 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLC++: Source-Free Universal Domain Adaptation through Global-Local Clustering and Contrastive Affinity Learning
Mar 21, 2024



Deep neural networks often exhibit sub-optimal performance under covariate and category shifts. Source-Free Domain Adaptation (SFDA) presents a promising solution to this dilemma, yet most SFDA approaches are restricted to closed-set scenarios. In this paper, we explore Source-Free Universal Domain Adaptation (SF-UniDA) aiming to accurately classify "known" data belonging to common categories and segregate them from target-private "unknown" data. We propose a novel Global and Local Clustering (GLC) technique, which comprises an adaptive one-vs-all global clustering algorithm to discern between target classes, complemented by a local k-NN clustering strategy to mitigate negative transfer. Despite the effectiveness, the inherent closed-set source architecture leads to uniform treatment of "unknown" data, impeding the identification of distinct "unknown" categories. To address this, we evolve GLC to GLC++, integrating a contrastive affinity learning strategy. We examine the superiority of GLC and GLC++ across multiple benchmarks and category shift scenarios. Remarkably, in the most challenging open-partial-set scenarios, GLC and GLC++ surpass GATE by 16.7% and 18.6% in H-score on VisDA, respectively. GLC++ enhances the novel category clustering accuracy of GLC by 4.3% in open-set scenarios on Office-Home. Furthermore, the introduced contrastive learning strategy not only enhances GLC but also significantly facilitates existing methodologies.
LEAD: Learning Decomposition for Source-free Universal Domain Adaptation
Mar 06, 2024
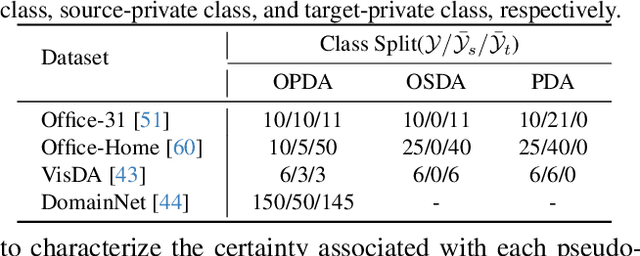
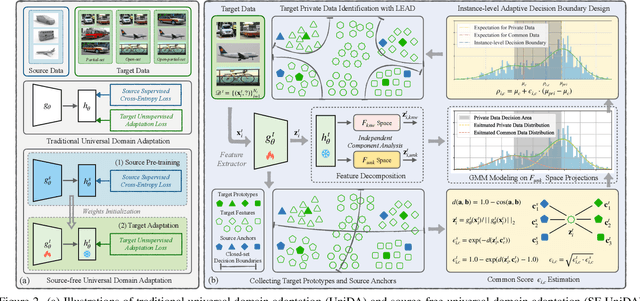
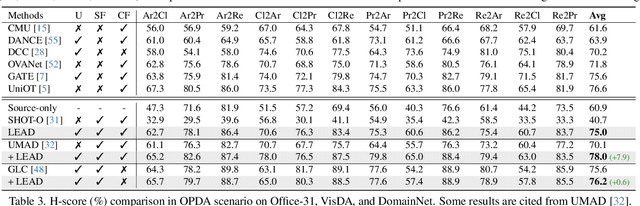
Universal Domain Adaptation (UniDA) targets knowledge transfer in the presence of both covariate and label shifts. Recently, Source-free Universal Domain Adaptation (SF-UniDA) has emerged to achieve UniDA without access to source data, which tends to be more practical due to data protection policies. The main challenge lies in determining whether covariate-shifted samples belong to target-private unknown categories. Existing methods tackle this either through hand-crafted thresholding or by developing time-consuming iterative clustering strategies. In this paper, we propose a new idea of LEArning Decomposition (LEAD), which decouples features into source-known and -unknown components to identify target-private data. Technically, LEAD initially leverages the orthogonal decomposition analysis for feature decomposition. Then, LEAD builds instance-level decision boundaries to adaptively identify target-private data. Extensive experiments across various UniDA scenarios have demonstrated the effectiveness and superiority of LEAD. Notably, in the OPDA scenario on VisDA dataset, LEAD outperforms GLC by 3.5% overall H-score and reduces 75% time to derive pseudo-labeling decision boundaries. Besides, LEAD is also appealing in that it is complementary to most existing methods. The code is available at https://github.com/ispc-lab/LEAD.
Task-Independent Spiking Central Pattern Generator: A Learning-Based Approach
Mar 17, 2020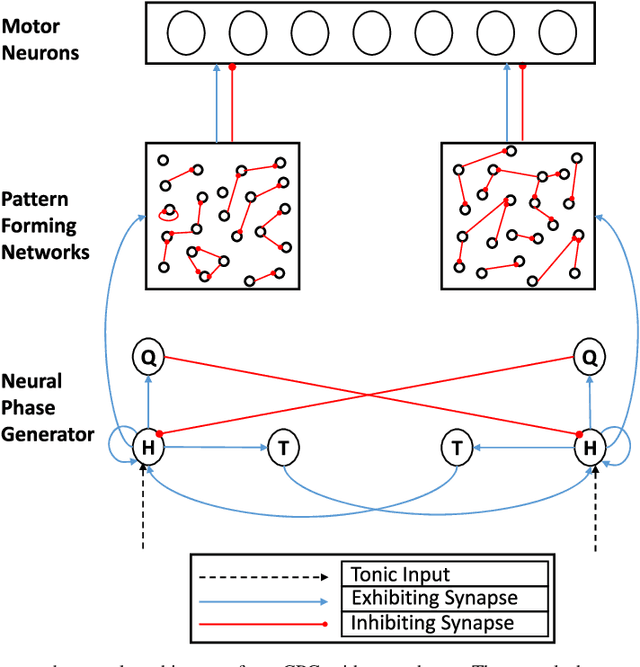
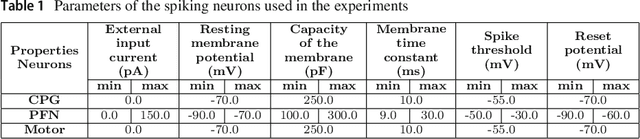
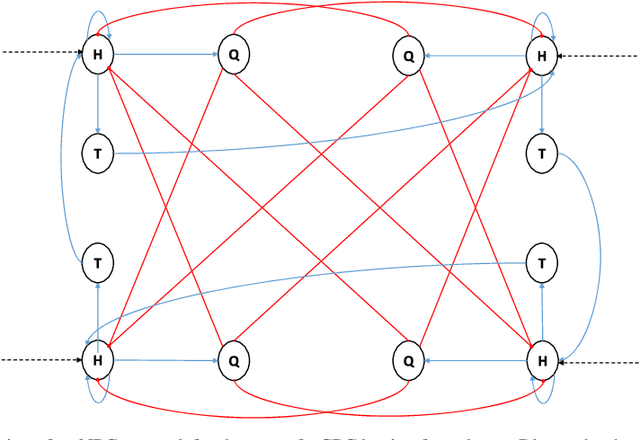
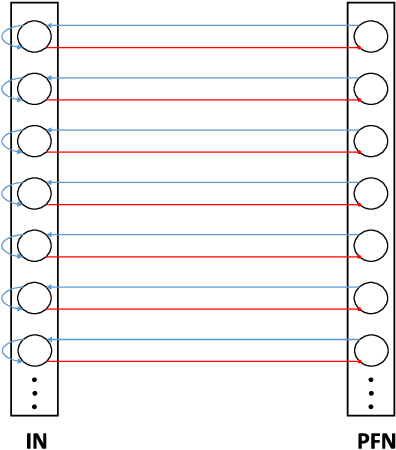
Legged locomotion is a challenging task in the field of robotics but a rather simple one in nature. This motivates the use of biological methodologies as solutions to this problem. Central pattern generators are neural networks that are thought to be responsible for locomotion in humans and some animal species. As for robotics, many attempts were made to reproduce such systems and use them for a similar goal. One interesting design model is based on spiking neural networks. This model is the main focus of this work, as its contribution is not limited to engineering but also applicable to neuroscience. This paper introduces a new general framework for building central pattern generators that are task-independent, biologically plausible, and rely on learning methods. The abilities and properties of the presented approach are not only evaluated in simulation but also in a robotic experiment. The results are very promising as the used robot was able to perform stable walking at different speeds and to change speed within the same gait cycle.
Scalability in Neural Control of Musculoskeletal Robots
Jan 19, 2016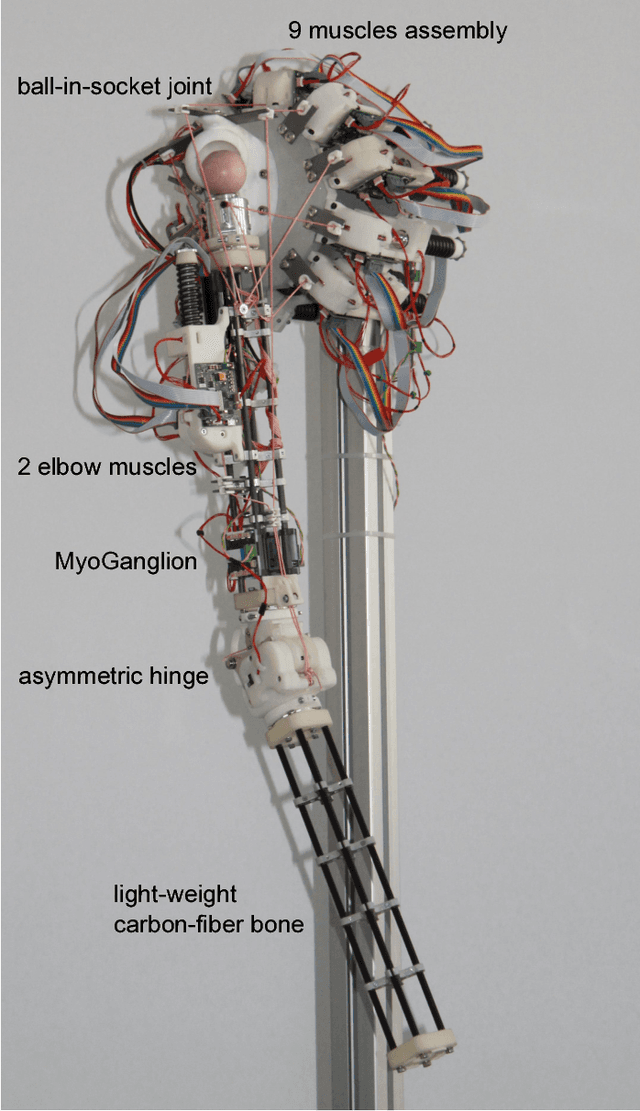
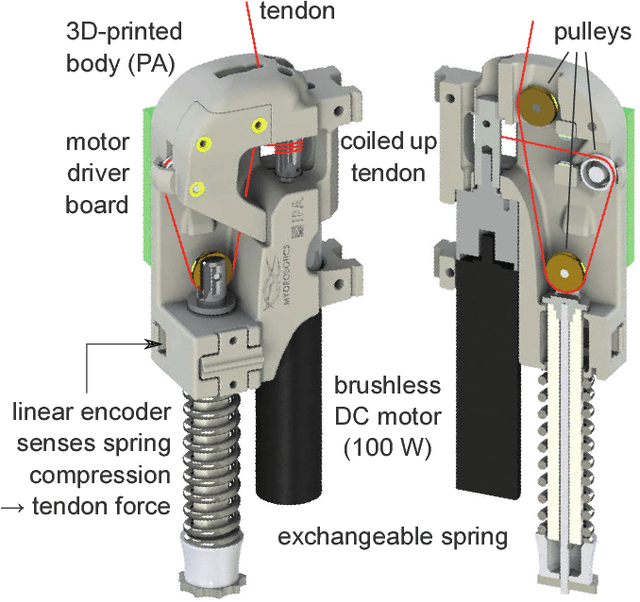
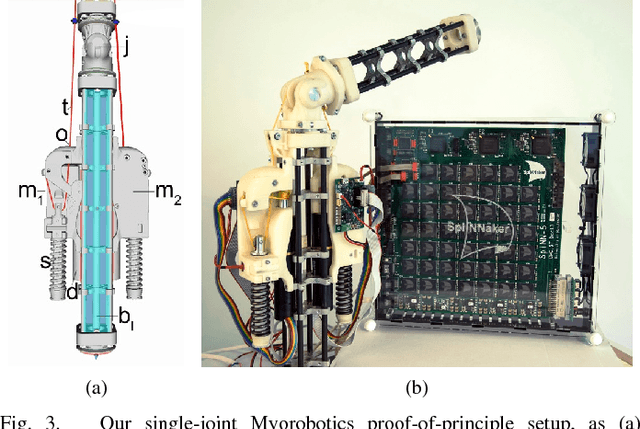
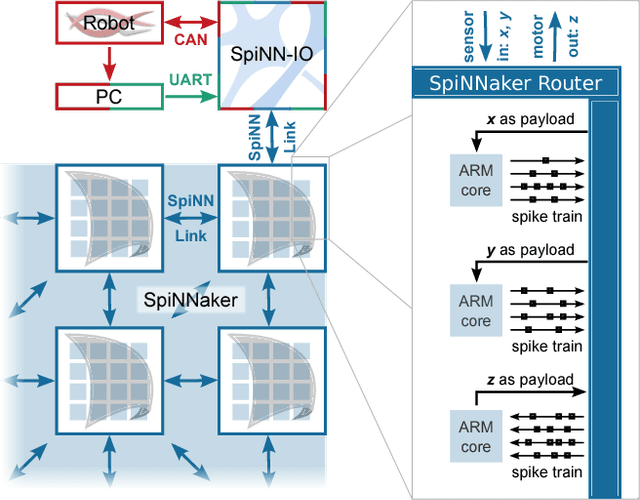
Anthropomimetic robots are robots that sense, behave, interact and feel like humans. By this definition, anthropomimetic robots require human-like physical hardware and actuation, but also brain-like control and sensing. The most self-evident realization to meet those requirements would be a human-like musculoskeletal robot with a brain-like neural controller. While both musculoskeletal robotic hardware and neural control software have existed for decades, a scalable approach that could be used to build and control an anthropomimetic human-scale robot has not been demonstrated yet. Combining Myorobotics, a framework for musculoskeletal robot development, with SpiNNaker, a neuromorphic computing platform, we present the proof-of-principle of a system that can scale to dozens of neurally-controlled, physically compliant joints. At its core, it implements a closed-loop cerebellar model which provides real-time low-level neural control at minimal power consumption and maximal extensibility: higher-order (e.g., cortical) neural networks and neuromorphic sensors like silicon-retinae or -cochleae can naturally be incorporated.