 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Mobile Additive Manufacturing Robot Framework for Smart Manufacturing Systems
Apr 19, 2024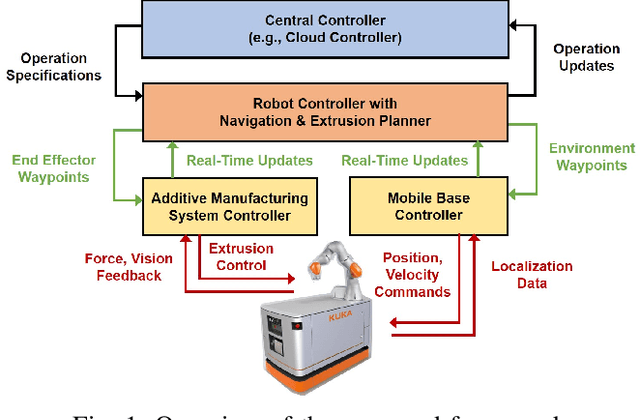
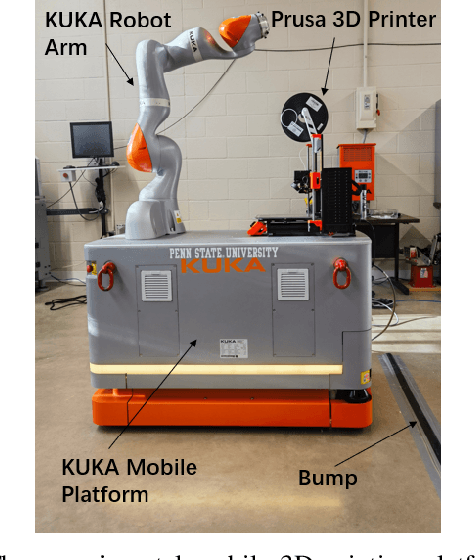
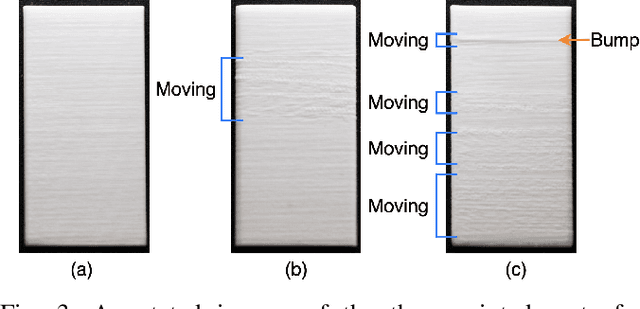
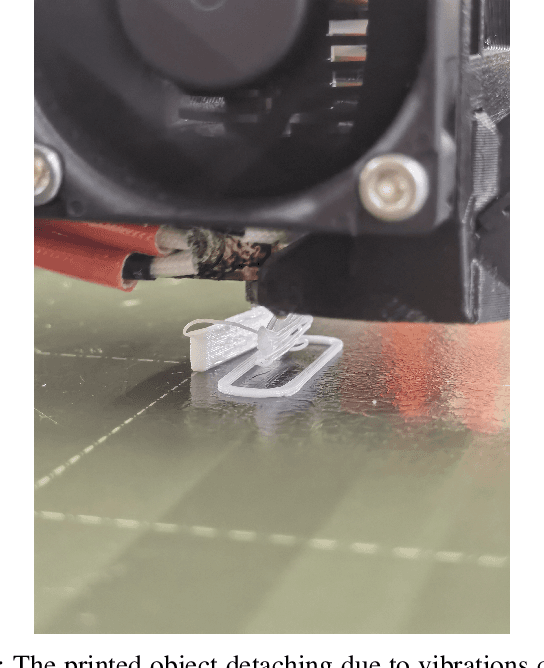
Recent technological innovations in the areas of additive manufacturing and collaborative robotics have paved the way toward realizing the concept of on-demand, personalized production on the shop floor. Additive manufacturing process can provide the capability of printing highly customized parts based on various customer requirements. Autonomous, mobile systems provide the flexibility to move custom parts around the shop floor to various manufacturing operations, as needed by product requirements. In this work, we proposed a mobile additive manufacturing robot framework for merging an additive manufacturing process system with an autonomous mobile base. Two case studies showcase the potential benefits of the proposed mobile additive manufacturing framework. The first case study overviews the effect that a mobile system can have on a fused deposition modeling process. The second case study showcases how integrating a mobile additive manufacturing machine can improve the throughput of the manufacturing system. The major findings of this study are that the proposed mobile robotic AM has increased throughput by taking advantage of the travel time between operations/processing sites. It is particularly suited to perform intermittent operations (e.g., preparing feedstock) during the travel time of the robotic AM. One major implication of this study is its application in manufacturing structural components (e.g., concrete construction, and feedstock preparation during reconnaissance missions) in remote or extreme terrains with on-site or on-demand feedstocks.
Model-based Offline Imitation Learning with Non-expert Data
Jun 11, 2022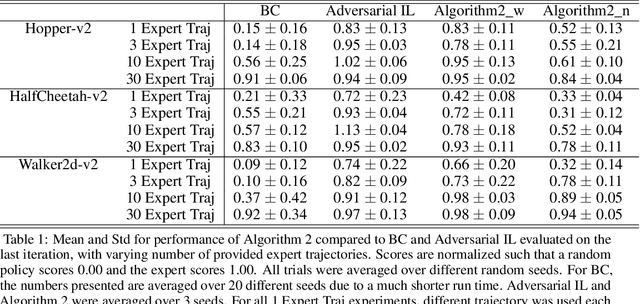

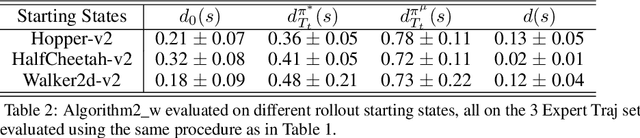
Although Behavioral Cloning (BC) in theory suffers compounding errors, its scalability and simplicity still makes it an attractive imitation learning algorithm. In contrast, imitation approaches with adversarial training typically does not share the same problem, but necessitates interactions with the environment. Meanwhile, most imitation learning methods only utilises optimal datasets, which could be significantly more expensive to obtain than its suboptimal counterpart. A question that arises is, can we utilise the suboptimal dataset in a principled manner, which otherwise would have been idle? We propose a scalable model-based offline imitation learning algorithmic framework that leverages datasets collected by both suboptimal and optimal policies, and show that its worst case suboptimality becomes linear in the time horizon with respect to the expert samples. We empirically validate our theoretical results and show that the proposed method \textit{always} outperforms BC in the low data regime on simulated continuous control domains