 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal and Global Information in Obstacle Detection on Railway Tracks
Paper and Code
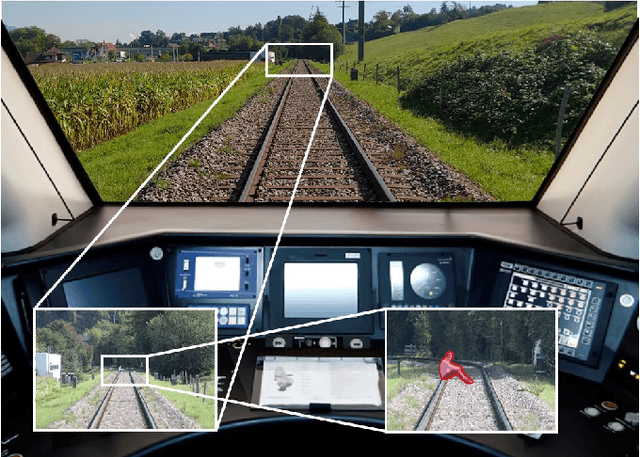
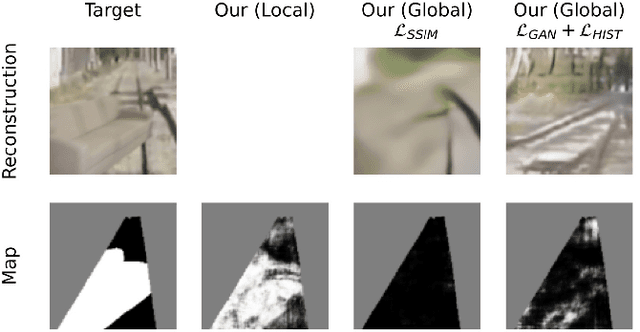
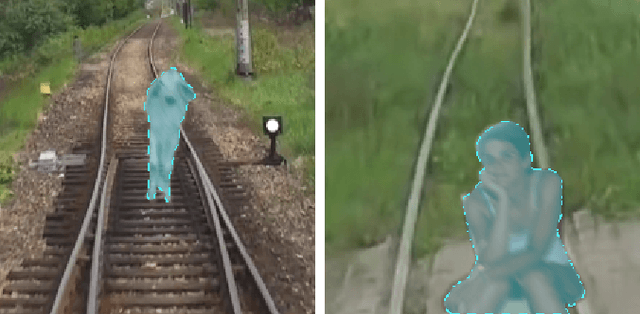
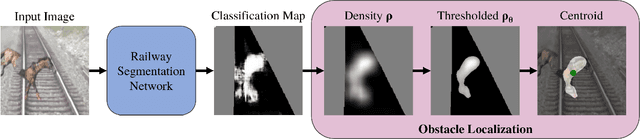
Reliable obstacle detection on railways could help prevent collisions that result in injuries and potentially damage or derail the train. Unfortunately, generic object detectors do not have enough classes to account for all possible scenarios, and datasets featuring objects on railways are challenging to obtain. We propose utilizing a shallow network to learn railway segmentation from normal railway images. The limited receptive field of the network prevents overconfident predictions and allows the network to focus on the locally very distinct and repetitive patterns of the railway environment. Additionally, we explore the controlled inclusion of global information by learning to hallucinate obstacle-free images. We evaluate our method on a custom dataset featuring railway images with artificially augmented obstacles. Our proposed method outperforms other learning-based baseline methods.