 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGERD: Geometric event response data generation
Dec 04, 2024



Event-based vision sensors are appealing because of their time resolution, higher dynamic range, and low-power consumption. They also provide data that is fundamentally different from conventional frame-based cameras: events are sparse, discrete, and require integration in time. Unlike conventional models grounded in established geometric and physical principles, event-based models lack comparable foundations. We introduce a method to generate event-based data under controlled transformations. Specifically, we subject a prototypical object to transformations that change over time to produce carefully curated event videos. We hope this work simplifies studies for geometric approaches in event-based vision. GERD is available at https://github.com/ncskth/gerd
Covariant spatio-temporal receptive fields for neuromorphic computing
May 01, 2024Biological nervous systems constitute important sources of inspiration towards computers that are faster, cheaper, and more energy efficient. Neuromorphic disciplines view the brain as a coevolved system, simultaneously optimizing the hardware and the algorithms running on it. There are clear efficiency gains when bringing the computations into a physical substrate, but we presently lack theories to guide efficient implementations. Here, we present a principled computational model for neuromorphic systems in terms of spatio-temporal receptive fields, based on affine Gaussian kernels over space and leaky-integrator and leaky integrate-and-fire models over time. Our theory is provably covariant to spatial affine and temporal scaling transformations, and with close similarities to the visual processing in mammalian brains. We use these spatio-temporal receptive fields as a prior in an event-based vision task, and show that this improves the training of spiking networks, which otherwise is known as problematic for event-based vision. This work combines efforts within scale-space theory and computational neuroscience to identify theoretically well-founded ways to process spatio-temporal signals in neuromorphic systems. Our contributions are immediately relevant for signal processing and event-based vision, and can be extended to other processing tasks over space and time, such as memory and control.
Scalability in Neural Control of Musculoskeletal Robots
Jan 19, 2016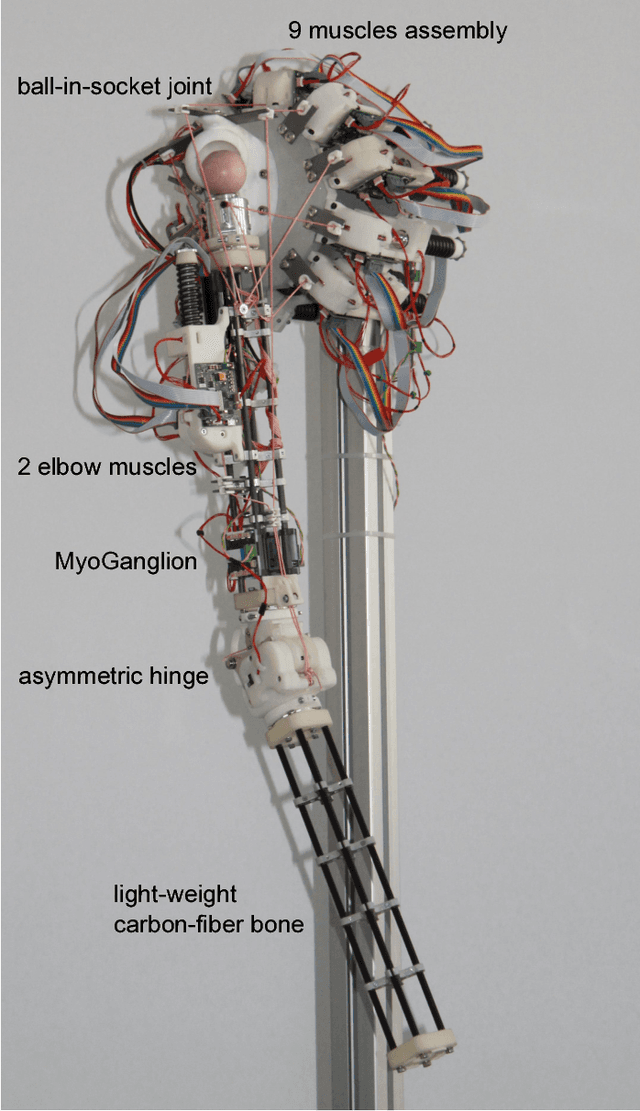
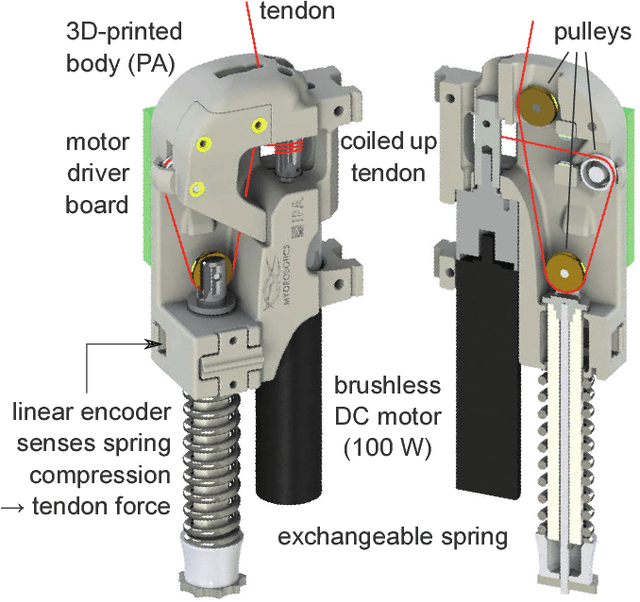
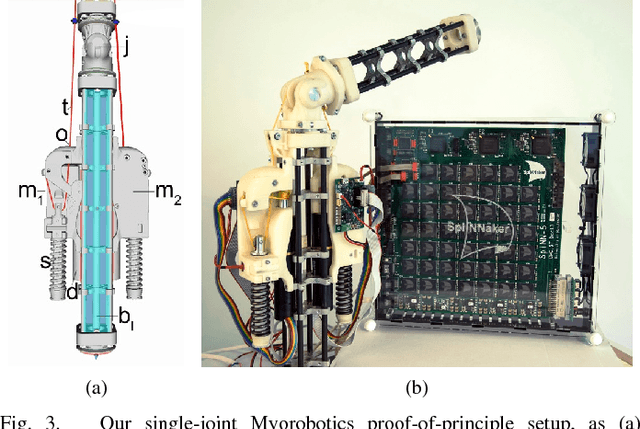
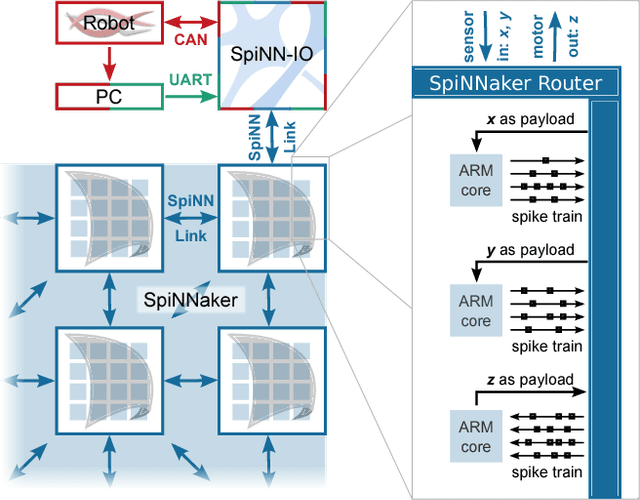
Anthropomimetic robots are robots that sense, behave, interact and feel like humans. By this definition, anthropomimetic robots require human-like physical hardware and actuation, but also brain-like control and sensing. The most self-evident realization to meet those requirements would be a human-like musculoskeletal robot with a brain-like neural controller. While both musculoskeletal robotic hardware and neural control software have existed for decades, a scalable approach that could be used to build and control an anthropomimetic human-scale robot has not been demonstrated yet. Combining Myorobotics, a framework for musculoskeletal robot development, with SpiNNaker, a neuromorphic computing platform, we present the proof-of-principle of a system that can scale to dozens of neurally-controlled, physically compliant joints. At its core, it implements a closed-loop cerebellar model which provides real-time low-level neural control at minimal power consumption and maximal extensibility: higher-order (e.g., cortical) neural networks and neuromorphic sensors like silicon-retinae or -cochleae can naturally be incorporated.