 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmpowering Reliable Visual-Centric Instruction Following in MLLMs
Jan 06, 2026Evaluating the instruction-following (IF) capabilities of Multimodal Large Language Models (MLLMs) is essential for rigorously assessing how faithfully model outputs adhere to user-specified intentions. Nevertheless, existing benchmarks for evaluating MLLMs' instruction-following capability primarily focus on verbal instructions in the textual modality. These limitations hinder a thorough analysis of instruction-following capabilities, as they overlook the implicit constraints embedded in the semantically rich visual modality. To address this gap, we introduce VC-IFEval, a new benchmark accompanied by a systematically constructed dataset that evaluates MLLMs' instruction-following ability under multimodal settings. Our benchmark systematically incorporates vision-dependent constraints into instruction design, enabling a more rigorous and fine-grained assessment of how well MLLMs align their outputs with both visual input and textual instructions. Furthermore, by fine-tuning MLLMs on our dataset, we achieve substantial gains in visual instruction-following accuracy and adherence. Through extensive evaluation across representative MLLMs, we provide new insights into the strengths and limitations of current models.
Reasoning Path Divergence: A New Metric and Curation Strategy to Unlock LLM Diverse Thinking
Oct 30, 2025While Test-Time Scaling (TTS) has proven effective in improving the reasoning ability of large language models (LLMs), low diversity in model outputs often becomes a bottleneck; this is partly caused by the common "one problem, one solution" (1P1S) training practice, which provides a single canonical answer and can push models toward a narrow set of reasoning paths. To address this, we propose a "one problem, multiple solutions" (1PNS) training paradigm that exposes the model to a variety of valid reasoning trajectories and thus increases inference diversity. A core challenge for 1PNS is reliably measuring semantic differences between multi-step chains of thought, so we introduce Reasoning Path Divergence (RPD), a step-level metric that aligns and scores Long Chain-of-Thought solutions to capture differences in intermediate reasoning. Using RPD, we curate maximally diverse solution sets per problem and fine-tune Qwen3-4B-Base. Experiments show that RPD-selected training yields more varied outputs and higher pass@k, with an average +2.80% gain in pass@16 over a strong 1P1S baseline and a +4.99% gain on AIME24, demonstrating that 1PNS further amplifies the effectiveness of TTS. Our code is available at https://github.com/fengjujf/Reasoning-Path-Divergence .
Text-to-CadQuery: A New Paradigm for CAD Generation with Scalable Large Model Capabilities
May 10, 2025



Computer-aided design (CAD) is fundamental to modern engineering and manufacturing, but creating CAD models still requires expert knowledge and specialized software. Recent advances in large language models (LLMs) open up the possibility of generative CAD, where natural language is directly translated into parametric 3D models. However, most existing methods generate task-specific command sequences that pretrained models cannot directly handle. These sequences must be converted into CAD representations such as CAD vectors before a 3D model can be produced, which requires training models from scratch and adds unnecessary complexity. To tackle this issue, we propose generating CadQuery code directly from text, leveraging the strengths of pretrained LLMs to produce 3D models without intermediate representations, using this Python-based scripting language. Since LLMs already excel at Python generation and spatial reasoning, fine-tuning them on Text-to-CadQuery data proves highly effective. Given that these capabilities typically improve with scale, we hypothesize that larger models will perform better after fine-tuning. To enable this, we augment the Text2CAD dataset with 170,000 CadQuery annotations. We fine-tune six open-source LLMs of varying sizes and observe consistent improvements. Our best model achieves a top-1 exact match of 69.3%, up from 58.8%, and reduces Chamfer Distance by 48.6%. Project page: https://github.com/Text-to-CadQuery/Text-to-CadQuery.
A Mobile Additive Manufacturing Robot Framework for Smart Manufacturing Systems
Apr 19, 2024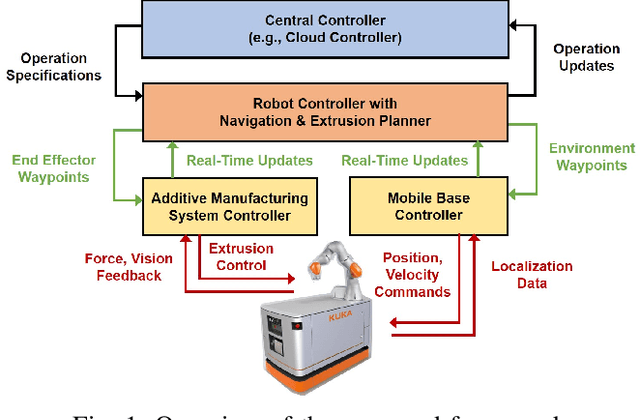
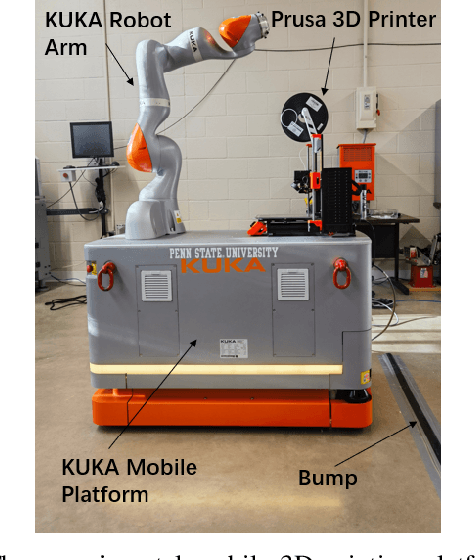
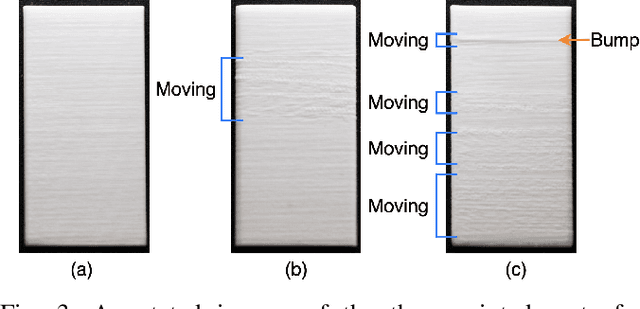
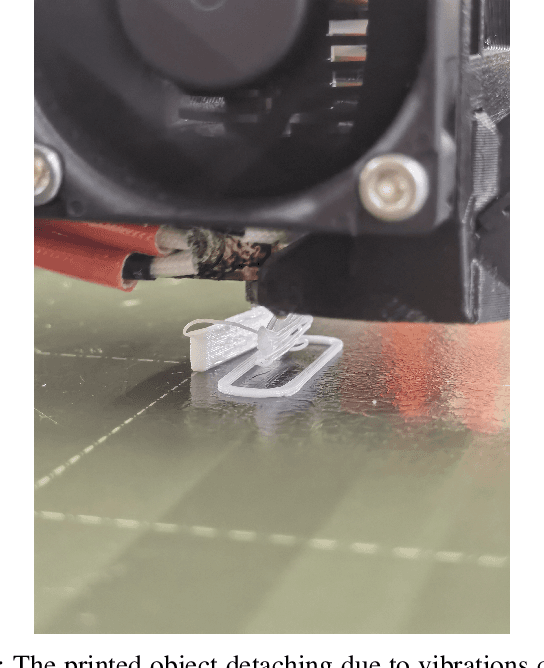
Recent technological innovations in the areas of additive manufacturing and collaborative robotics have paved the way toward realizing the concept of on-demand, personalized production on the shop floor. Additive manufacturing process can provide the capability of printing highly customized parts based on various customer requirements. Autonomous, mobile systems provide the flexibility to move custom parts around the shop floor to various manufacturing operations, as needed by product requirements. In this work, we proposed a mobile additive manufacturing robot framework for merging an additive manufacturing process system with an autonomous mobile base. Two case studies showcase the potential benefits of the proposed mobile additive manufacturing framework. The first case study overviews the effect that a mobile system can have on a fused deposition modeling process. The second case study showcases how integrating a mobile additive manufacturing machine can improve the throughput of the manufacturing system. The major findings of this study are that the proposed mobile robotic AM has increased throughput by taking advantage of the travel time between operations/processing sites. It is particularly suited to perform intermittent operations (e.g., preparing feedstock) during the travel time of the robotic AM. One major implication of this study is its application in manufacturing structural components (e.g., concrete construction, and feedstock preparation during reconnaissance missions) in remote or extreme terrains with on-site or on-demand feedstocks.
RASEC: Rescaling Acquisition Strategy with Energy Constraints under SE-OU Fusion Kernel for Active Trachea Palpation and Incision Recommendation in Laryngeal Region
Nov 12, 2021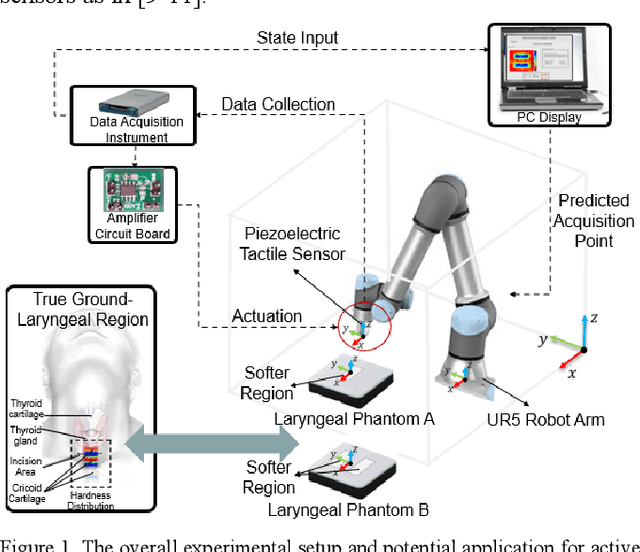
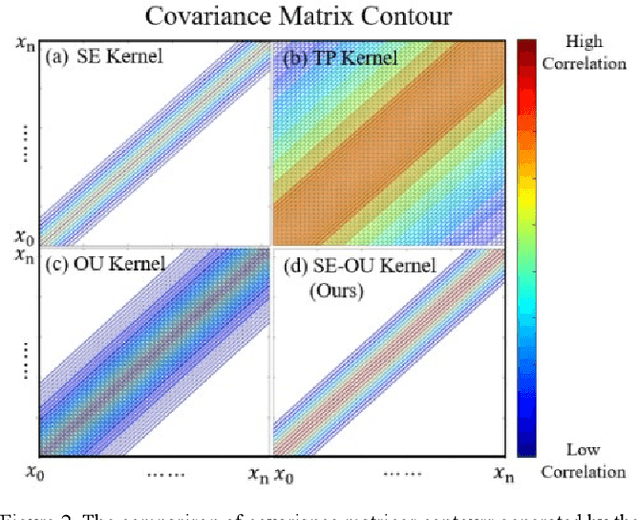
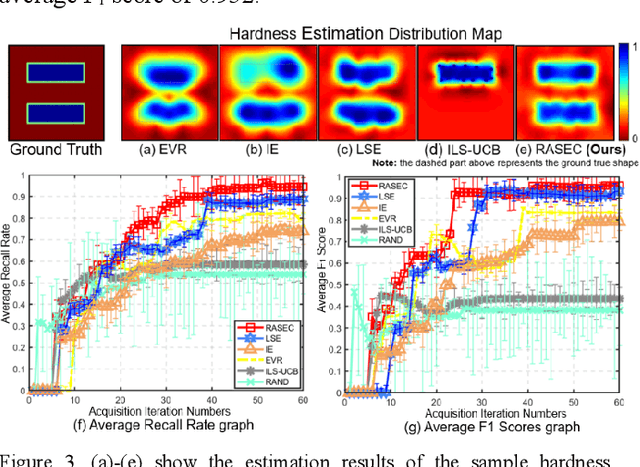
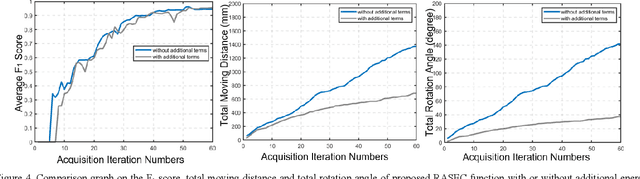
A novel palpation-based incision detection strategy in the laryngeal region, potentially for robotic tracheotomy, is proposed in this letter. A tactile sensor is introduced to measure tissue hardness in the specific laryngeal region by gentle contact. The kernel fusion method is proposed to combine the Squared Exponential (SE) kernel with Ornstein-Uhlenbeck (OU) kernel to figure out the drawbacks that the existing kernel functions are not sufficiently optimal in this scenario. Moreover, we further regularize exploration factor and greed factor, and the tactile sensor's moving distance and the robotic base link's rotation angle during the incision localization process are considered as new factors in the acquisition strategy. We conducted simulation and physical experiments to compare the newly proposed algorithm - Rescaling Acquisition Strategy with Energy Constraints (RASEC) in trachea detection with current palpation-based acquisition strategies. The result indicates that the proposed acquisition strategy with fusion kernel can successfully localize the incision with the highest algorithm performance (Average Precision 0.932, Average Recall 0.973, Average F1 score 0.952). During the robotic palpation process, the cumulative moving distance is reduced by 50%, and the cumulative rotation angle is reduced by 71.4% with no sacrifice in the comprehensive performance capabilities. Therefore, it proves that RASEC can efficiently suggest the incision zone in the laryngeal region and greatly reduced the energy loss.