Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymbolic Planning and Control Using Game Theory and Grammatical Inference
Oct 05, 2012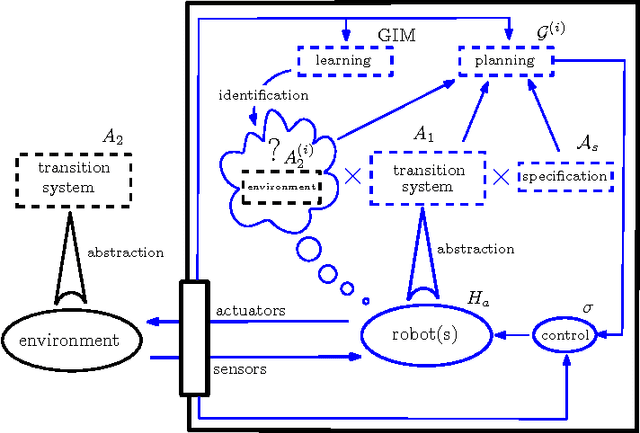
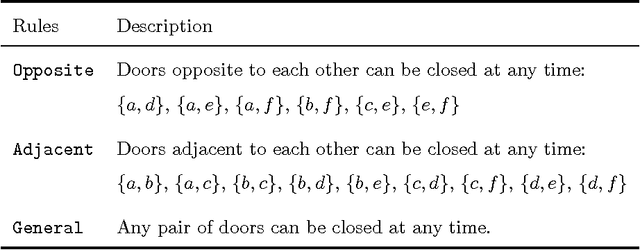
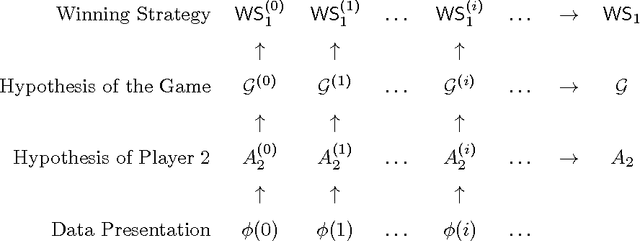

This paper presents an approach that brings together game theory with grammatical inference and discrete abstractions in order to synthesize control strategies for hybrid dynamical systems performing tasks in partially unknown but rule-governed adversarial environments. The combined formulation guarantees that a system specification is met if (a) the true model of the environment is in the class of models inferable from a positive presentation, (b) a characteristic sample is observed, and (c) the task specification is satisfiable given the capabilities of the system (agent) and the environment.
Via