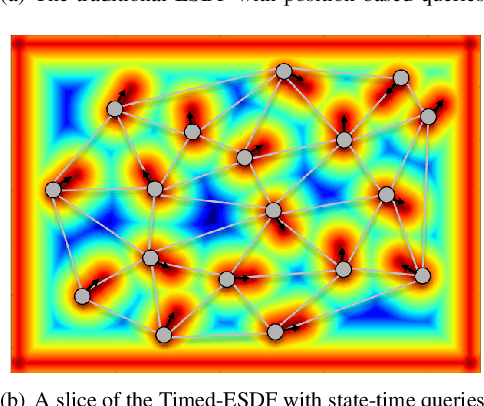
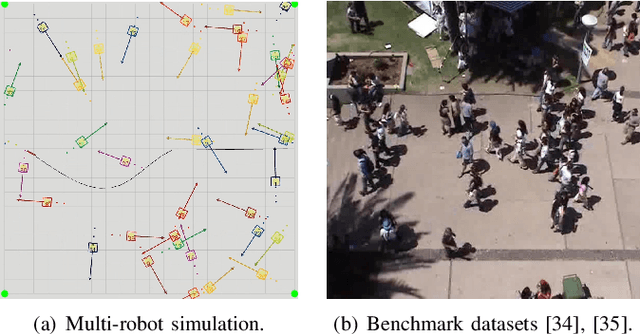

Online state-time trajectory planning in highly dynamic environments remains an unsolved problem due to the unpredictable motions of moving obstacles and the curse of dimensionality from the state-time space. Existing state-time planners are typically implemented based on randomized sampling approaches or path searching on discretized state graph. The smoothness, path clearance, and planning efficiency of these planners are usually not satisfying. In this work, we propose a gradient-based planner over the state-time space for online trajectory generation in highly dynamic environments. To enable the gradient-based optimization, we propose a Timed-ESDT that supports distance and gradient queries with state-time keys. Based on the Timed-ESDT, we also define a smooth prior and an obstacle likelihood function that is compatible with the state-time space. The trajectory planning is then formulated to a MAP problem and solved by an efficient numerical optimizer. Moreover, to improve the optimality of the planner, we also define a state-time graph and then conduct path searching on it to find a better initialization for the optimizer. By integrating the graph searching, the planning quality is significantly improved. Experiment results on simulated and benchmark datasets show that our planner can outperform the state-of-the-art methods, demonstrating its significant advantages over the traditional ones.