 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperion -- A fast, versatile symbolic Gaussian Belief Propagation framework for Continuous-Time SLAM
Jul 09, 2024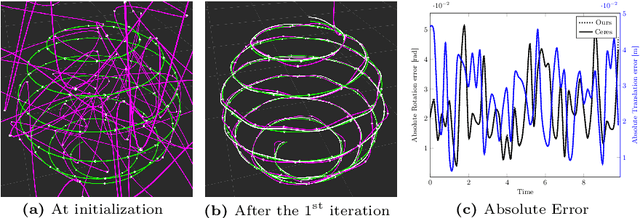
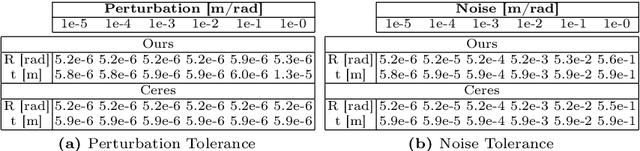
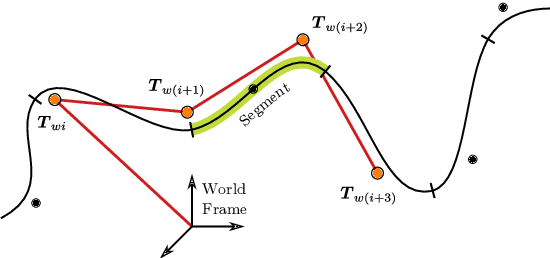
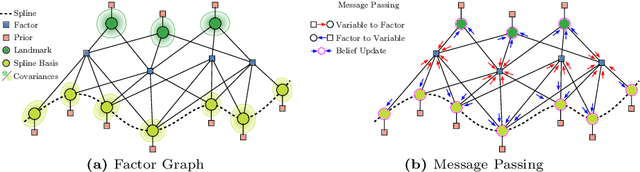
Continuous-Time Simultaneous Localization And Mapping (CTSLAM) has become a promising approach for fusing asynchronous and multi-modal sensor suites. Unlike discrete-time SLAM, which estimates poses discretely, CTSLAM uses continuous-time motion parametrizations, facilitating the integration of a variety of sensors such as rolling-shutter cameras, event cameras and Inertial Measurement Units (IMUs). However, CTSLAM approaches remain computationally demanding and are conventionally posed as centralized Non-Linear Least Squares (NLLS) optimizations. Targeting these limitations, we not only present the fastest SymForce-based [Martiros et al., RSS 2022] B- and Z-Spline implementations achieving speedups between 2.43x and 110.31x over Sommer et al. [CVPR 2020] but also implement a novel continuous-time Gaussian Belief Propagation (GBP) framework, coined Hyperion, which targets decentralized probabilistic inference across agents. We demonstrate the efficacy of our method in motion tracking and localization settings, complemented by empirical ablation studies.
Hough2Map -- Iterative Event-based Hough Transform for High-Speed Railway Mapping
Feb 18, 2021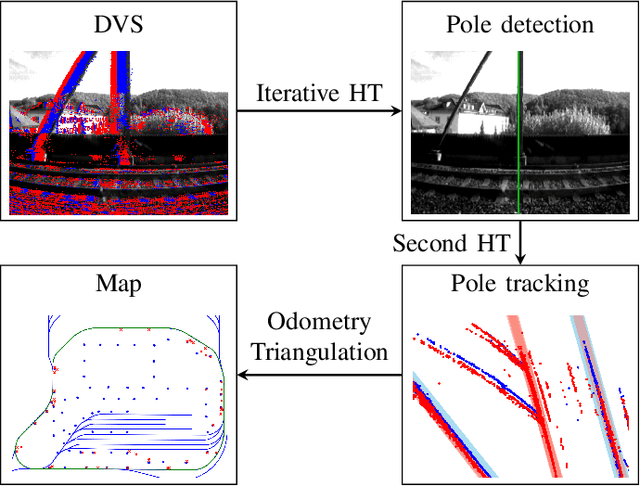
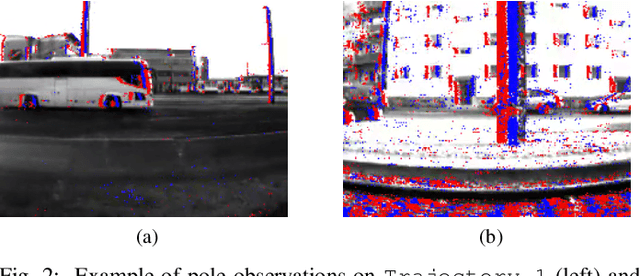
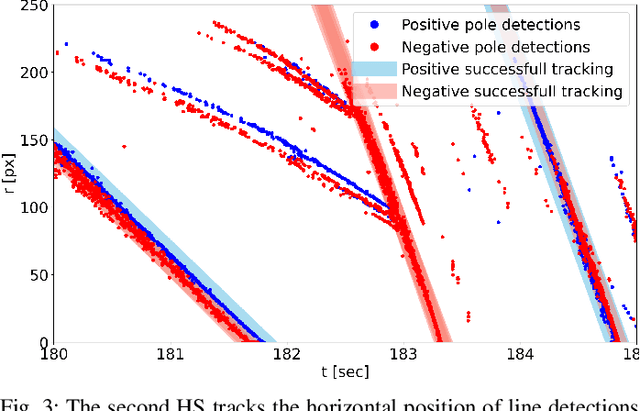

To cope with the growing demand for transportation on the railway system, accurate, robust, and high-frequency positioning is required to enable a safe and efficient utilization of the existing railway infrastructure. As a basis for a localization system we propose a complete on-board mapping pipeline able to map robust meaningful landmarks, such as poles from power lines, in the vicinity of the vehicle. Such poles are good candidates for reliable and long term landmarks even through difficult weather conditions or seasonal changes. To address the challenges of motion blur and illumination changes in railway scenarios we employ a Dynamic Vision Sensor, a novel event-based camera. Using a sideways oriented on-board camera, poles appear as vertical lines. To map such lines in a real-time event stream, we introduce Hough2Map, a novel consecutive iterative event-based Hough transform framework capable of detecting, tracking, and triangulating close-by structures. We demonstrate the mapping reliability and accuracy of Hough2Map on real-world data in typical usage scenarios and evaluate using surveyed infrastructure ground truth maps. Hough2Map achieves a detection reliability of up to 92% and a mapping root mean square error accuracy of 1.1518m.