 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Movement Detection with Dirichlet Process Mixture Models and Electromyography
Feb 15, 2023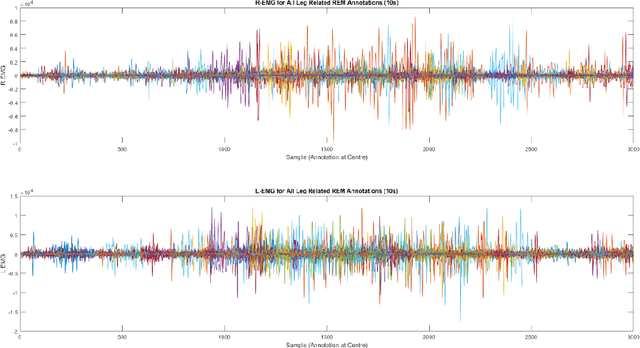
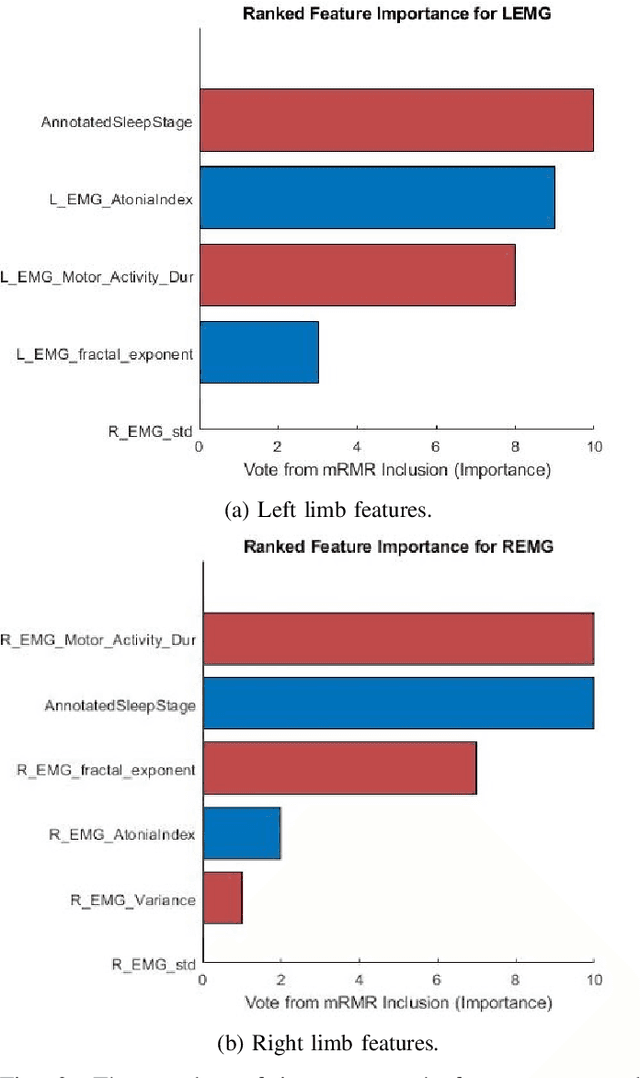
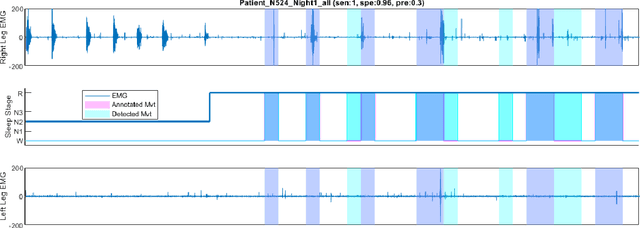

Numerous sleep disorders are characterised by movement during sleep, these include rapid-eye movement sleep behaviour disorder (RBD) and periodic limb movement disorder. The process of diagnosing movement related sleep disorders requires laborious and time-consuming visual analysis of sleep recordings. This process involves sleep clinicians visually inspecting electromyogram (EMG) signals to identify abnormal movements. The distribution of characteristics that represent movement can be diverse and varied, ranging from brief moments of tensing to violent outbursts. This study proposes a framework for automated limb-movement detection by fusing data from two EMG sensors (from the left and right limb) through a Dirichlet process mixture model. Several features are extracted from 10 second mini-epochs, where each mini-epoch has been classified as 'leg-movement' or 'no leg-movement' based on annotations of movement from sleep clinicians. The distributions of the features from each category can be estimated accurately using Gaussian mixture models with the Dirichlet process as a prior. The available dataset includes 36 participants that have all been diagnosed with RBD. The performance of this framework was evaluated by a 10-fold cross validation scheme (participant independent). The study was compared to a random forest model and outperformed it with a mean accuracy, sensitivity, and specificity of 94\%, 48\%, and 95\%, respectively. These results demonstrate the ability of this framework to automate the detection of limb movement for the potential application of assisting clinical diagnosis and decision-making.
A Transfer Learning Approach for UAV Path Design with Connectivity Outage Constraint
Nov 07, 2022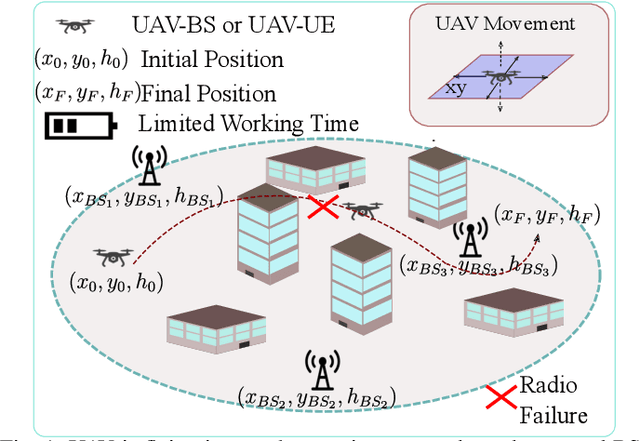
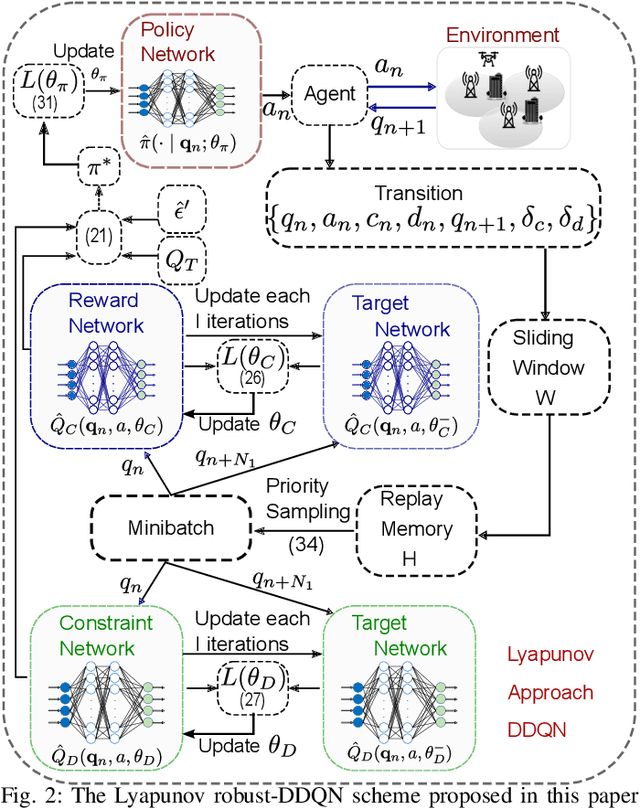
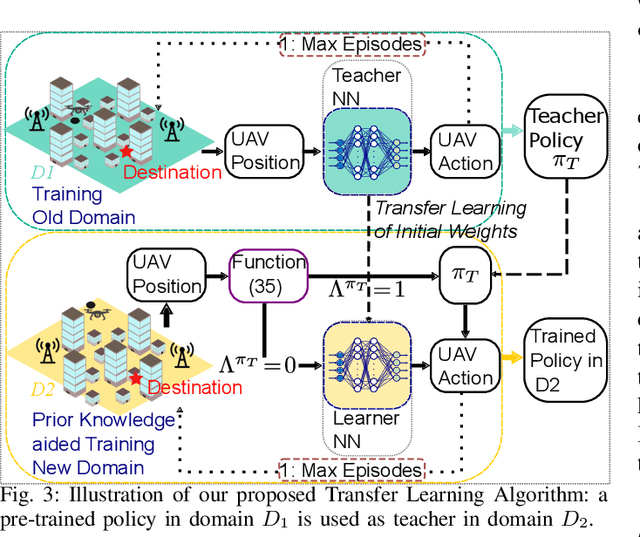
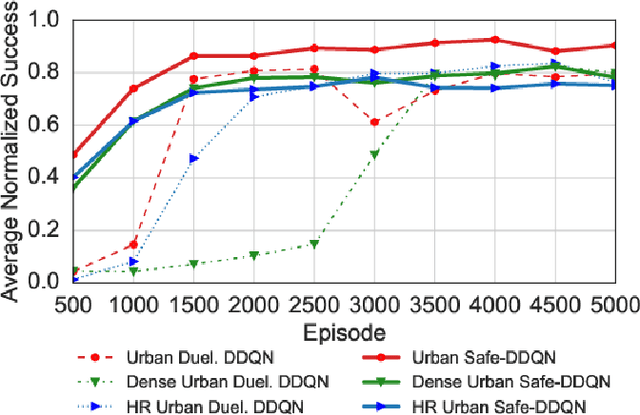
The connectivity-aware path design is crucial in the effective deployment of autonomous Unmanned Aerial Vehicles (UAVs). Recently, Reinforcement Learning (RL) algorithms have become the popular approach to solving this type of complex problem, but RL algorithms suffer slow convergence. In this paper, we propose a Transfer Learning (TL) approach, where we use a teacher policy previously trained in an old domain to boost the path learning of the agent in the new domain. As the exploration processes and the training continue, the agent refines the path design in the new domain based on the subsequent interactions with the environment. We evaluate our approach considering an old domain at sub-6 GHz and a new domain at millimeter Wave (mmWave). The teacher path policy, previously trained at sub-6 GHz path, is the solution to a connectivity-aware path problem that we formulate as a constrained Markov Decision Process (CMDP). We employ a Lyapunov-based model-free Deep Q-Network (DQN) to solve the path design at sub-6 GHz that guarantees connectivity constraint satisfaction. We empirically demonstrate the effectiveness of our approach for different urban environment scenarios. The results demonstrate that our proposed approach is capable of reducing the training time considerably at mmWave.