 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIRUS-NeRF -- Vision, InfraRed and UltraSonic based Neural Radiance Fields
Mar 14, 2024Autonomous mobile robots are an increasingly integral part of modern factory and warehouse operations. Obstacle detection, avoidance and path planning are critical safety-relevant tasks, which are often solved using expensive LiDAR sensors and depth cameras. We propose to use cost-effective low-resolution ranging sensors, such as ultrasonic and infrared time-of-flight sensors by developing VIRUS-NeRF - Vision, InfraRed, and UltraSonic based Neural Radiance Fields. Building upon Instant Neural Graphics Primitives with a Multiresolution Hash Encoding (Instant-NGP), VIRUS-NeRF incorporates depth measurements from ultrasonic and infrared sensors and utilizes them to update the occupancy grid used for ray marching. Experimental evaluation in 2D demonstrates that VIRUS-NeRF achieves comparable mapping performance to LiDAR point clouds regarding coverage. Notably, in small environments, its accuracy aligns with that of LiDAR measurements, while in larger ones, it is bounded by the utilized ultrasonic sensors. An in-depth ablation study reveals that adding ultrasonic and infrared sensors is highly effective when dealing with sparse data and low view variation. Further, the proposed occupancy grid of VIRUS-NeRF improves the mapping capabilities and increases the training speed by 46% compared to Instant-NGP. Overall, VIRUS-NeRF presents a promising approach for cost-effective local mapping in mobile robotics, with potential applications in safety and navigation tasks. The code can be found at https://github.com/ethz-asl/virus nerf.
Path-Constrained State Estimation for Rail Vehicles
Aug 23, 2023Globally rising demand for transportation by rail is pushing existing infrastructure to its capacity limits, necessitating the development of accurate, robust, and high-frequency positioning systems to ensure safe and efficient train operation. As individual sensor modalities cannot satisfy the strict requirements of robustness and safety, a combination thereof is required. We propose a path-constrained sensor fusion framework to integrate various modalities while leveraging the unique characteristics of the railway network. To reflect the constrained motion of rail vehicles along their tracks, the state is modeled in 1D along the track geometry. We further leverage the limited action space of a train by employing a novel multi-hypothesis tracking to account for multiple possible trajectories a vehicle can take through the railway network. We demonstrate the reliability and accuracy of our fusion framework on multiple tram datasets recorded in the city of Zurich, utilizing Visual-Inertial Odometry for local motion estimation and a standard GNSS for global localization. We evaluate our results using ground truth localizations recorded with a RTK-GNSS, and compare our method to standard baselines. A Root Mean Square Error of 4.78 m and a track selectivity score of up to 94.9 % have been achieved.
Local and Global Information in Obstacle Detection on Railway Tracks
Jul 28, 2023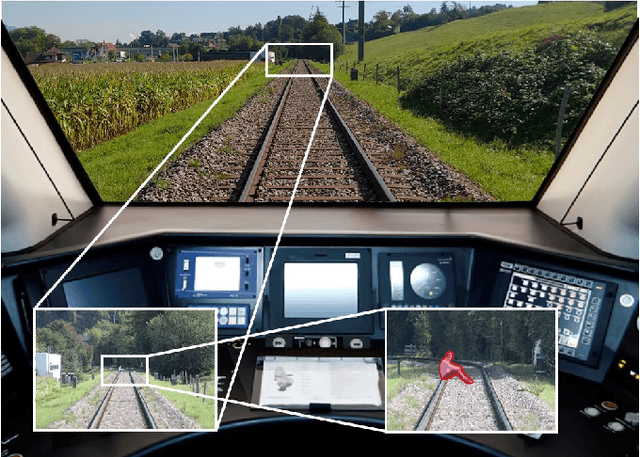
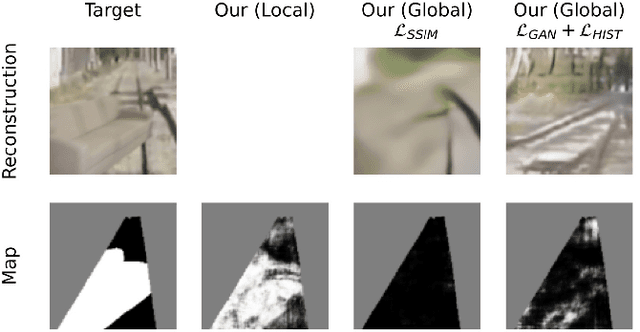
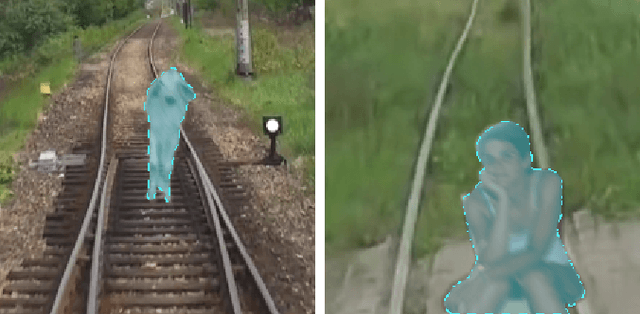
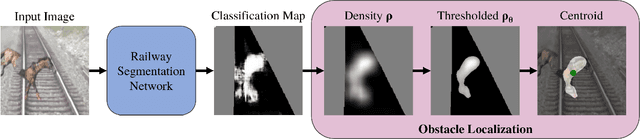
Reliable obstacle detection on railways could help prevent collisions that result in injuries and potentially damage or derail the train. Unfortunately, generic object detectors do not have enough classes to account for all possible scenarios, and datasets featuring objects on railways are challenging to obtain. We propose utilizing a shallow network to learn railway segmentation from normal railway images. The limited receptive field of the network prevents overconfident predictions and allows the network to focus on the locally very distinct and repetitive patterns of the railway environment. Additionally, we explore the controlled inclusion of global information by learning to hallucinate obstacle-free images. We evaluate our method on a custom dataset featuring railway images with artificially augmented obstacles. Our proposed method outperforms other learning-based baseline methods.
Hough2Map -- Iterative Event-based Hough Transform for High-Speed Railway Mapping
Feb 18, 2021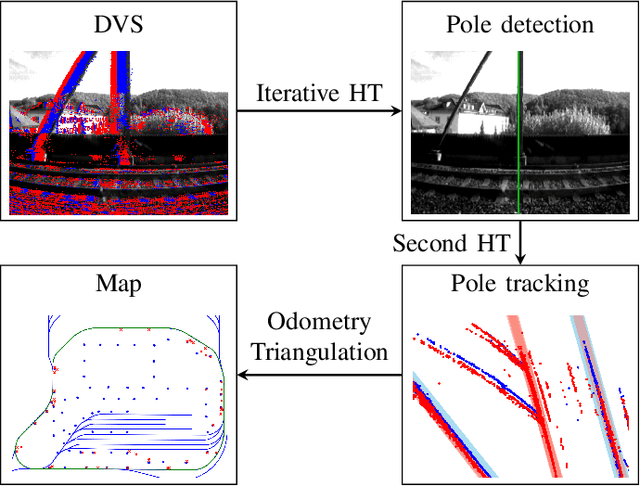
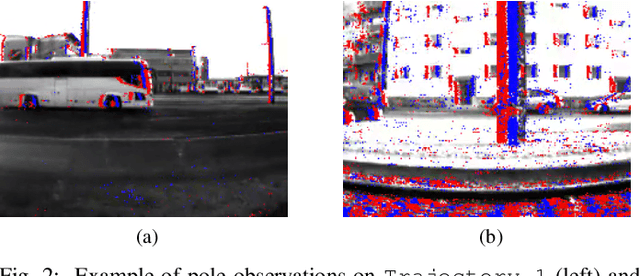
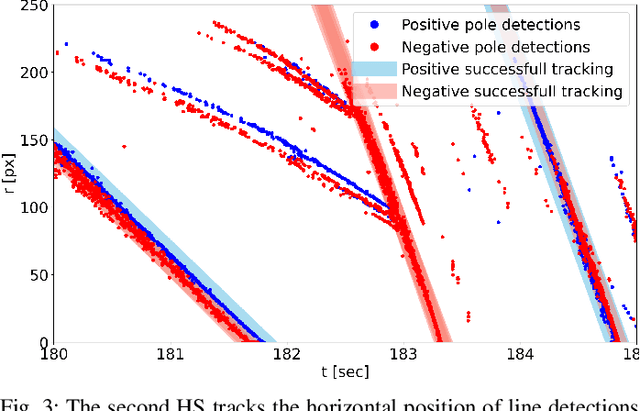

To cope with the growing demand for transportation on the railway system, accurate, robust, and high-frequency positioning is required to enable a safe and efficient utilization of the existing railway infrastructure. As a basis for a localization system we propose a complete on-board mapping pipeline able to map robust meaningful landmarks, such as poles from power lines, in the vicinity of the vehicle. Such poles are good candidates for reliable and long term landmarks even through difficult weather conditions or seasonal changes. To address the challenges of motion blur and illumination changes in railway scenarios we employ a Dynamic Vision Sensor, a novel event-based camera. Using a sideways oriented on-board camera, poles appear as vertical lines. To map such lines in a real-time event stream, we introduce Hough2Map, a novel consecutive iterative event-based Hough transform framework capable of detecting, tracking, and triangulating close-by structures. We demonstrate the mapping reliability and accuracy of Hough2Map on real-world data in typical usage scenarios and evaluate using surveyed infrastructure ground truth maps. Hough2Map achieves a detection reliability of up to 92% and a mapping root mean square error accuracy of 1.1518m.