Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Construction of Unmanned Ground Vehicles for Sub-Canopy Plant Phenotyping
Mar 25, 2019
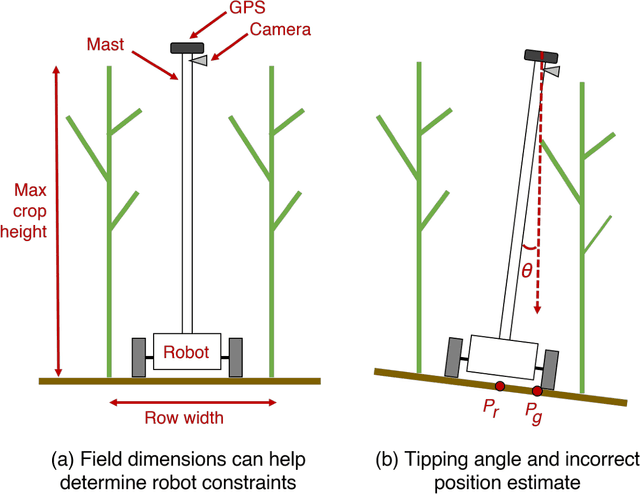
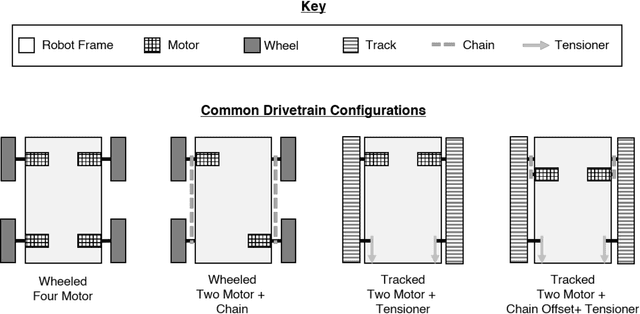
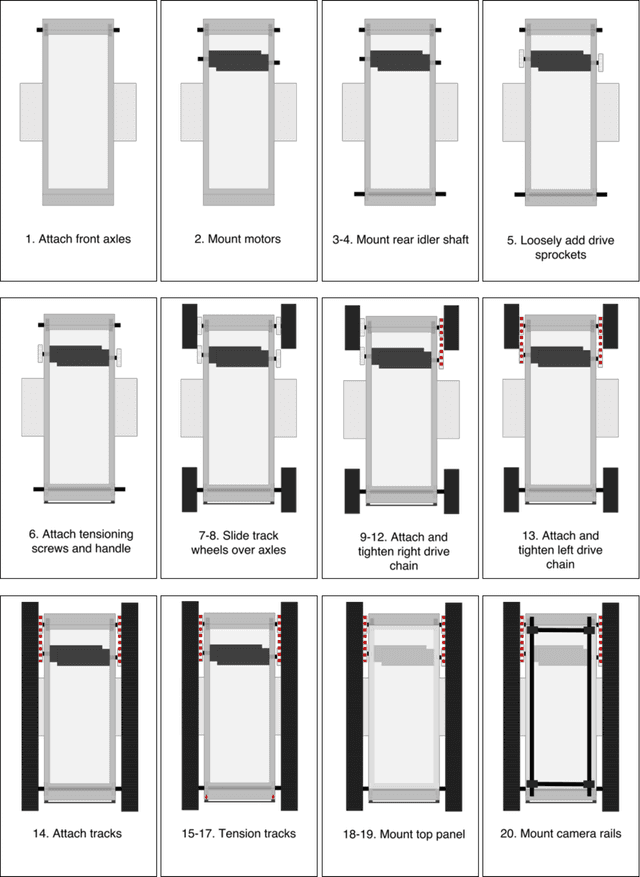
Unmanned ground vehicles can capture a sub-canopy perspective for plant phenotyping, but their design and construction can be a challenge for scientists unfamiliar with robotics. Here we describe the necessary components and provide guidelines for designing and constructing an autonomous ground robot that can be used for plant phenotyping.
Via