 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaceIt3D: Language-Guided Object Placement in Real 3D Scenes
May 08, 2025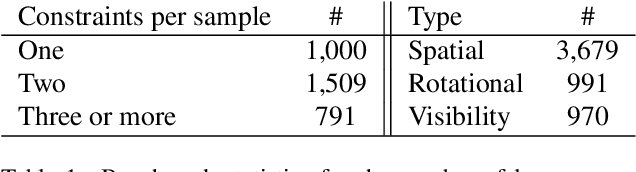
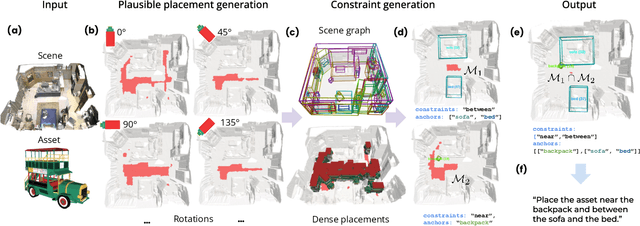
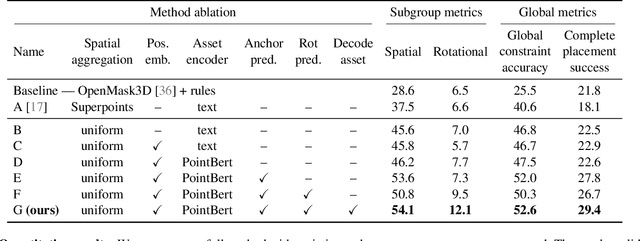
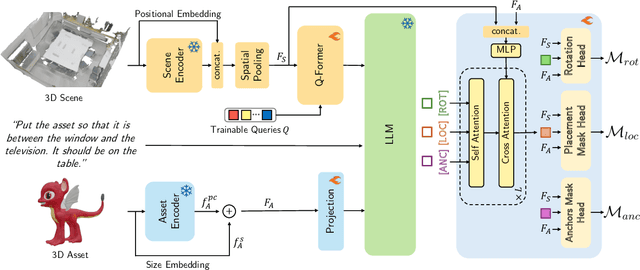
We introduce the novel task of Language-Guided Object Placement in Real 3D Scenes. Our model is given a 3D scene's point cloud, a 3D asset, and a textual prompt broadly describing where the 3D asset should be placed. The task here is to find a valid placement for the 3D asset that respects the prompt. Compared with other language-guided localization tasks in 3D scenes such as grounding, this task has specific challenges: it is ambiguous because it has multiple valid solutions, and it requires reasoning about 3D geometric relationships and free space. We inaugurate this task by proposing a new benchmark and evaluation protocol. We also introduce a new dataset for training 3D LLMs on this task, as well as the first method to serve as a non-trivial baseline. We believe that this challenging task and our new benchmark could become part of the suite of benchmarks used to evaluate and compare generalist 3D LLM models.
MVSAnywhere: Zero-Shot Multi-View Stereo
Mar 28, 2025Computing accurate depth from multiple views is a fundamental and longstanding challenge in computer vision. However, most existing approaches do not generalize well across different domains and scene types (e.g. indoor vs. outdoor). Training a general-purpose multi-view stereo model is challenging and raises several questions, e.g. how to best make use of transformer-based architectures, how to incorporate additional metadata when there is a variable number of input views, and how to estimate the range of valid depths which can vary considerably across different scenes and is typically not known a priori? To address these issues, we introduce MVSA, a novel and versatile Multi-View Stereo architecture that aims to work Anywhere by generalizing across diverse domains and depth ranges. MVSA combines monocular and multi-view cues with an adaptive cost volume to deal with scale-related issues. We demonstrate state-of-the-art zero-shot depth estimation on the Robust Multi-View Depth Benchmark, surpassing existing multi-view stereo and monocular baselines.
Morpheus: Text-Driven 3D Gaussian Splat Shape and Color Stylization
Mar 03, 2025
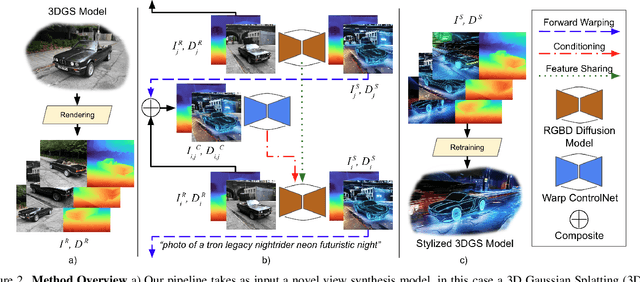
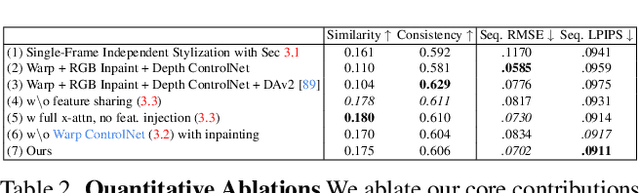
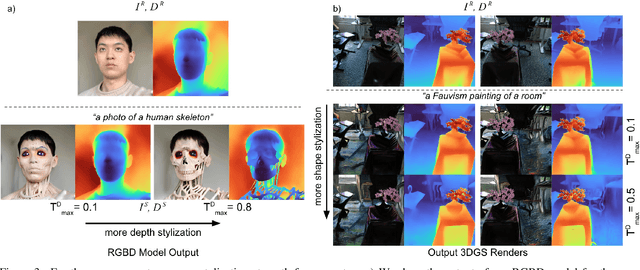
Exploring real-world spaces using novel-view synthesis is fun, and reimagining those worlds in a different style adds another layer of excitement. Stylized worlds can also be used for downstream tasks where there is limited training data and a need to expand a model's training distribution. Most current novel-view synthesis stylization techniques lack the ability to convincingly change geometry. This is because any geometry change requires increased style strength which is often capped for stylization stability and consistency. In this work, we propose a new autoregressive 3D Gaussian Splatting stylization method. As part of this method, we contribute a new RGBD diffusion model that allows for strength control over appearance and shape stylization. To ensure consistency across stylized frames, we use a combination of novel depth-guided cross attention, feature injection, and a Warp ControlNet conditioned on composite frames for guiding the stylization of new frames. We validate our method via extensive qualitative results, quantitative experiments, and a user study. Code will be released online.
DoubleTake: Geometry Guided Depth Estimation
Jun 26, 2024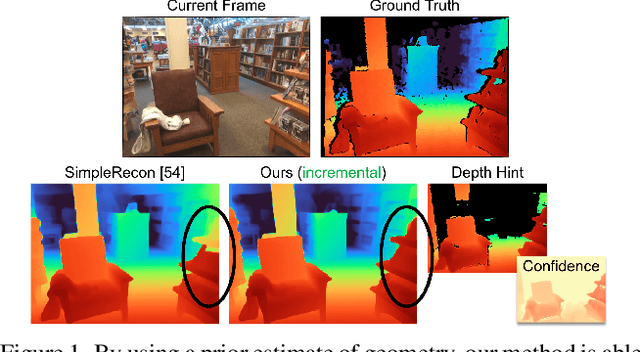
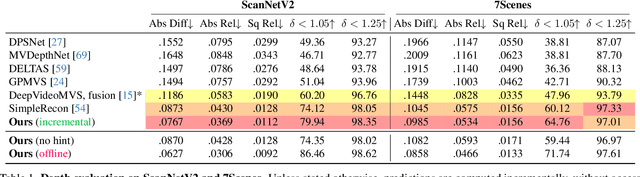
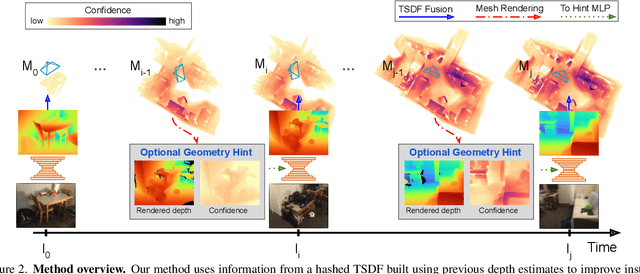
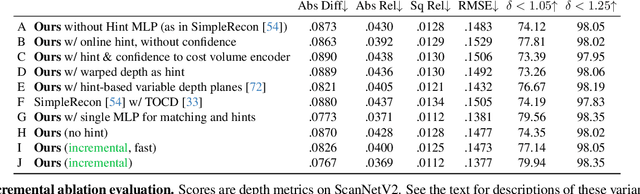
Estimating depth from a sequence of posed RGB images is a fundamental computer vision task, with applications in augmented reality, path planning etc. Prior work typically makes use of previous frames in a multi view stereo framework, relying on matching textures in a local neighborhood. In contrast, our model leverages historical predictions by giving the latest 3D geometry data as an extra input to our network. This self-generated geometric hint can encode information from areas of the scene not covered by the keyframes and it is more regularized when compared to individual predicted depth maps for previous frames. We introduce a Hint MLP which combines cost volume features with a hint of the prior geometry, rendered as a depth map from the current camera location, together with a measure of the confidence in the prior geometry. We demonstrate that our method, which can run at interactive speeds, achieves state-of-the-art estimates of depth and 3D scene reconstruction in both offline and incremental evaluation scenarios.
AirPlanes: Accurate Plane Estimation via 3D-Consistent Embeddings
Jun 13, 2024Extracting planes from a 3D scene is useful for downstream tasks in robotics and augmented reality. In this paper we tackle the problem of estimating the planar surfaces in a scene from posed images. Our first finding is that a surprisingly competitive baseline results from combining popular clustering algorithms with recent improvements in 3D geometry estimation. However, such purely geometric methods are understandably oblivious to plane semantics, which are crucial to discerning distinct planes. To overcome this limitation, we propose a method that predicts multi-view consistent plane embeddings that complement geometry when clustering points into planes. We show through extensive evaluation on the ScanNetV2 dataset that our new method outperforms existing approaches and our strong geometric baseline for the task of plane estimation.
Virtual Occlusions Through Implicit Depth
May 11, 2023



For augmented reality (AR), it is important that virtual assets appear to `sit among' real world objects. The virtual element should variously occlude and be occluded by real matter, based on a plausible depth ordering. This occlusion should be consistent over time as the viewer's camera moves. Unfortunately, small mistakes in the estimated scene depth can ruin the downstream occlusion mask, and thereby the AR illusion. Especially in real-time settings, depths inferred near boundaries or across time can be inconsistent. In this paper, we challenge the need for depth-regression as an intermediate step. We instead propose an implicit model for depth and use that to predict the occlusion mask directly. The inputs to our network are one or more color images, plus the known depths of any virtual geometry. We show how our occlusion predictions are more accurate and more temporally stable than predictions derived from traditional depth-estimation models. We obtain state-of-the-art occlusion results on the challenging ScanNetv2 dataset and superior qualitative results on real scenes.
SimpleRecon: 3D Reconstruction Without 3D Convolutions
Aug 31, 2022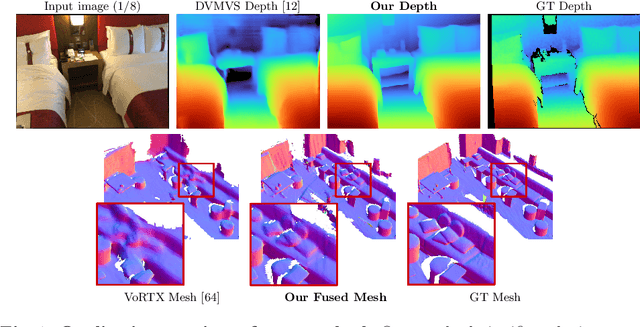
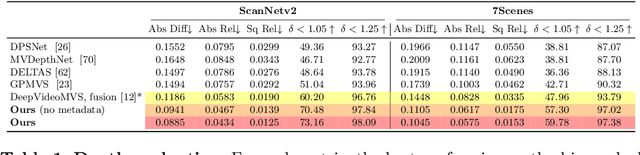
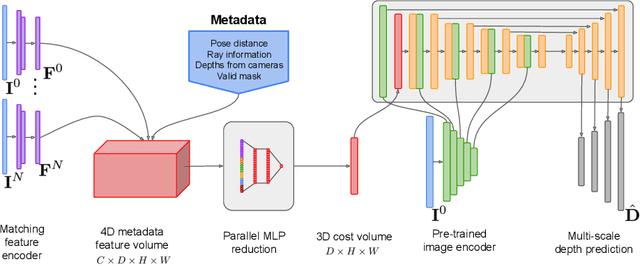
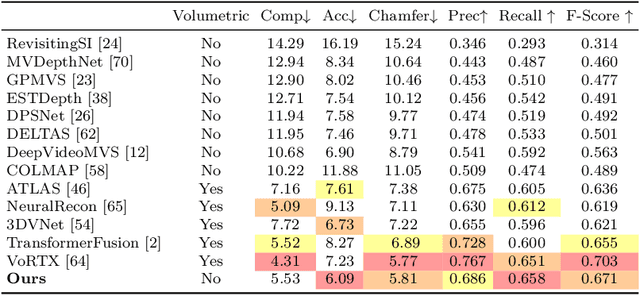
Traditionally, 3D indoor scene reconstruction from posed images happens in two phases: per-image depth estimation, followed by depth merging and surface reconstruction. Recently, a family of methods have emerged that perform reconstruction directly in final 3D volumetric feature space. While these methods have shown impressive reconstruction results, they rely on expensive 3D convolutional layers, limiting their application in resource-constrained environments. In this work, we instead go back to the traditional route, and show how focusing on high quality multi-view depth prediction leads to highly accurate 3D reconstructions using simple off-the-shelf depth fusion. We propose a simple state-of-the-art multi-view depth estimator with two main contributions: 1) a carefully-designed 2D CNN which utilizes strong image priors alongside a plane-sweep feature volume and geometric losses, combined with 2) the integration of keyframe and geometric metadata into the cost volume which allows informed depth plane scoring. Our method achieves a significant lead over the current state-of-the-art for depth estimation and close or better for 3D reconstruction on ScanNet and 7-Scenes, yet still allows for online real-time low-memory reconstruction. Code, models and results are available at https://nianticlabs.github.io/simplerecon
Single Image Depth Estimation using Wavelet Decomposition
Jun 03, 2021
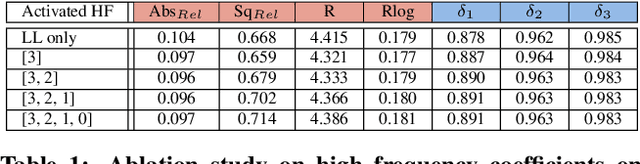
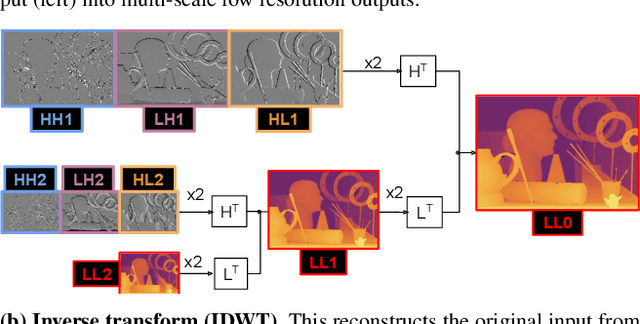
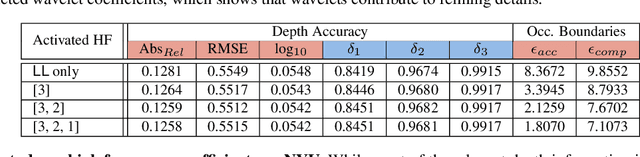
We present a novel method for predicting accurate depths from monocular images with high efficiency. This optimal efficiency is achieved by exploiting wavelet decomposition, which is integrated in a fully differentiable encoder-decoder architecture. We demonstrate that we can reconstruct high-fidelity depth maps by predicting sparse wavelet coefficients. In contrast with previous works, we show that wavelet coefficients can be learned without direct supervision on coefficients. Instead we supervise only the final depth image that is reconstructed through the inverse wavelet transform. We additionally show that wavelet coefficients can be learned in fully self-supervised scenarios, without access to ground-truth depth. Finally, we apply our method to different state-of-the-art monocular depth estimation models, in each case giving similar or better results compared to the original model, while requiring less than half the multiply-adds in the decoder network. Code at https://github.com/nianticlabs/wavelet-monodepth
The Temporal Opportunist: Self-Supervised Multi-Frame Monocular Depth
Apr 29, 2021
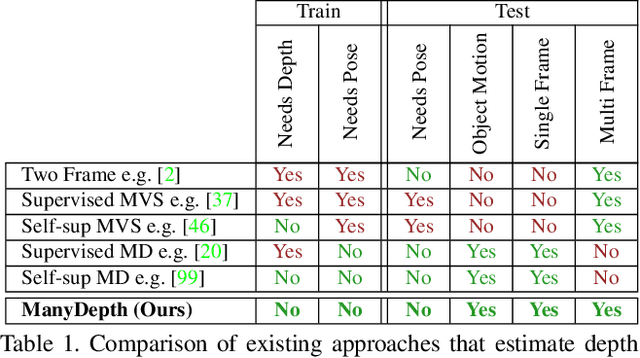
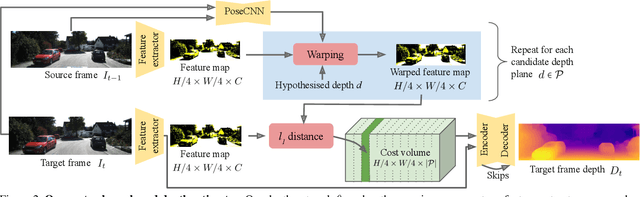
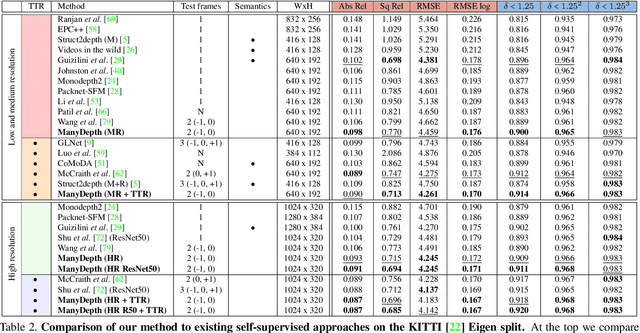
Self-supervised monocular depth estimation networks are trained to predict scene depth using nearby frames as a supervision signal during training. However, for many applications, sequence information in the form of video frames is also available at test time. The vast majority of monocular networks do not make use of this extra signal, thus ignoring valuable information that could be used to improve the predicted depth. Those that do, either use computationally expensive test-time refinement techniques or off-the-shelf recurrent networks, which only indirectly make use of the geometric information that is inherently available. We propose ManyDepth, an adaptive approach to dense depth estimation that can make use of sequence information at test time, when it is available. Taking inspiration from multi-view stereo, we propose a deep end-to-end cost volume based approach that is trained using self-supervision only. We present a novel consistency loss that encourages the network to ignore the cost volume when it is deemed unreliable, e.g. in the case of moving objects, and an augmentation scheme to cope with static cameras. Our detailed experiments on both KITTI and Cityscapes show that we outperform all published self-supervised baselines, including those that use single or multiple frames at test time.
Learning Stereo from Single Images
Aug 20, 2020
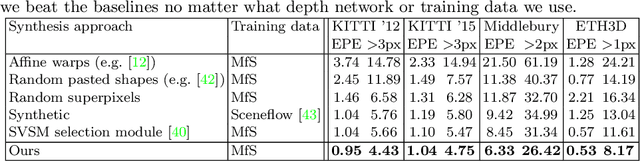
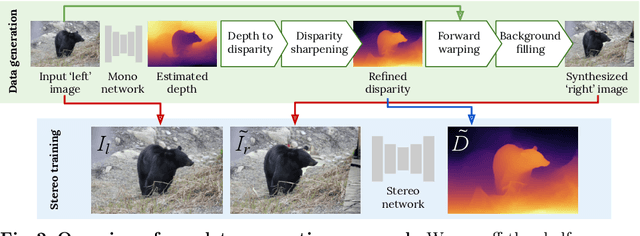
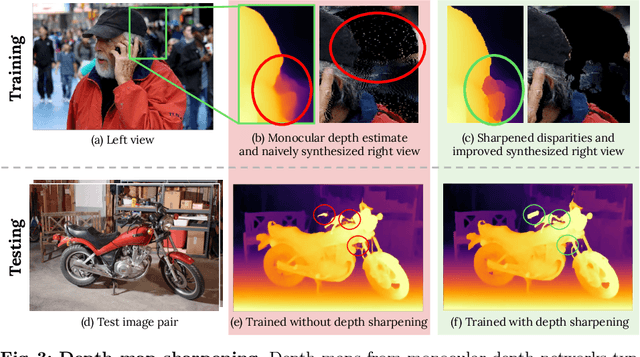
Supervised deep networks are among the best methods for finding correspondences in stereo image pairs. Like all supervised approaches, these networks require ground truth data during training. However, collecting large quantities of accurate dense correspondence data is very challenging. We propose that it is unnecessary to have such a high reliance on ground truth depths or even corresponding stereo pairs. Inspired by recent progress in monocular depth estimation, we generate plausible disparity maps from single images. In turn, we use those flawed disparity maps in a carefully designed pipeline to generate stereo training pairs. Training in this manner makes it possible to convert any collection of single RGB images into stereo training data. This results in a significant reduction in human effort, with no need to collect real depths or to hand-design synthetic data. We can consequently train a stereo matching network from scratch on datasets like COCO, which were previously hard to exploit for stereo. Through extensive experiments we show that our approach outperforms stereo networks trained with standard synthetic datasets, when evaluated on KITTI, ETH3D, and Middlebury.