 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Agent Deep Reinforcement Learning Coordination Framework for Connected and Automated Vehicles at Merging Roadways
Sep 23, 2021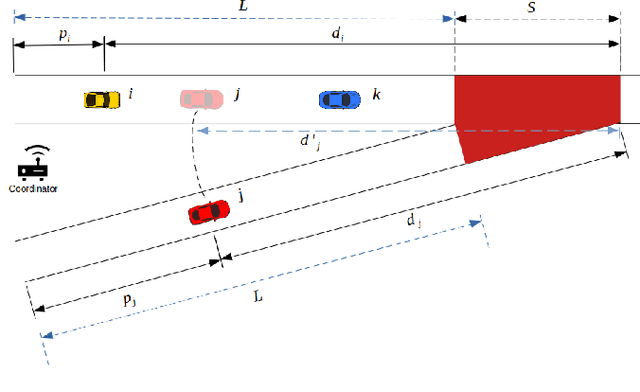
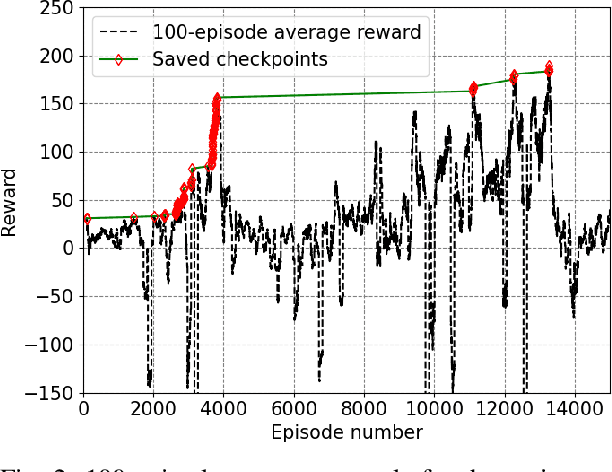
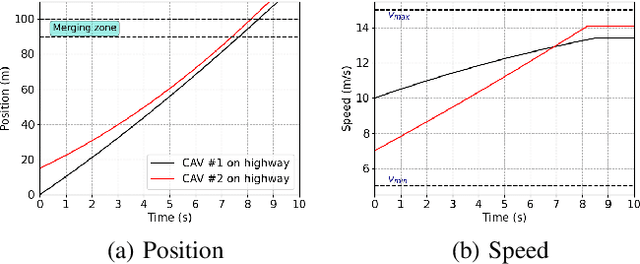
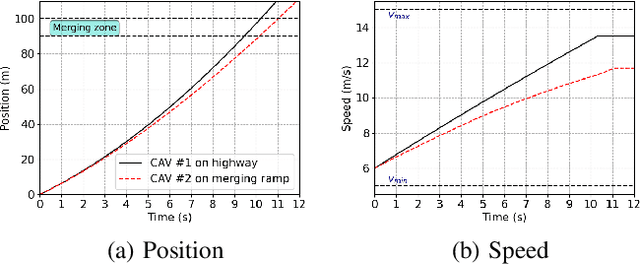
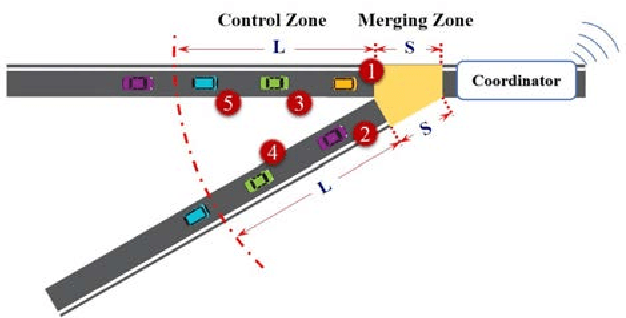
The steady increase in the number of vehicles operating on the highways continues to exacerbate congestion, accidents, energy consumption, and greenhouse gas emissions. Emerging mobility systems, e.g., connected and automated vehicles (CAVs), have the potential to directly address these issues and improve transportation network efficiency and safety. In this paper, we consider a highway merging scenario and propose a framework for coordinating CAVs such that stop-and-go driving is eliminated. We use a decentralized form of the actor-critic approach to deep reinforcement learning$-$multi-agent deep deterministic policy gradient. We demonstrate the coordination of CAVs through numerical simulations and show that a smooth traffic flow is achieved by eliminating stop-and-go driving. Videos and plots of the simulation results can be found at this supplemental $\href{https://sites.google.com/view/ud-ids-lab/MADRL}{site}$.
Simulation to Scaled City: Zero-Shot Policy Transfer for Traffic Control via Autonomous Vehicles
Feb 22, 2019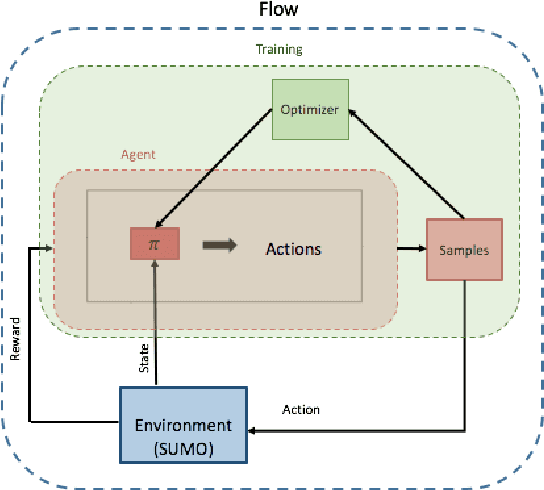
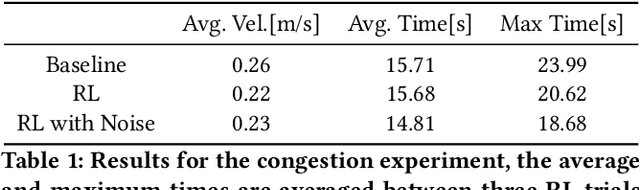

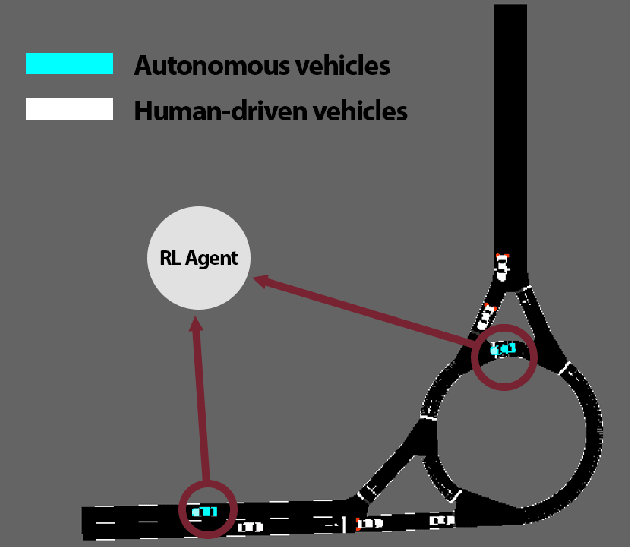
Using deep reinforcement learning, we train control policies for autonomous vehicles leading a platoon of vehicles onto a roundabout. Using Flow, a library for deep reinforcement learning in micro-simulators, we train two policies, one policy with noise injected into the state and action space and one without any injected noise. In simulation, the autonomous vehicle learns an emergent metering behavior for both policies in which it slows to allow for smoother merging. We then directly transfer this policy without any tuning to the University of Delaware Scaled Smart City (UDSSC), a 1:25 scale testbed for connected and automated vehicles. We characterize the performance of both policies on the scaled city. We show that the noise-free policy winds up crashing and only occasionally metering. However, the noise-injected policy consistently performs the metering behavior and remains collision-free, suggesting that the noise helps with the zero-shot policy transfer. Additionally, the transferred, noise-injected policy leads to a 5% reduction of average travel time and a reduction of 22% in maximum travel time in the UDSSC. Videos of the controllers can be found at https://sites.google.com/view/iccps-policy-transfer.
A Scaled Smart City for Experimental Validation of Connected and Automated Vehicles
Oct 31, 2017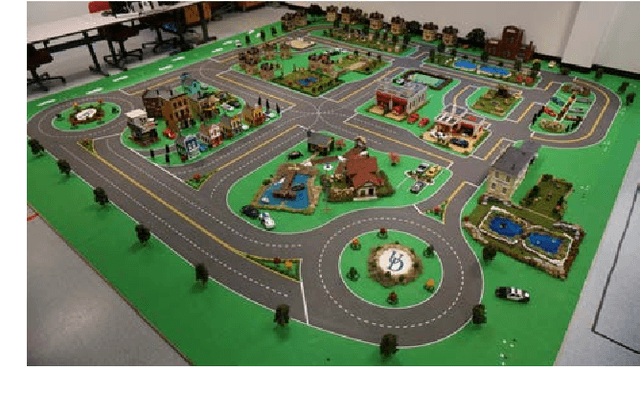

The common thread that characterizes energy efficient mobility systems for smart cities is their interconnectivity which enables the exchange of massive amounts of data; this, in turn, provides the opportunity to develop a decentralized framework to process this information and deliver real-time control actions that optimize energy consumption and other associated benefits. To seize these opportunities, this paper describes the development of a scaled smart city providing a glimpse that bridges the gap between simulation and full scale implementation of energy efficient mobility systems. Using this testbed, we can quickly, safely, and affordably experimentally validate control concepts aimed at enhancing our understanding of the implications of next generation mobility systems.