 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal and Global Information in Obstacle Detection on Railway Tracks
Jul 28, 2023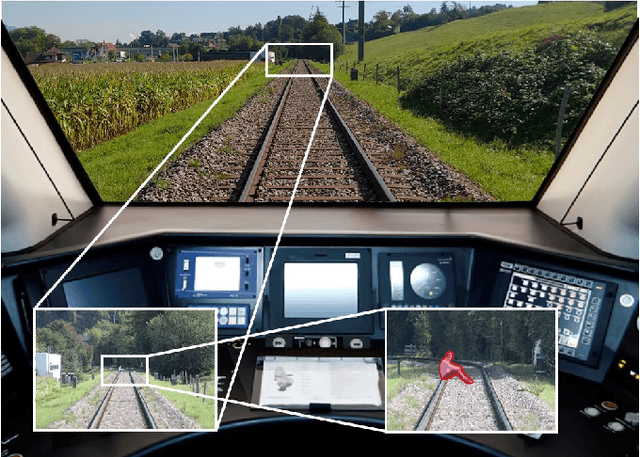
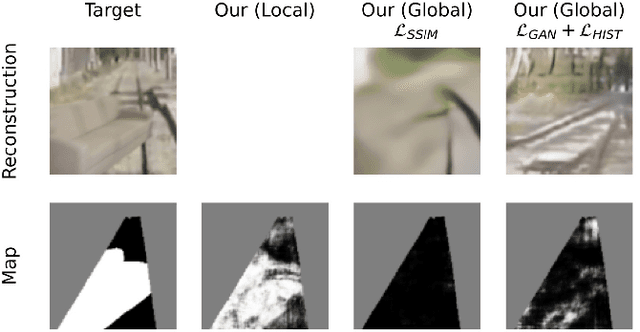
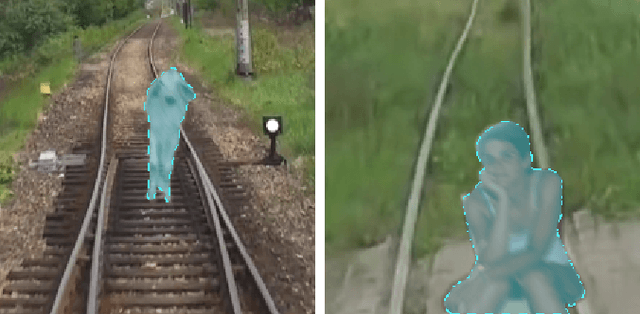
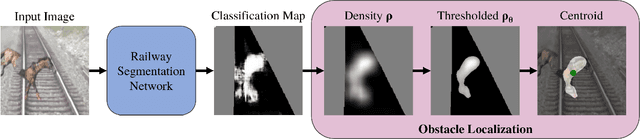
Reliable obstacle detection on railways could help prevent collisions that result in injuries and potentially damage or derail the train. Unfortunately, generic object detectors do not have enough classes to account for all possible scenarios, and datasets featuring objects on railways are challenging to obtain. We propose utilizing a shallow network to learn railway segmentation from normal railway images. The limited receptive field of the network prevents overconfident predictions and allows the network to focus on the locally very distinct and repetitive patterns of the railway environment. Additionally, we explore the controlled inclusion of global information by learning to hallucinate obstacle-free images. We evaluate our method on a custom dataset featuring railway images with artificially augmented obstacles. Our proposed method outperforms other learning-based baseline methods.
Complex Robotic Manipulation via Graph-Based Hindsight Goal Generation
Jul 27, 2020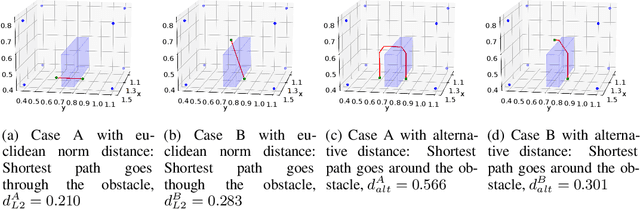
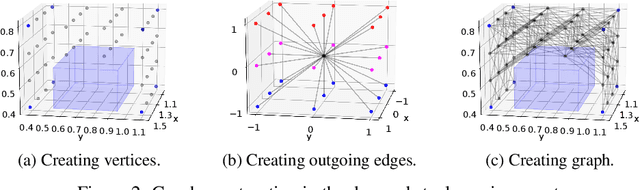
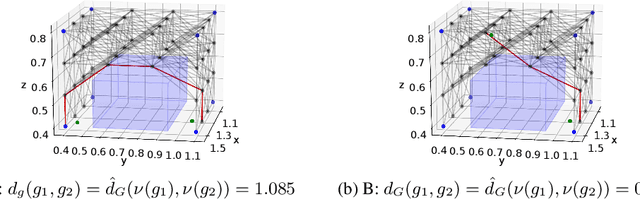
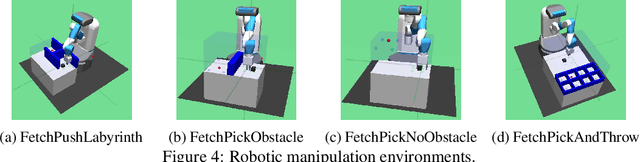
Reinforcement learning algorithms such as hindsight experience replay (HER) and hindsight goal generation (HGG) have been able to solve challenging robotic manipulation tasks in multi-goal settings with sparse rewards. HER achieves its training success through hindsight replays of past experience with heuristic goals, but under-performs in challenging tasks in which goals are difficult to explore. HGG enhances HER by selecting intermediate goals that are easy to achieve in the short term and promising to lead to target goals in the long term. This guided exploration makes HGG applicable to tasks in which target goals are far away from the object's initial position. However, HGG is not applicable to manipulation tasks with obstacles because the euclidean metric used for HGG is not an accurate distance metric in such environments. In this paper, we propose graph-based hindsight goal generation (G-HGG), an extension of HGG selecting hindsight goals based on shortest distances in an obstacle-avoiding graph, which is a discrete representation of the environment. We evaluated G-HGG on four challenging manipulation tasks with obstacles, where significant enhancements in both sample efficiency and overall success rate are shown over HGG and HER. Videos can be viewed at https://sites.google.com/view/demos-g-hgg/.