 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Cognitive Navigation: Design and Implementation of a Biologically Inspired Head Direction Cell Network
Sep 22, 2021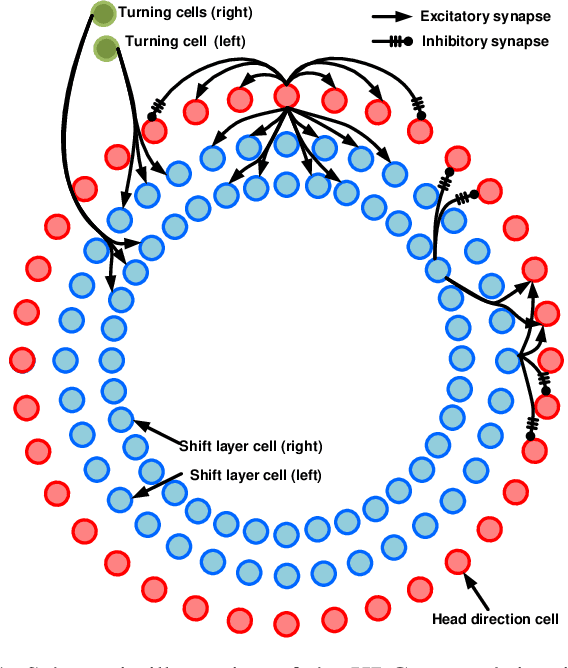
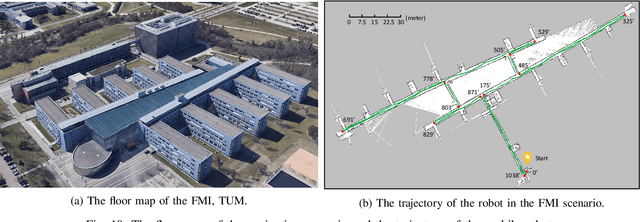
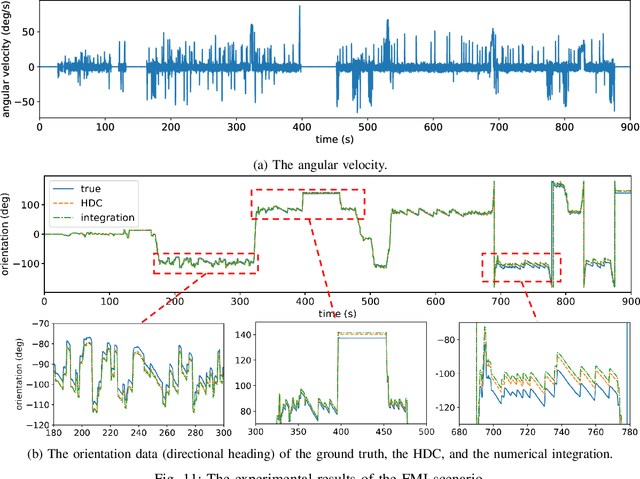
As a vital cognitive function of animals, the navigation skill is first built on the accurate perception of the directional heading in the environment. Head direction cells (HDCs), found in the limbic system of animals, are proven to play an important role in identifying the directional heading allocentrically in the horizontal plane, independent of the animal's location and the ambient conditions of the environment. However, practical HDC models that can be implemented in robotic applications are rarely investigated, especially those that are biologically plausible and yet applicable to the real world. In this paper, we propose a computational HDC network which is consistent with several neurophysiological findings concerning biological HDCs, and then implement it in robotic navigation tasks. The HDC network keeps a representation of the directional heading only relying on the angular velocity as an input. We examine the proposed HDC model in extensive simulations and real-world experiments and demonstrate its excellent performance in terms of accuracy and real-time capability.
Complex Robotic Manipulation via Graph-Based Hindsight Goal Generation
Jul 27, 2020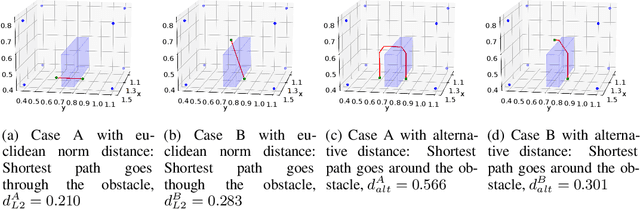
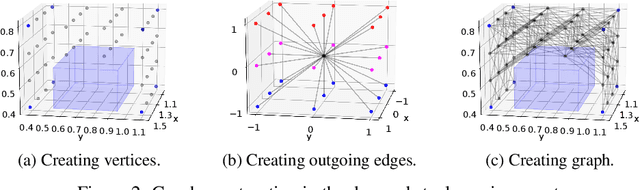
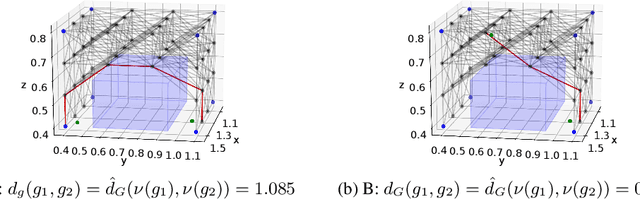
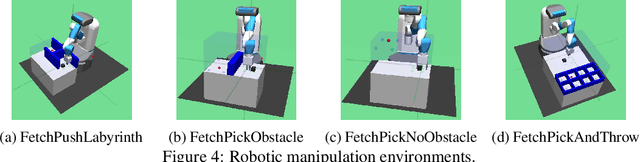
Reinforcement learning algorithms such as hindsight experience replay (HER) and hindsight goal generation (HGG) have been able to solve challenging robotic manipulation tasks in multi-goal settings with sparse rewards. HER achieves its training success through hindsight replays of past experience with heuristic goals, but under-performs in challenging tasks in which goals are difficult to explore. HGG enhances HER by selecting intermediate goals that are easy to achieve in the short term and promising to lead to target goals in the long term. This guided exploration makes HGG applicable to tasks in which target goals are far away from the object's initial position. However, HGG is not applicable to manipulation tasks with obstacles because the euclidean metric used for HGG is not an accurate distance metric in such environments. In this paper, we propose graph-based hindsight goal generation (G-HGG), an extension of HGG selecting hindsight goals based on shortest distances in an obstacle-avoiding graph, which is a discrete representation of the environment. We evaluated G-HGG on four challenging manipulation tasks with obstacles, where significant enhancements in both sample efficiency and overall success rate are shown over HGG and HER. Videos can be viewed at https://sites.google.com/view/demos-g-hgg/.