 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRewarding DINO: Predicting Dense Rewards with Vision Foundation Models
Mar 17, 2026Well-designed dense reward functions in robot manipulation not only indicate whether a task is completed but also encode progress along the way. Generally, designing dense rewards is challenging and usually requires access to privileged state information available only in simulation, not in real-world experiments. This makes reward prediction models that infer task state information from camera images attractive. A common approach is to predict rewards from expert demonstrations based on visual similarity or sequential frame ordering. However, this biases the resulting reward function towards a specific solution and leaves it undefined in states not covered by the demonstrations. In this work, we introduce Rewarding DINO, a method for language-conditioned reward modeling that learns actual reward functions rather than specific trajectories. The model's compact size allows it to serve as a direct replacement for analytical reward functions with comparatively low computational overhead. We train our model on data sampled from 24 Meta-World+ tasks using a rank-based loss and evaluate pairwise accuracy, rank correlation, and calibration. Rewarding DINO achieves competitive performance in tasks from the training set and generalizes to new settings in simulation and the real world, indicating that it learns task semantics. We also test the model with off-the-shelf reinforcement learning algorithms to solve tasks from our Meta-World+ training set.
FlowTouch: View-Invariant Visuo-Tactile Prediction
Mar 09, 2026Tactile sensation is essential for contact-rich manipulation tasks. It provides direct feedback on object geometry, surface properties, and interaction forces, enhancing perception and enabling fine-grained control. An inherent limitation of tactile sensors is that readings are available only when an object is touched. This precludes their use during planning and the initial execution phase of a task. Predicting tactile information from visual information can bridge this gap. A common approach is to learn a direct mapping from camera images to the output of vision-based tactile sensors. However, the resulting model will depend strongly on the specific setup and on how well the camera can capture the area where an object is touched. In this work, we introduce FlowTouch, a novel model for view-invariant visuo-tactile prediction. Our key idea is to use an object's local 3D mesh to encode rich information for predicting tactile patterns while abstracting away from scene-dependent details. FlowTouch integrates scene reconstruction and Flow Matching-based models for image generation. Our results show that FlowTouch is able to bridge the sim-to-real gap and generalize to new sensor instances. We further show that the resulting tactile images can be used for downstream grasp stability prediction. Our code, datasets and videos are available at https://flowtouch.github.io/
VLAgents: A Policy Server for Efficient VLA Inference
Jan 16, 2026The rapid emergence of Vision-Language-Action models (VLAs) has a significant impact on robotics. However, their deployment remains complex due to the fragmented interfaces and the inherent communication latency in distributed setups. To address this, we introduce VLAgents, a modular policy server that abstracts VLA inferencing behind a unified Gymnasium-style protocol. Crucially, its communication layer transparently adapts to the context by supporting both zero-copy shared memory for high-speed simulation and compressed streaming for remote hardware. In this work, we present the architecture of VLAgents and validate it by integrating seven policies -- including OpenVLA and Pi Zero. In a benchmark with both local and remote communication, we further demonstrate how it outperforms the default policy servers provided by OpenVLA, OpenPi, and LeRobot. VLAgents is available at https://github.com/RobotControlStack/vlagents
Robot Control Stack: A Lean Ecosystem for Robot Learning at Scale
Sep 18, 2025



Vision-Language-Action models (VLAs) mark a major shift in robot learning. They replace specialized architectures and task-tailored components of expert policies with large-scale data collection and setup-specific fine-tuning. In this machine learning-focused workflow that is centered around models and scalable training, traditional robotics software frameworks become a bottleneck, while robot simulations offer only limited support for transitioning from and to real-world experiments. In this work, we close this gap by introducing Robot Control Stack (RCS), a lean ecosystem designed from the ground up to support research in robot learning with large-scale generalist policies. At its core, RCS features a modular and easily extensible layered architecture with a unified interface for simulated and physical robots, facilitating sim-to-real transfer. Despite its minimal footprint and dependencies, it offers a complete feature set, enabling both real-world experiments and large-scale training in simulation. Our contribution is twofold: First, we introduce the architecture of RCS and explain its design principles. Second, we evaluate its usability and performance along the development cycle of VLA and RL policies. Our experiments also provide an extensive evaluation of Octo, OpenVLA, and Pi Zero on multiple robots and shed light on how simulation data can improve real-world policy performance. Our code, datasets, weights, and videos are available at: https://robotcontrolstack.github.io/
Augmented Reality for RObots (ARRO): Pointing Visuomotor Policies Towards Visual Robustness
May 13, 2025Visuomotor policies trained on human expert demonstrations have recently shown strong performance across a wide range of robotic manipulation tasks. However, these policies remain highly sensitive to domain shifts stemming from background or robot embodiment changes, which limits their generalization capabilities. In this paper, we present ARRO, a novel calibration-free visual representation that leverages zero-shot open-vocabulary segmentation and object detection models to efficiently mask out task-irrelevant regions of the scene without requiring additional training. By filtering visual distractors and overlaying virtual guides during both training and inference, ARRO improves robustness to scene variations and reduces the need for additional data collection. We extensively evaluate ARRO with Diffusion Policy on several tabletop manipulation tasks in both simulation and real-world environments, and further demonstrate its compatibility and effectiveness with generalist robot policies, such as Octo and OpenVLA. Across all settings in our evaluation, ARRO yields consistent performance gains, allows for selective masking to choose between different objects, and shows robustness even to challenging segmentation conditions. Videos showcasing our results are available at: augmented-reality-for-robots.github.io
LLM-Pack: Intuitive Grocery Handling for Logistics Applications
Mar 11, 2025Robotics and automation are increasingly influential in logistics but remain largely confined to traditional warehouses. In grocery retail, advancements such as cashier-less supermarkets exist, yet customers still manually pick and pack groceries. While there has been a substantial focus in robotics on the bin picking problem, the task of packing objects and groceries has remained largely untouched. However, packing grocery items in the right order is crucial for preventing product damage, e.g., heavy objects should not be placed on top of fragile ones. However, the exact criteria for the right packing order are hard to define, in particular given the huge variety of objects typically found in stores. In this paper, we introduce LLM-Pack, a novel approach for grocery packing. LLM-Pack leverages language and vision foundation models for identifying groceries and generating a packing sequence that mimics human packing strategy. LLM-Pack does not require dedicated training to handle new grocery items and its modularity allows easy upgrades of the underlying foundation models. We extensively evaluate our approach to demonstrate its performance. We will make the source code of LLMPack publicly available upon the publication of this manuscript.
VLM-Vac: Enhancing Smart Vacuums through VLM Knowledge Distillation and Language-Guided Experience Replay
Sep 21, 2024



In this paper, we propose VLM-Vac, a novel framework designed to enhance the autonomy of smart robot vacuum cleaners. Our approach integrates the zero-shot object detection capabilities of a Vision-Language Model (VLM) with a Knowledge Distillation (KD) strategy. By leveraging the VLM, the robot can categorize objects into actionable classes -- either to avoid or to suck -- across diverse backgrounds. However, frequently querying the VLM is computationally expensive and impractical for real-world deployment. To address this issue, we implement a KD process that gradually transfers the essential knowledge of the VLM to a smaller, more efficient model. Our real-world experiments demonstrate that this smaller model progressively learns from the VLM and requires significantly fewer queries over time. Additionally, we tackle the challenge of continual learning in dynamic home environments by exploiting a novel experience replay method based on language-guided sampling. Our results show that this approach is not only energy-efficient but also surpasses conventional vision-based clustering methods, particularly in detecting small objects across diverse backgrounds.
A Review of Safe Reinforcement Learning: Methods, Theory and Applications
May 23, 2022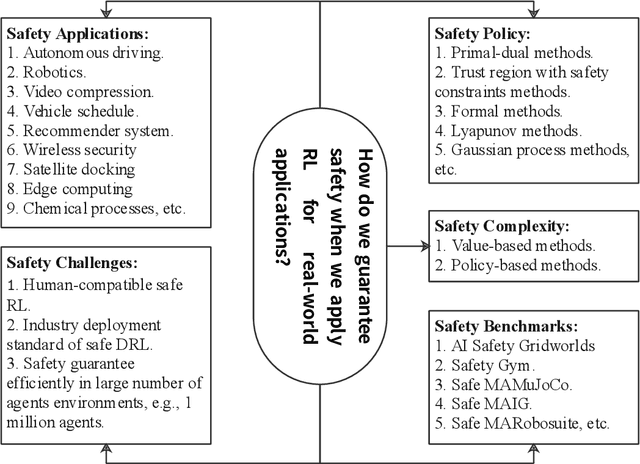
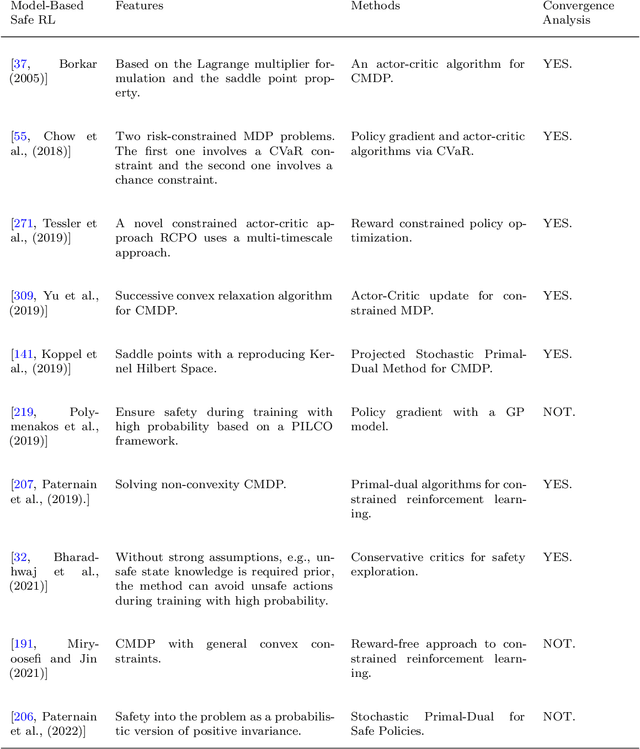
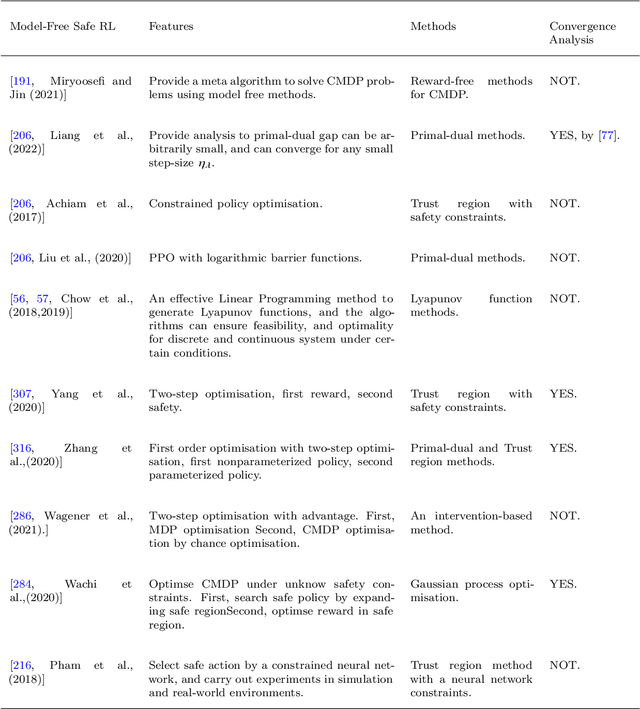
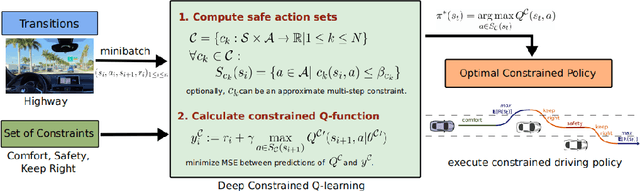
Reinforcement learning has achieved tremendous success in many complex decision making tasks. When it comes to deploying RL in the real world, safety concerns are usually raised, leading to a growing demand for safe reinforcement learning algorithms, such as in autonomous driving and robotics scenarios. While safety control has a long history, the study of safe RL algorithms is still in the early stages. To establish a good foundation for future research in this thread, in this paper, we provide a review for safe RL from the perspectives of methods, theory and applications. Firstly, we review the progress of safe RL from five dimensions and come up with five problems that are crucial for safe RL being deployed in real-world applications, coined as "2H3W". Secondly, we analyze the theory and algorithm progress from the perspectives of answering the "2H3W" problems. Then, the sample complexity of safe RL methods is reviewed and discussed, followed by an introduction of the applications and benchmarks of safe RL algorithms. Finally, we open the discussion of the challenging problems in safe RL, hoping to inspire more future research on this thread. To advance the study of safe RL algorithms, we release a benchmark suite, an open-sourced repository containing the implementations of major safe RL algorithms, along with tutorials at the link: https://github.com/chauncygu/Safe-Reinforcement-Learning-Baselines.git.
Towards Cognitive Navigation: Design and Implementation of a Biologically Inspired Head Direction Cell Network
Sep 22, 2021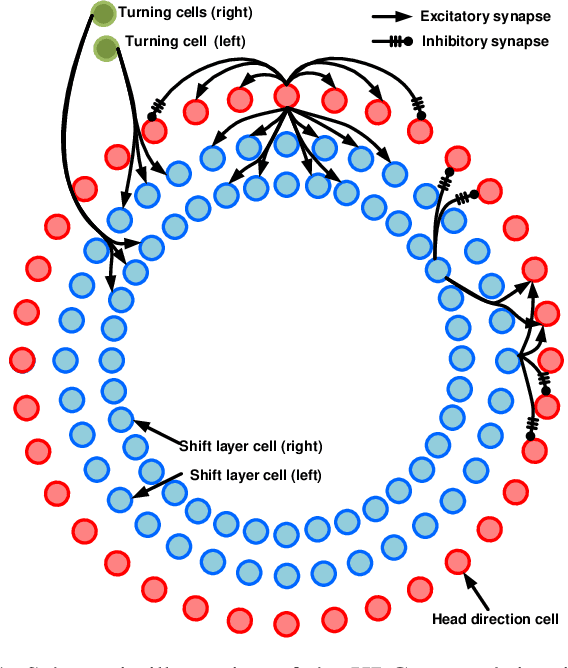
As a vital cognitive function of animals, the navigation skill is first built on the accurate perception of the directional heading in the environment. Head direction cells (HDCs), found in the limbic system of animals, are proven to play an important role in identifying the directional heading allocentrically in the horizontal plane, independent of the animal's location and the ambient conditions of the environment. However, practical HDC models that can be implemented in robotic applications are rarely investigated, especially those that are biologically plausible and yet applicable to the real world. In this paper, we propose a computational HDC network which is consistent with several neurophysiological findings concerning biological HDCs, and then implement it in robotic navigation tasks. The HDC network keeps a representation of the directional heading only relying on the angular velocity as an input. We examine the proposed HDC model in extensive simulations and real-world experiments and demonstrate its excellent performance in terms of accuracy and real-time capability.
Task-Independent Spiking Central Pattern Generator: A Learning-Based Approach
Mar 17, 2020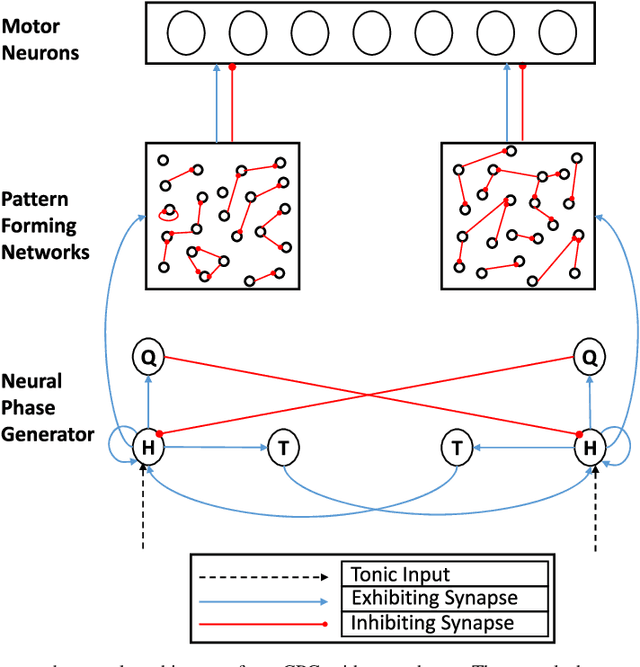
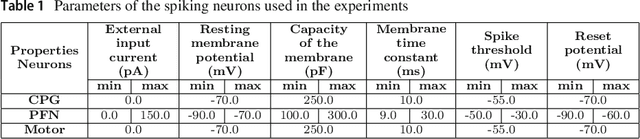
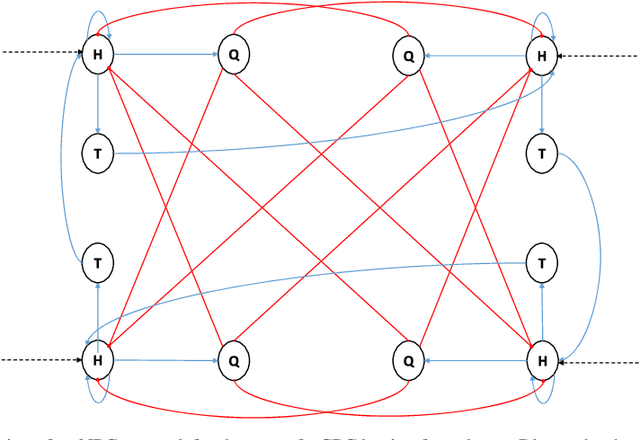
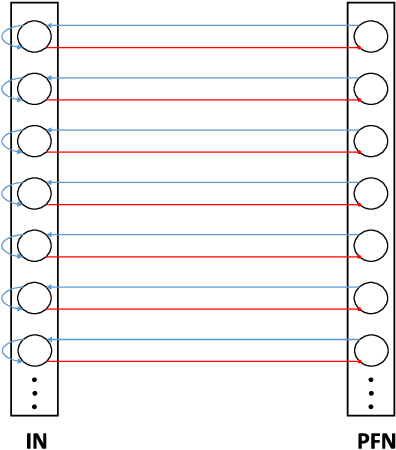
Legged locomotion is a challenging task in the field of robotics but a rather simple one in nature. This motivates the use of biological methodologies as solutions to this problem. Central pattern generators are neural networks that are thought to be responsible for locomotion in humans and some animal species. As for robotics, many attempts were made to reproduce such systems and use them for a similar goal. One interesting design model is based on spiking neural networks. This model is the main focus of this work, as its contribution is not limited to engineering but also applicable to neuroscience. This paper introduces a new general framework for building central pattern generators that are task-independent, biologically plausible, and rely on learning methods. The abilities and properties of the presented approach are not only evaluated in simulation but also in a robotic experiment. The results are very promising as the used robot was able to perform stable walking at different speeds and to change speed within the same gait cycle.