 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs AI currently capable of identifying wild oysters? A comparison of human annotators against the AI model, ODYSSEE
May 06, 2025Oysters are ecologically and commercially important species that require frequent monitoring to track population demographics (e.g. abundance, growth, mortality). Current methods of monitoring oyster reefs often require destructive sampling methods and extensive manual effort. Therefore, they are suboptimal for small-scale or sensitive environments. A recent alternative, the ODYSSEE model, was developed to use deep learning techniques to identify live oysters using video or images taken in the field of oyster reefs to assess abundance. The validity of this model in identifying live oysters on a reef was compared to expert and non-expert annotators. In addition, we identified potential sources of prediction error. Although the model can make inferences significantly faster than expert and non-expert annotators (39.6 s, $2.34 \pm 0.61$ h, $4.50 \pm 1.46$ h, respectively), the model overpredicted the number of live oysters, achieving lower accuracy (63\%) in identifying live oysters compared to experts (74\%) and non-experts (75\%) alike. Image quality was an important factor in determining the accuracy of the model and the annotators. Better quality images improved human accuracy and worsened model accuracy. Although ODYSSEE was not sufficiently accurate, we anticipate that future training on higher-quality images, utilizing additional live imagery, and incorporating additional annotation training classes will greatly improve the model's predictive power based on the results of this analysis. Future research should address methods that improve the detection of living vs. dead oysters.
System Identification and Adaptive Input Estimation on the Jaiabot Micro Autonomous Underwater Vehicle
Apr 01, 2025This paper reports an attempt to model the system dynamics and estimate both the unknown internal control input and the state of a recently developed marine autonomous vehicle, the Jaiabot. Although the Jaiabot has shown promise in many applications, process and sensor noise necessitates state estimation and noise filtering. In this work, we present the first surge and heading linear dynamical model for Jaiabots derived from real data collected during field testing. An adaptive input estimation algorithm is implemented to accurately estimate the control input and hence the state. For validation, this approach is compared to the classical Kalman filter, highlighting its advantages in handling unknown control inputs.
ODYSSEE: Oyster Detection Yielded by Sensor Systems on Edge Electronics
Sep 11, 2024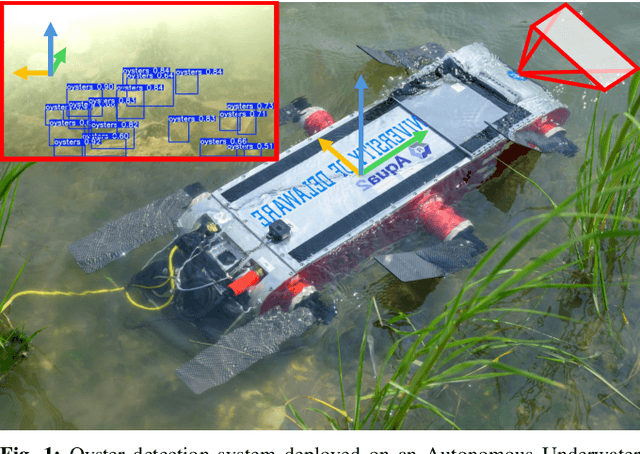
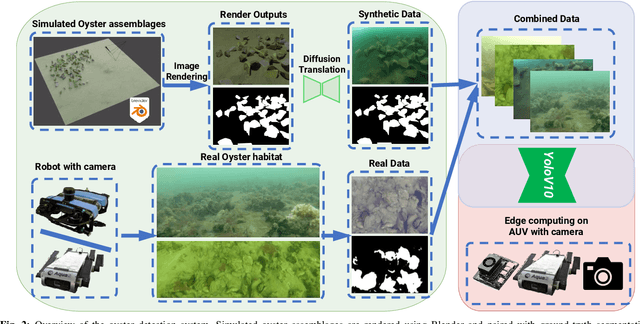
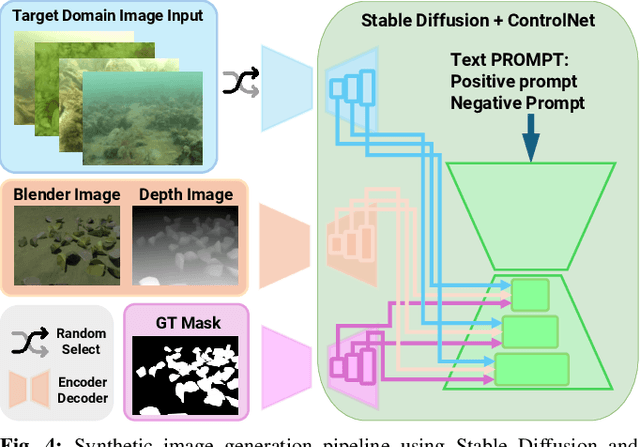
Oysters are a keystone species in coastal ecosystems, offering significant economic, environmental, and cultural benefits. However, current monitoring systems are often destructive, typically involving dredging to physically collect and count oysters. A nondestructive alternative is manual identification from video footage collected by divers, which is time-consuming and labor-intensive with expert input. An alternative to human monitoring is the deployment of a system with trained object detection models that performs real-time, on edge oyster detection in the field. One such platform is the Aqua2 robot. Effective training of these models requires extensive high-quality data, which is difficult to obtain in marine settings. To address these complications, we introduce a novel method that leverages stable diffusion to generate high-quality synthetic data for the marine domain. We exploit diffusion models to create photorealistic marine imagery, using ControlNet inputs to ensure consistency with the segmentation ground-truth mask, the geometry of the scene, and the target domain of real underwater images for oysters. The resulting dataset is used to train a YOLOv10-based vision model, achieving a state-of-the-art 0.657 mAP@50 for oyster detection on the Aqua2 platform. The system we introduce not only improves oyster habitat monitoring, but also paves the way to autonomous surveillance for various tasks in marine contexts, improving aquaculture and conservation efforts.
PAC Reinforcement Learning Algorithm for General-Sum Markov Games
Sep 05, 2020


This paper presents a theoretical framework for probably approximately correct (PAC) multi-agent reinforcement learning (MARL) algorithms for Markov games. The paper offers an extension to the well-known Nash Q-learning algorithm, using the idea of delayed Q-learning, in order to build a new PAC MARL algorithm for general-sum Markov games. In addition to guiding the design of a provably PAC MARL algorithm, the framework enables checking whether an arbitrary MARL algorithm is PAC. Comparative numerical results demonstrate performance and robustness.
A Hybrid PAC Reinforcement Learning Algorithm
Sep 05, 2020

This paper offers a new hybrid probably asymptotically correct (PAC) reinforcement learning (RL) algorithm for Markov decision processes (MDPs) that intelligently maintains favorable features of its parents. The designed algorithm, referred to as the Dyna-Delayed Q-learning (DDQ) algorithm, combines model-free and model-based learning approaches while outperforming both in most cases. The paper includes a PAC analysis of the DDQ algorithm and a derivation of its sample complexity. Numerical results that support the claim regarding the new algorithm's sample efficiency compared to its parents are showcased in a small grid-world example.
Design and Construction of Unmanned Ground Vehicles for Sub-Canopy Plant Phenotyping
Mar 25, 2019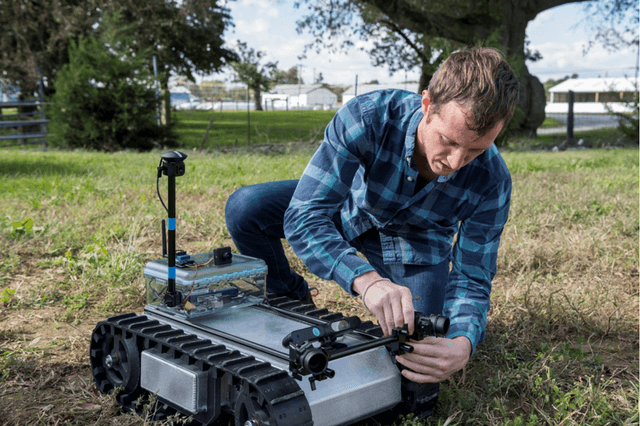
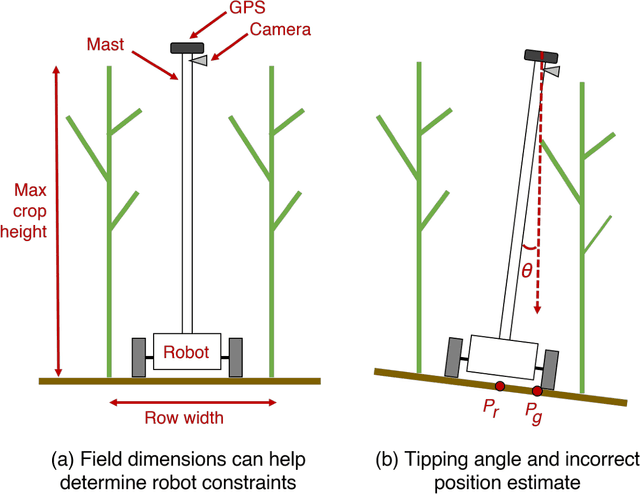
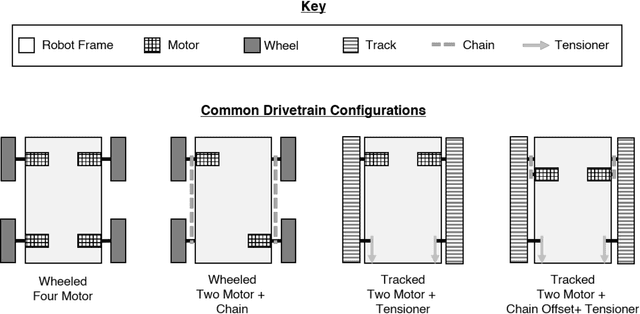
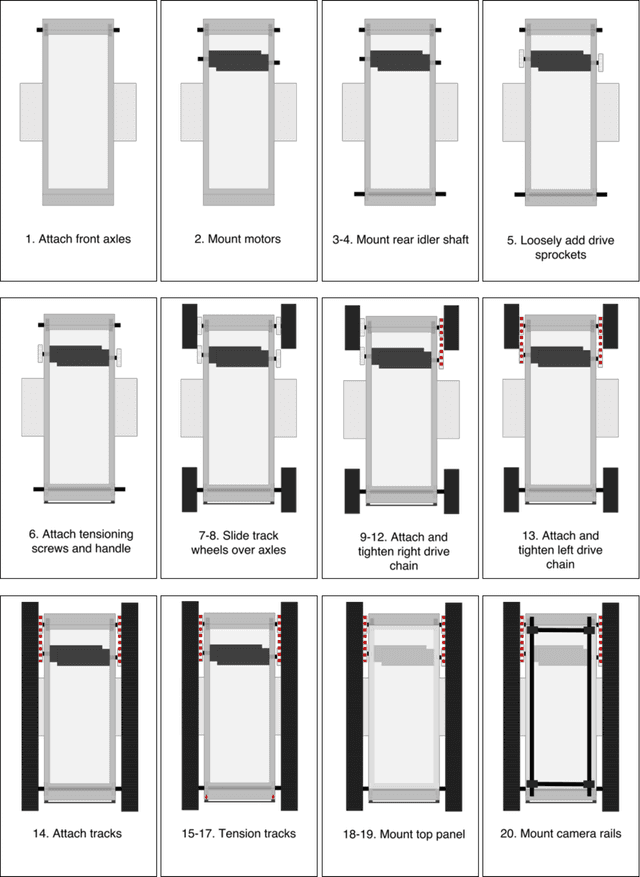
Unmanned ground vehicles can capture a sub-canopy perspective for plant phenotyping, but their design and construction can be a challenge for scientists unfamiliar with robotics. Here we describe the necessary components and provide guidelines for designing and constructing an autonomous ground robot that can be used for plant phenotyping.
Visual-Inertial Target Tracking and Motion Planning for UAV-based Radiation Detection
May 23, 2018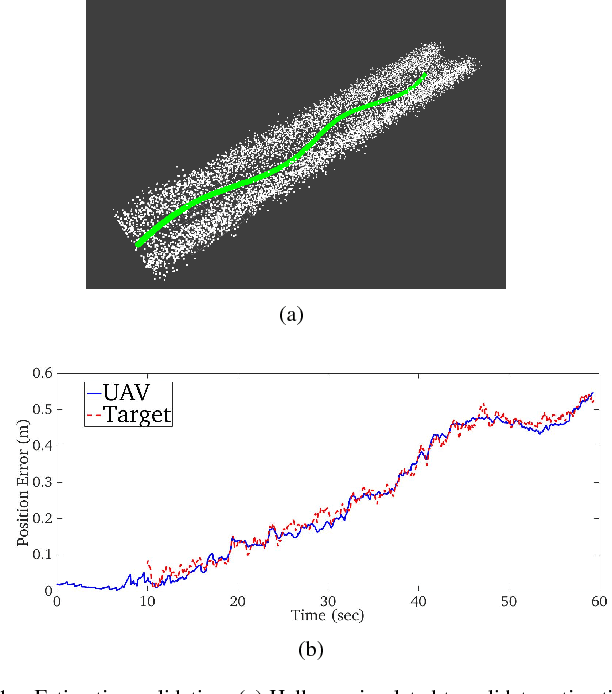



This paper addresses the problem of detecting radioactive material in transit using an UAV of minimal sensing capability, where the objective is to classify the target's radioactivity as the vehicle plans its paths through the workspace while tracking the target for a short time interval. To this end, we propose a motion planning framework that integrates tightly-coupled visual-inertial localization and target tracking. In this framework,the 3D workspace is known, and this information together with the UAV dynamics, is used to construct a navigation function that generates dynamically feasible, safe paths which avoid obstacles and provably converge to the moving target. The efficacy of the proposed approach is validated through realistic simulations in Gazebo.
Stochastic receding horizon control of nonlinear stochastic systems with probabilistic state constraints
Nov 16, 2012



The paper describes a receding horizon control design framework for continuous-time stochastic nonlinear systems subject to probabilistic state constraints. The intention is to derive solutions that are implementable in real-time on currently available mobile processors. The approach consists of decomposing the problem into designing receding horizon reference paths based on the drift component of the system dynamics, and then implementing a stochastic optimal controller to allow the system to stay close and follow the reference path. In some cases, the stochastic optimal controller can be obtained in closed form; in more general cases, pre-computed numerical solutions can be implemented in real-time without the need for on-line computation. The convergence of the closed loop system is established assuming no constraints on control inputs, and simulation results are provided to corroborate the theoretical predictions.
Symbolic Planning and Control Using Game Theory and Grammatical Inference
Oct 05, 2012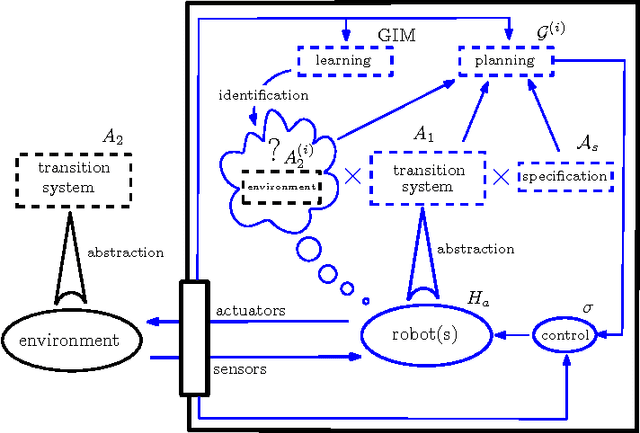
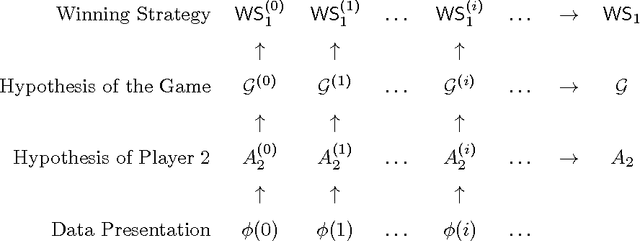

This paper presents an approach that brings together game theory with grammatical inference and discrete abstractions in order to synthesize control strategies for hybrid dynamical systems performing tasks in partially unknown but rule-governed adversarial environments. The combined formulation guarantees that a system specification is met if (a) the true model of the environment is in the class of models inferable from a positive presentation, (b) a characteristic sample is observed, and (c) the task specification is satisfiable given the capabilities of the system (agent) and the environment.
Networked Decision Making for Poisson Processes: Application to nuclear detection
Oct 04, 2012


This paper addresses a detection problem where several spatially distributed sensors independently observe a time-inhomogeneous stochastic process. The task is to decide between two hypotheses regarding the statistics of the observed process at the end of a fixed time interval. In the proposed method, each of the sensors transmits once to a fusion center a locally processed summary of its information in the form of a likelihood ratio. The fusion center then combines these messages to arrive at an optimal decision in the Neyman-Pearson framework. The approach is motivated by applications arising in the detection of mobile radioactive sources, and offers a pathway toward the development of novel fixed- interval detection algorithms that combine decentralized processing with optimal centralized decision making.