 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Transfer Learning Approach for UAV Path Design with Connectivity Outage Constraint
Nov 07, 2022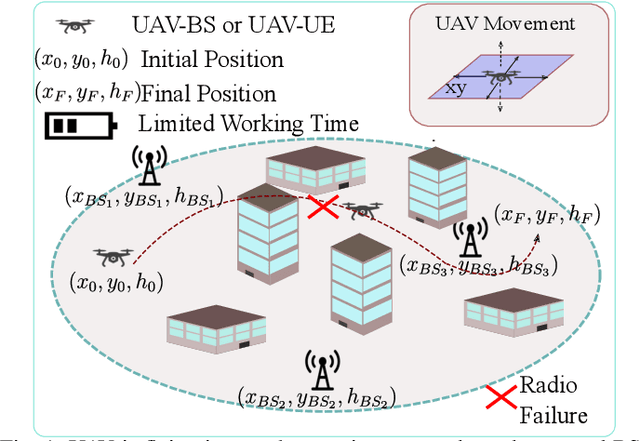
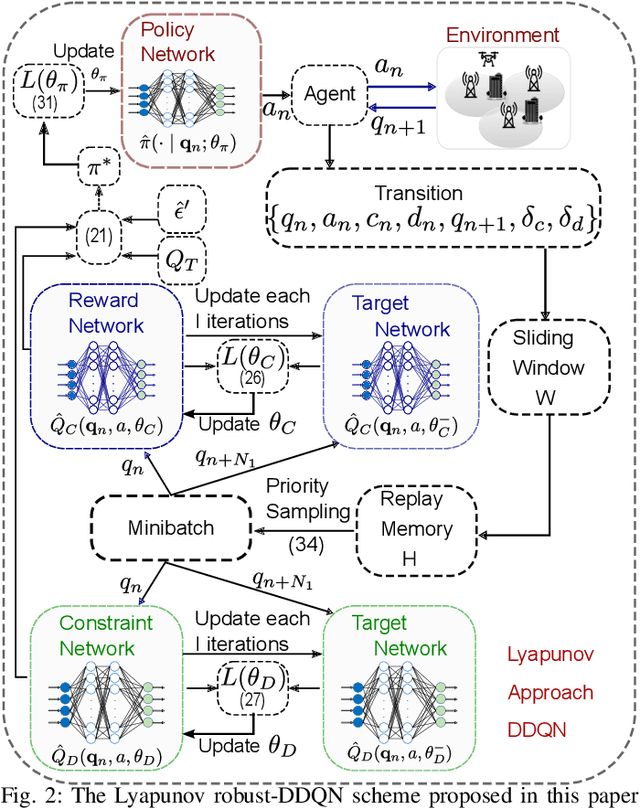
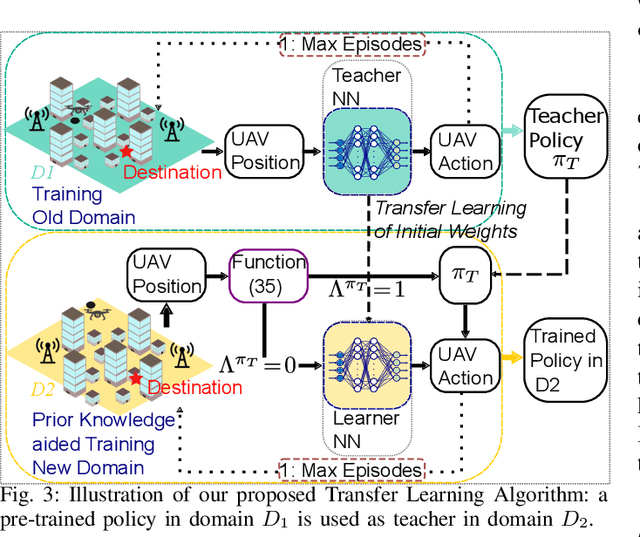
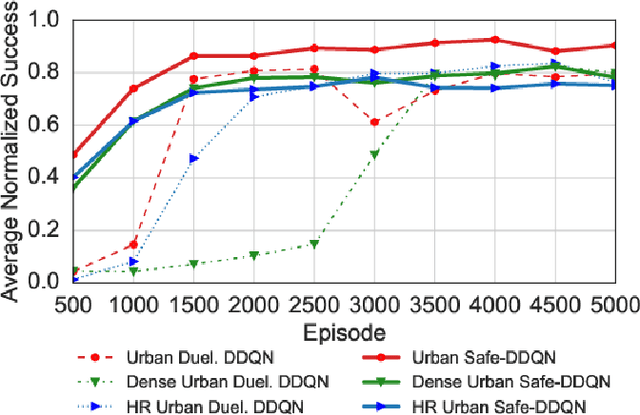
The connectivity-aware path design is crucial in the effective deployment of autonomous Unmanned Aerial Vehicles (UAVs). Recently, Reinforcement Learning (RL) algorithms have become the popular approach to solving this type of complex problem, but RL algorithms suffer slow convergence. In this paper, we propose a Transfer Learning (TL) approach, where we use a teacher policy previously trained in an old domain to boost the path learning of the agent in the new domain. As the exploration processes and the training continue, the agent refines the path design in the new domain based on the subsequent interactions with the environment. We evaluate our approach considering an old domain at sub-6 GHz and a new domain at millimeter Wave (mmWave). The teacher path policy, previously trained at sub-6 GHz path, is the solution to a connectivity-aware path problem that we formulate as a constrained Markov Decision Process (CMDP). We employ a Lyapunov-based model-free Deep Q-Network (DQN) to solve the path design at sub-6 GHz that guarantees connectivity constraint satisfaction. We empirically demonstrate the effectiveness of our approach for different urban environment scenarios. The results demonstrate that our proposed approach is capable of reducing the training time considerably at mmWave.
Deep Reinforcement Learning for Dynamic Band Switch in Cellular-Connected UAV
Aug 26, 2021The choice of the transmitting frequency to provide cellular-connected Unmanned Aerial Vehicle (UAV) reliable connectivity and mobility support introduce several challenges. Conventional sub-6 GHz networks are optimized for ground Users (UEs). Operating at the millimeter Wave (mmWave) band would provide high-capacity but highly intermittent links. To reach the destination while minimizing a weighted function of traveling time and number of radio failures, we propose in this paper a UAV joint trajectory and band switch approach. By leveraging Double Deep Q-Learning we develop two different approaches to learn a trajectory besides managing the band switch. A first blind approach switches the band along the trajectory anytime the UAV-UE throughput is below a predefined threshold. In addition, we propose a smart approach for simultaneous learning-based path planning of UAV and band switch. The two approaches are compared with an optimal band switch strategy in terms of radio failure and band switches for different thresholds. Results reveal that the smart approach is able in a high threshold regime to reduce the number of radio failures and band switches while reaching the desired destination.