 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCluster-Specific Predictive Modeling: A Scalable Solution for Resource-Constrained Wi-Fi Controllers
Mar 23, 2026This manuscript presents a comprehensive analysis of predictive modeling optimization in managed Wi-Fi networks through the integration of clustering algorithms and model evaluation techniques. The study addresses the challenges of deploying forecasting algorithms in large-scale environments managed by a central controller constrained by memory and computational resources. Feature-based clustering, supported by Principal Component Analysis (PCA) and advanced feature engineering, is employed to group time series data based on shared characteristics, enabling the development of cluster-specific predictive models. Comparative evaluations between global models (GMs) and cluster-specific models demonstrate that cluster-specific models consistently achieve superior accuracy in terms of Mean Absolute Error (MAE) values in high-activity clusters. The trade-offs between model complexity (and accuracy) and resource utilization are analyzed, highlighting the scalability of tailored modeling approaches. The findings advocate for adaptive network management strategies that optimize resource allocation through selective model deployment, enhance predictive accuracy, and ensure scalable operations in large-scale, centrally managed Wi-Fi environments.
Large-Scale AI in Telecom: Charting the Roadmap for Innovation, Scalability, and Enhanced Digital Experiences
Mar 06, 2025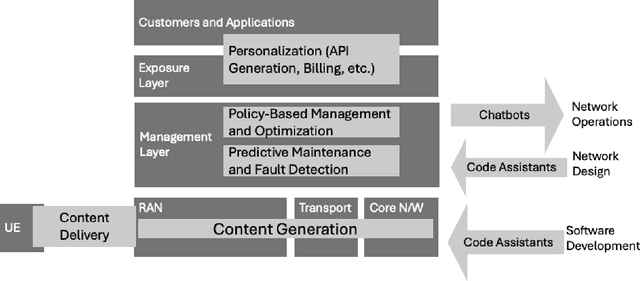
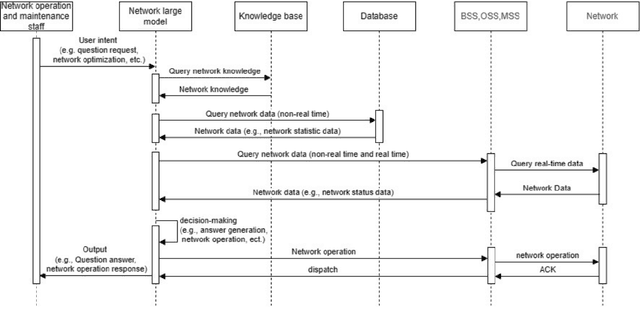
This white paper discusses the role of large-scale AI in the telecommunications industry, with a specific focus on the potential of generative AI to revolutionize network functions and user experiences, especially in the context of 6G systems. It highlights the development and deployment of Large Telecom Models (LTMs), which are tailored AI models designed to address the complex challenges faced by modern telecom networks. The paper covers a wide range of topics, from the architecture and deployment strategies of LTMs to their applications in network management, resource allocation, and optimization. It also explores the regulatory, ethical, and standardization considerations for LTMs, offering insights into their future integration into telecom infrastructure. The goal is to provide a comprehensive roadmap for the adoption of LTMs to enhance scalability, performance, and user-centric innovation in telecom networks.
Energy Consumption Reduction for UAV Trajectory Training : A Transfer Learning Approach
Jan 20, 2025The advent of 6G technology demands flexible, scalable wireless architectures to support ultra-low latency, high connectivity, and high device density. The Open Radio Access Network (O-RAN) framework, with its open interfaces and virtualized functions, provides a promising foundation for such architectures. However, traditional fixed base stations alone are not sufficient to fully capitalize on the benefits of O-RAN due to their limited flexibility in responding to dynamic network demands. The integration of Unmanned Aerial Vehicles (UAVs) as mobile RUs within the O-RAN architecture offers a solution by leveraging the flexibility of drones to dynamically extend coverage. However, UAV operating in diverse environments requires frequent retraining, leading to significant energy waste. We proposed transfer learning based on Dueling Double Deep Q network (DDQN) with multi-step learning, which significantly reduces the training time and energy consumption required for UAVs to adapt to new environments. We designed simulation environments and conducted ray tracing experiments using Wireless InSite with real-world map data. In the two simulated environments, training energy consumption was reduced by 30.52% and 58.51%, respectively. Furthermore, tests on real-world maps of Ottawa and Rosslyn showed energy reductions of 44.85% and 36.97%, respectively.
A Deep-NN Beamforming Approach for Dual Function Radar-Communication THz UAV
May 27, 2024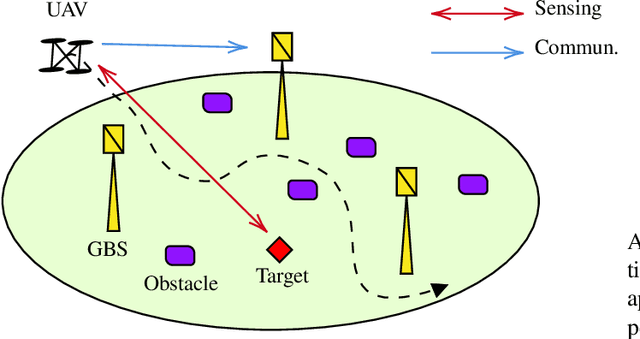
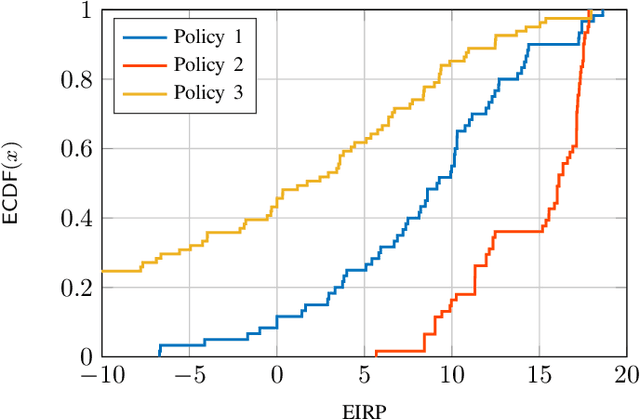
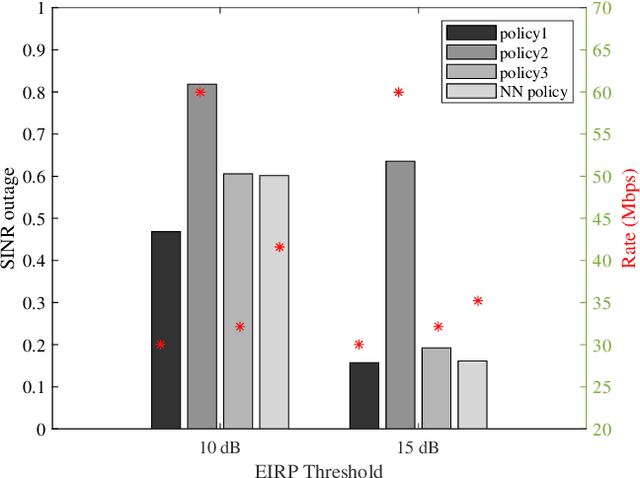
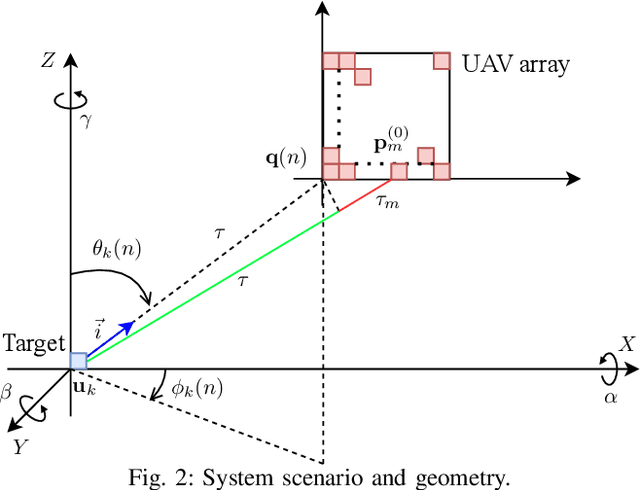
In this paper, we consider a scenario with one UAV equipped with a ULA, which sends combined information and sensing signals to communicate with multiple GBS and, at the same time, senses potential targets placed within an interested area on the ground. We aim to jointly design the transmit beamforming with the GBS association to optimize communication performance while ensuring high sensing accuracy. We propose a predictive beamforming framework based on a dual DNN solution to solve the formulated nonconvex optimization problem. A first DNN is trained to produce the required beamforming matrix for any point of the UAV flying area in a reduced time compared to state-of-the-art beamforming optimizers. A second DNN is trained to learn the optimal mapping from the input features, power, and EIRP constraints to the GBS association decision. Finally, we provide an extensive simulation analysis to corroborate the proposed approach and show the benefits of EIRP, SINR performance and computational speed.
Continuous Transfer Learning for UAV Communication-aware Trajectory Design
May 16, 2024
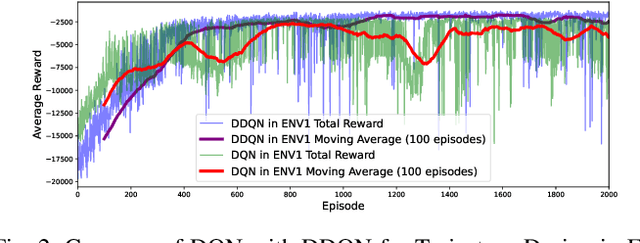
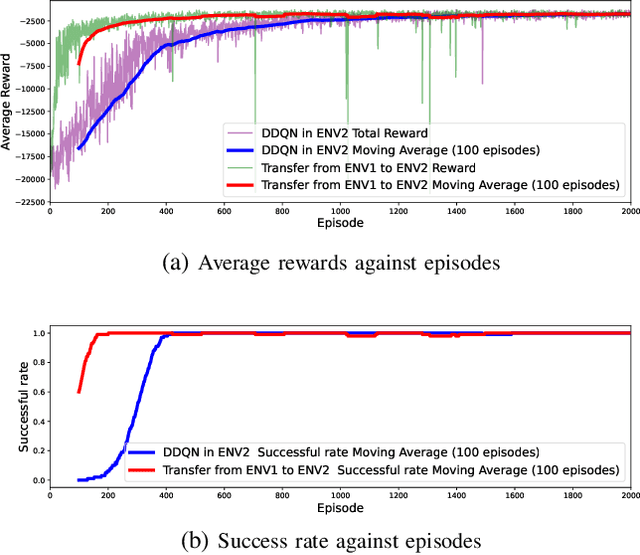
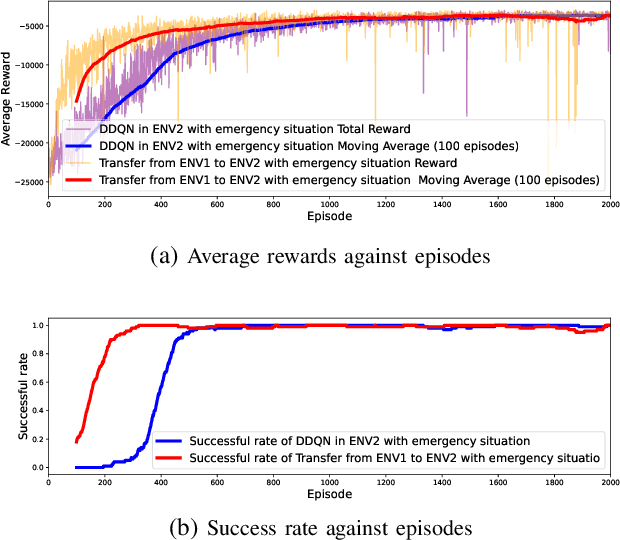
Deep Reinforcement Learning (DRL) emerges as a prime solution for Unmanned Aerial Vehicle (UAV) trajectory planning, offering proficiency in navigating high-dimensional spaces, adaptability to dynamic environments, and making sequential decisions based on real-time feedback. Despite these advantages, the use of DRL for UAV trajectory planning requires significant retraining when the UAV is confronted with a new environment, resulting in wasted resources and time. Therefore, it is essential to develop techniques that can reduce the overhead of retraining DRL models, enabling them to adapt to constantly changing environments. This paper presents a novel method to reduce the need for extensive retraining using a double deep Q network (DDQN) model as a pretrained base, which is subsequently adapted to different urban environments through Continuous Transfer Learning (CTL). Our method involves transferring the learned model weights and adapting the learning parameters, including the learning and exploration rates, to suit each new environment specific characteristics. The effectiveness of our approach is validated in three scenarios, each with different levels of similarity. CTL significantly improves learning speed and success rates compared to DDQN models initiated from scratch. For similar environments, Transfer Learning (TL) improved stability, accelerated convergence by 65%, and facilitated 35% faster adaptation in dissimilar settings.
Continuous Multi-Link Operation: A Contention-Free Mechanism for the Unlicensed Spectrum
May 15, 2024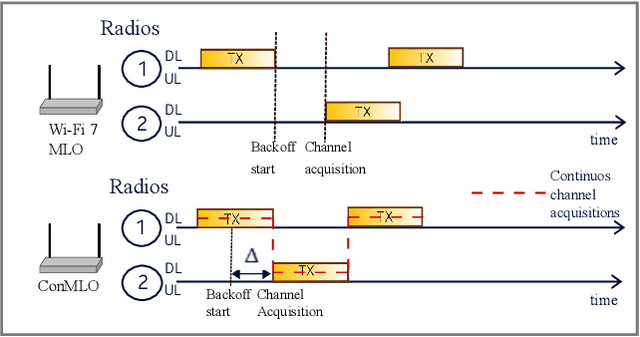
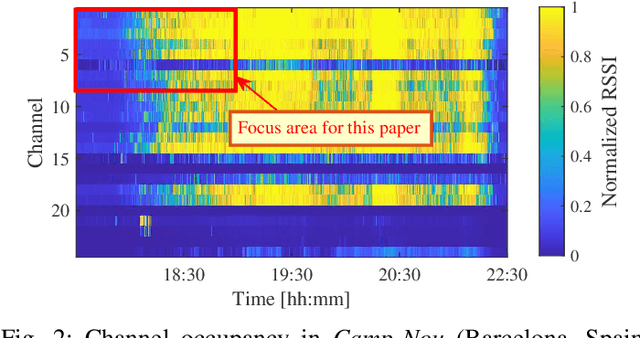
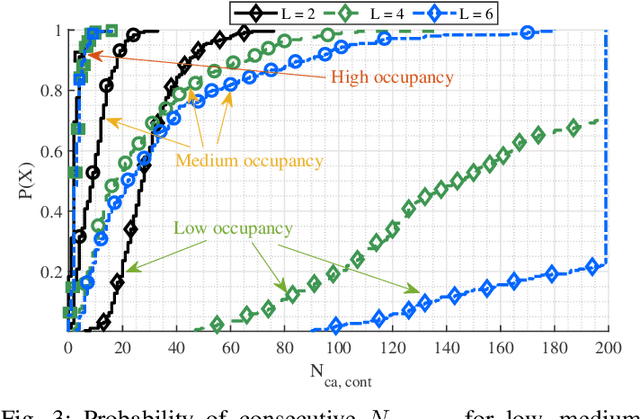
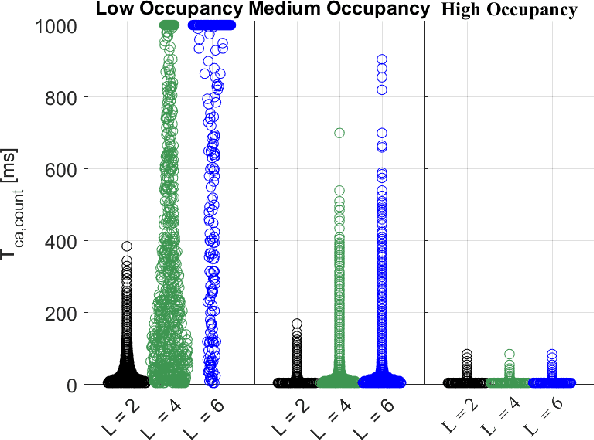
This paper proposes a novel mechanism to enforce contention-free channel access in the unlicensed spectrum, as opposed to the traditional contention-based approach. To achieve this objective, we build on the Wi-Fi~7 multi-link operation (MLO) and define the means whereby independent channel access attempts are performed in all the addressable links to ensure one available channel/link is ready for transmission at all times, such that a sequence of continuous acquired channels can be maintained. We call this method continuous multi-link operation (ConMLO). In this work, we aim to verify the applicability of ConMLO, its ability to retain spectrum resources for a given duration of time, and its fairness with respect existing approaches, namely legacy single-link operation (SLO) and MLO. To this end, we use realistic data traffic measurements acquired in a crowded football stadium as an exemplary case of challenging spectrum occupation. Our results show that the proposed ConMLO can effectively guarantee continuous channel acquisition under different occupancy scenarios without compromising fairness of channel access compared to existing legacy modes.
AI/ML-based Load Prediction in IEEE 802.11 Enterprise Networks
Oct 11, 2023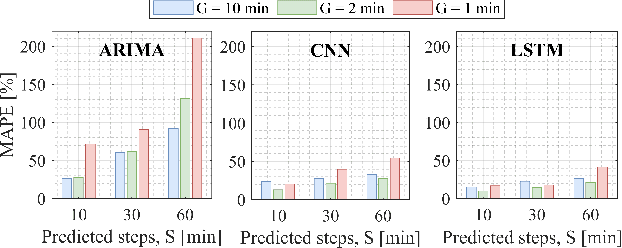
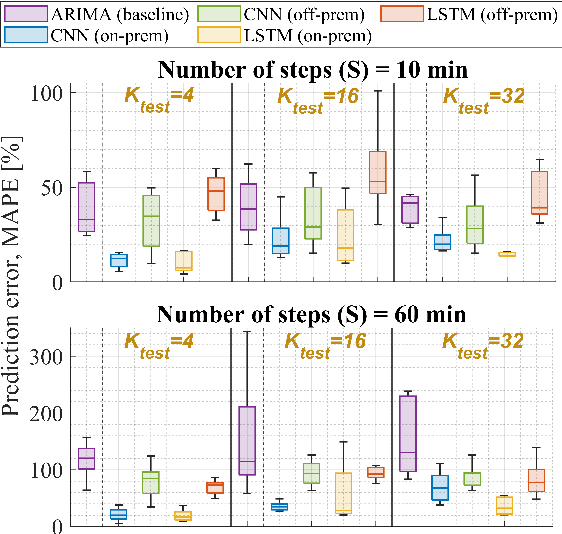
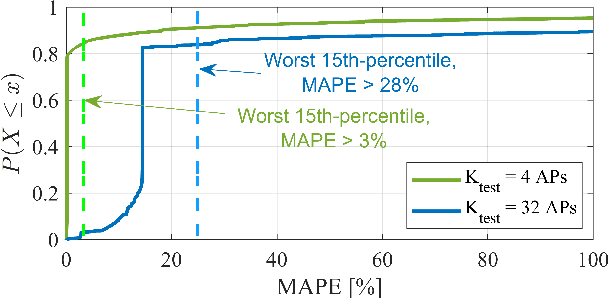
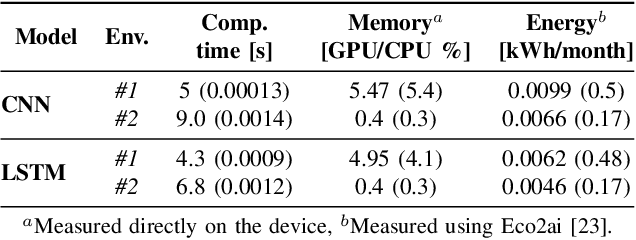
Enterprise Wi-Fi networks can greatly benefit from Artificial Intelligence and Machine Learning (AI/ML) thanks to their well-developed management and operation capabilities. At the same time, AI/ML-based traffic/load prediction is one of the most appealing data-driven solutions to improve the Wi-Fi experience, either through the enablement of autonomous operation or by boosting troubleshooting with forecasted network utilization. In this paper, we study the suitability and feasibility of adopting AI/ML-based load prediction in practical enterprise Wi-Fi networks. While leveraging AI/ML solutions can potentially contribute to optimizing Wi-Fi networks in terms of energy efficiency, performance, and reliability, their effective adoption is constrained to aspects like data availability and quality, computational capabilities, and energy consumption. Our results show that hardware-constrained AI/ML models can potentially predict network load with less than 20% average error and 3% 85th-percentile error, which constitutes a suitable input for proactively driving Wi-Fi network optimization.
Throughput Analysis of IEEE 802.11bn Coordinated Spatial Reuse
Sep 17, 2023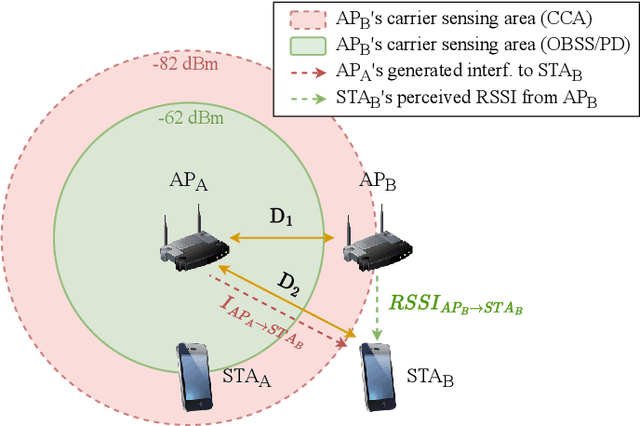
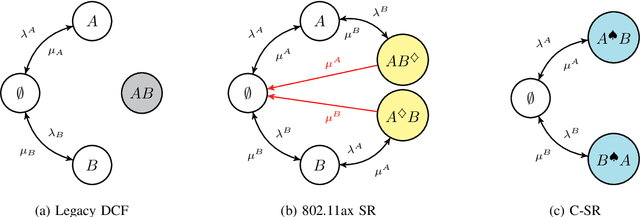
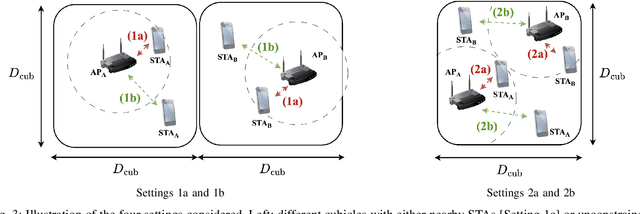
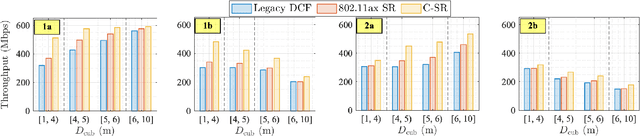
Multi-Access Point Coordination (MAPC) is becoming the cornerstone of the IEEE 802.11bn amendment, alias Wi-Fi 8. Among the MAPC features, Coordinated Spatial Reuse (C-SR) stands as one of the most appealing due to its capability to orchestrate simultaneous access point transmissions at a low implementation complexity. In this paper, we contribute to the understanding of C-SR by introducing an analytical model based on Continuous Time Markov Chains (CTMCs) to characterize its throughput and spatial efficiency. Applying the proposed model to several network topologies, we show that C-SR opportunistically enables parallel high-quality transmissions and yields an average throughput gain of up to 59% in comparison to the legacy 802.11 Distributed Coordination Function (DCF) and up to 42% when compared to the 802.11ax Overlapping Basic Service Set Packet Detect (OBSS/PD) mechanism.
A Transfer Learning Approach for UAV Path Design with Connectivity Outage Constraint
Nov 07, 2022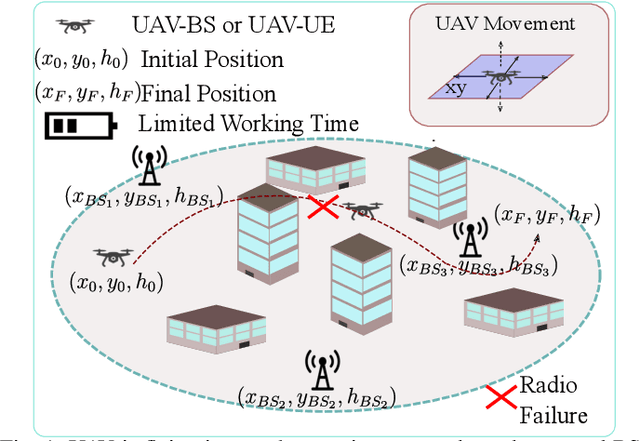
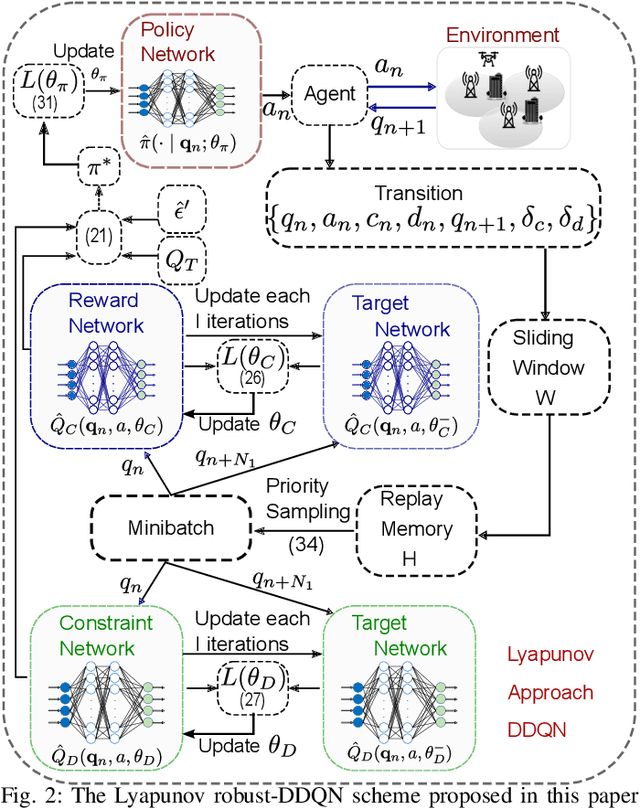
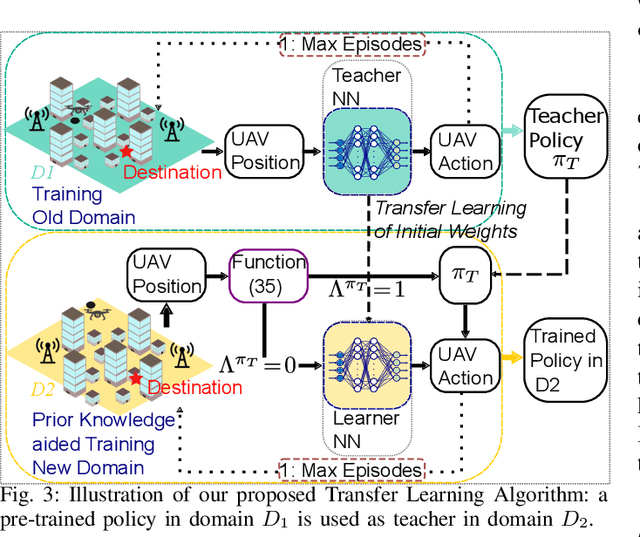
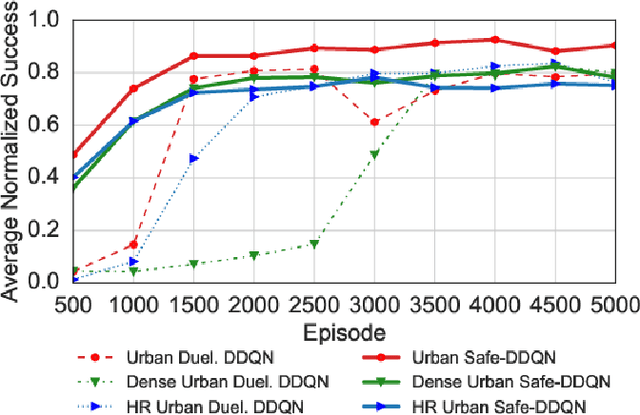
The connectivity-aware path design is crucial in the effective deployment of autonomous Unmanned Aerial Vehicles (UAVs). Recently, Reinforcement Learning (RL) algorithms have become the popular approach to solving this type of complex problem, but RL algorithms suffer slow convergence. In this paper, we propose a Transfer Learning (TL) approach, where we use a teacher policy previously trained in an old domain to boost the path learning of the agent in the new domain. As the exploration processes and the training continue, the agent refines the path design in the new domain based on the subsequent interactions with the environment. We evaluate our approach considering an old domain at sub-6 GHz and a new domain at millimeter Wave (mmWave). The teacher path policy, previously trained at sub-6 GHz path, is the solution to a connectivity-aware path problem that we formulate as a constrained Markov Decision Process (CMDP). We employ a Lyapunov-based model-free Deep Q-Network (DQN) to solve the path design at sub-6 GHz that guarantees connectivity constraint satisfaction. We empirically demonstrate the effectiveness of our approach for different urban environment scenarios. The results demonstrate that our proposed approach is capable of reducing the training time considerably at mmWave.
Deep Reinforcement Learning for Dynamic Band Switch in Cellular-Connected UAV
Aug 26, 2021The choice of the transmitting frequency to provide cellular-connected Unmanned Aerial Vehicle (UAV) reliable connectivity and mobility support introduce several challenges. Conventional sub-6 GHz networks are optimized for ground Users (UEs). Operating at the millimeter Wave (mmWave) band would provide high-capacity but highly intermittent links. To reach the destination while minimizing a weighted function of traveling time and number of radio failures, we propose in this paper a UAV joint trajectory and band switch approach. By leveraging Double Deep Q-Learning we develop two different approaches to learn a trajectory besides managing the band switch. A first blind approach switches the band along the trajectory anytime the UAV-UE throughput is below a predefined threshold. In addition, we propose a smart approach for simultaneous learning-based path planning of UAV and band switch. The two approaches are compared with an optimal band switch strategy in terms of radio failure and band switches for different thresholds. Results reveal that the smart approach is able in a high threshold regime to reduce the number of radio failures and band switches while reaching the desired destination.