 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Construction of Unmanned Ground Vehicles for Sub-Canopy Plant Phenotyping
Mar 25, 2019
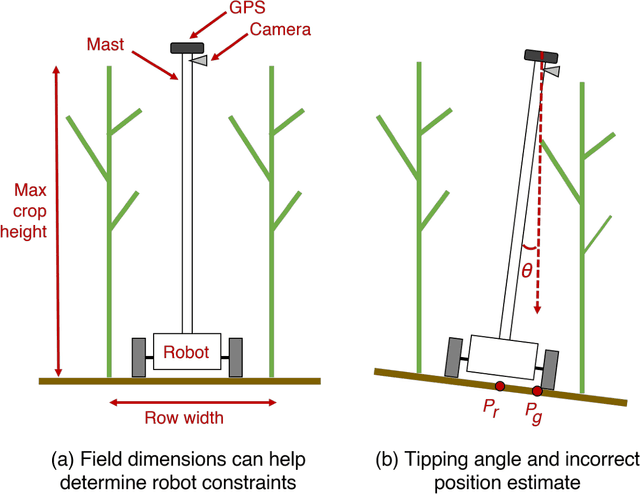
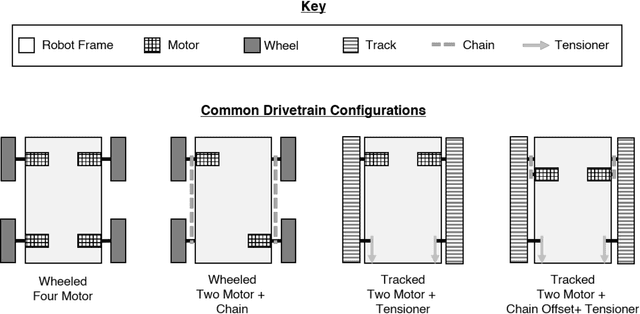
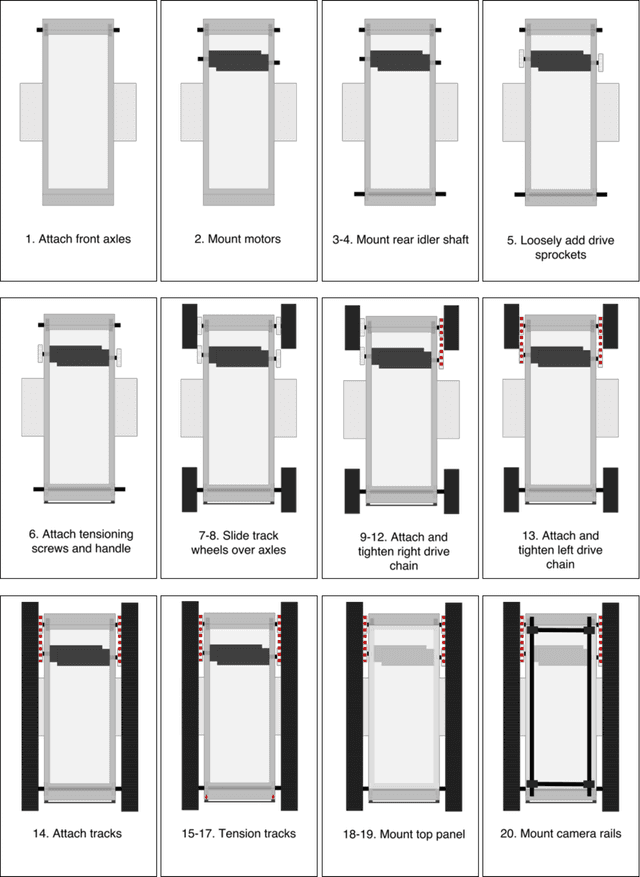
Unmanned ground vehicles can capture a sub-canopy perspective for plant phenotyping, but their design and construction can be a challenge for scientists unfamiliar with robotics. Here we describe the necessary components and provide guidelines for designing and constructing an autonomous ground robot that can be used for plant phenotyping.
A Scaled Smart City for Experimental Validation of Connected and Automated Vehicles
Oct 31, 2017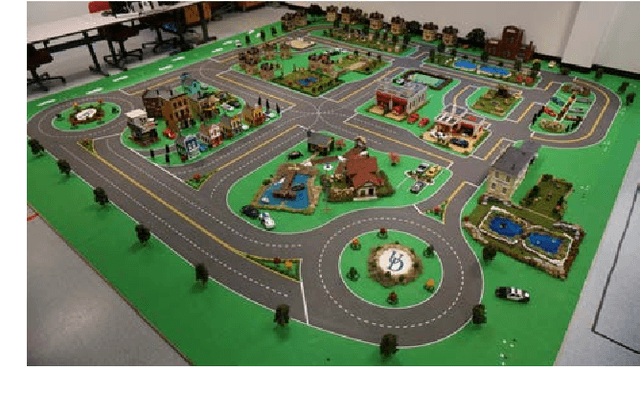
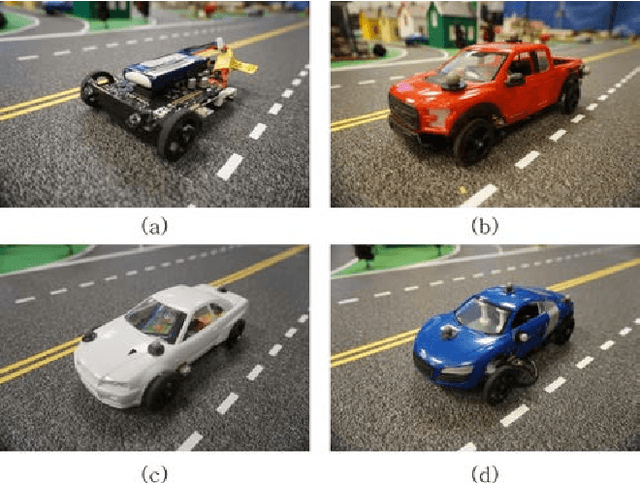
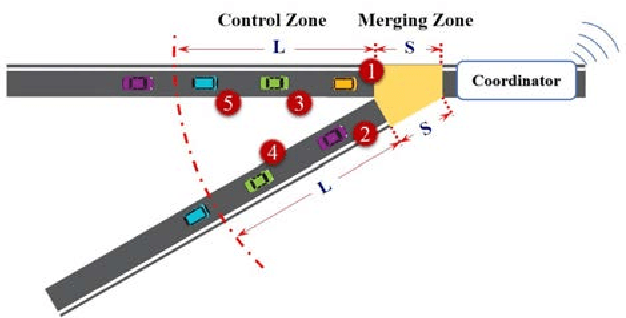

The common thread that characterizes energy efficient mobility systems for smart cities is their interconnectivity which enables the exchange of massive amounts of data; this, in turn, provides the opportunity to develop a decentralized framework to process this information and deliver real-time control actions that optimize energy consumption and other associated benefits. To seize these opportunities, this paper describes the development of a scaled smart city providing a glimpse that bridges the gap between simulation and full scale implementation of energy efficient mobility systems. Using this testbed, we can quickly, safely, and affordably experimentally validate control concepts aimed at enhancing our understanding of the implications of next generation mobility systems.