 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving on Registers
Jan 08, 2026We present DrivoR, a simple and efficient transformer-based architecture for end-to-end autonomous driving. Our approach builds on pretrained Vision Transformers (ViTs) and introduces camera-aware register tokens that compress multi-camera features into a compact scene representation, significantly reducing downstream computation without sacrificing accuracy. These tokens drive two lightweight transformer decoders that generate and then score candidate trajectories. The scoring decoder learns to mimic an oracle and predicts interpretable sub-scores representing aspects such as safety, comfort, and efficiency, enabling behavior-conditioned driving at inference. Despite its minimal design, DrivoR outperforms or matches strong contemporary baselines across NAVSIM-v1, NAVSIM-v2, and the photorealistic closed-loop HUGSIM benchmark. Our results show that a pure-transformer architecture, combined with targeted token compression, is sufficient for accurate, efficient, and adaptive end-to-end driving. Code and checkpoints will be made available via the project page.
VaViM and VaVAM: Autonomous Driving through Video Generative Modeling
Feb 21, 2025We explore the potential of large-scale generative video models for autonomous driving, introducing an open-source auto-regressive video model (VaViM) and its companion video-action model (VaVAM) to investigate how video pre-training transfers to real-world driving. VaViM is a simple auto-regressive video model that predicts frames using spatio-temporal token sequences. We show that it captures the semantics and dynamics of driving scenes. VaVAM, the video-action model, leverages the learned representations of VaViM to generate driving trajectories through imitation learning. Together, the models form a complete perception-to-action pipeline. We evaluate our models in open- and closed-loop driving scenarios, revealing that video-based pre-training holds promise for autonomous driving. Key insights include the semantic richness of the learned representations, the benefits of scaling for video synthesis, and the complex relationship between model size, data, and safety metrics in closed-loop evaluations. We release code and model weights at https://github.com/valeoai/VideoActionModel
Valeo4Cast: A Modular Approach to End-to-End Forecasting
Jun 12, 2024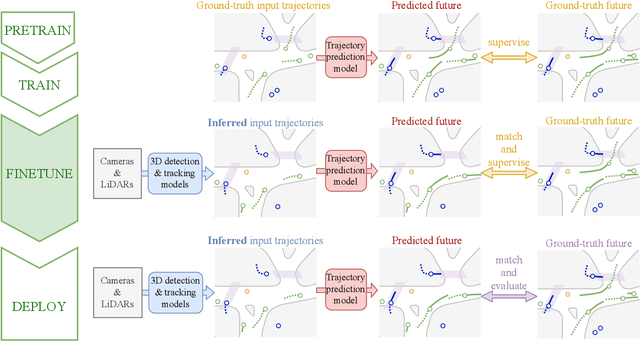
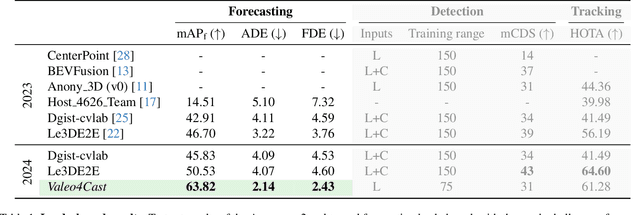
Motion forecasting is crucial in autonomous driving systems to anticipate the future trajectories of surrounding agents such as pedestrians, vehicles, and traffic signals. In end-to-end forecasting, the model must jointly detect from sensor data (cameras or LiDARs) the position and past trajectories of the different elements of the scene and predict their future location. We depart from the current trend of tackling this task via end-to-end training from perception to forecasting and we use a modular approach instead. Following a recent study, we individually build and train detection, tracking, and forecasting modules. We then only use consecutive finetuning steps to integrate the modules better and alleviate compounding errors. Our study reveals that this simple yet effective approach significantly improves performance on the end-to-end forecasting benchmark. Consequently, our solution ranks first in the Argoverse 2 end-to-end Forecasting Challenge held at CVPR 2024 Workshop on Autonomous Driving (WAD), with 63.82 mAPf. We surpass forecasting results by +17.1 points over last year's winner and by +13.3 points over this year's runner-up. This remarkable performance in forecasting can be explained by our modular paradigm, which integrates finetuning strategies and significantly outperforms the end-to-end-trained counterparts.
PointBeV: A Sparse Approach to BeV Predictions
Dec 01, 2023



Bird's-eye View (BeV) representations have emerged as the de-facto shared space in driving applications, offering a unified space for sensor data fusion and supporting various downstream tasks. However, conventional models use grids with fixed resolution and range and face computational inefficiencies due to the uniform allocation of resources across all cells. To address this, we propose PointBeV, a novel sparse BeV segmentation model operating on sparse BeV cells instead of dense grids. This approach offers precise control over memory usage, enabling the use of long temporal contexts and accommodating memory-constrained platforms. PointBeV employs an efficient two-pass strategy for training, enabling focused computation on regions of interest. At inference time, it can be used with various memory/performance trade-offs and flexibly adjusts to new specific use cases. PointBeV achieves state-of-the-art results on the nuScenes dataset for vehicle, pedestrian, and lane segmentation, showcasing superior performance in static and temporal settings despite being trained solely with sparse signals. We will release our code along with two new efficient modules used in the architecture: Sparse Feature Pulling, designed for the effective extraction of features from images to BeV, and Submanifold Attention, which enables efficient temporal modeling. Our code is available at https://github.com/valeoai/PointBeV.
LaRa: Latents and Rays for Multi-Camera Bird's-Eye-View Semantic Segmentation
Jun 27, 2022

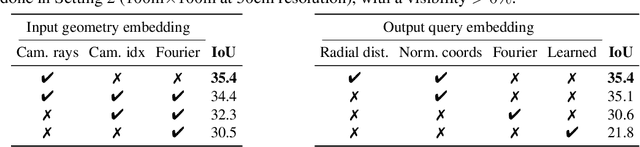

Recent works in autonomous driving have widely adopted the bird's-eye-view (BEV) semantic map as an intermediate representation of the world. Online prediction of these BEV maps involves non-trivial operations such as multi-camera data extraction as well as fusion and projection into a common top-view grid. This is usually done with error-prone geometric operations (e.g., homography or back-projection from monocular depth estimation) or expensive direct dense mapping between image pixels and pixels in BEV (e.g., with MLP or attention). In this work, we present 'LaRa', an efficient encoder-decoder, transformer-based model for vehicle semantic segmentation from multiple cameras. Our approach uses a system of cross-attention to aggregate information over multiple sensors into a compact, yet rich, collection of latent representations. These latent representations, after being processed by a series of self-attention blocks, are then reprojected with a second cross-attention in the BEV space. We demonstrate that our model outperforms on nuScenes the best previous works using transformers.
LiDARTouch: Monocular metric depth estimation with a few-beam LiDAR
Sep 08, 2021



Vision-based depth estimation is a key feature in autonomous systems, which often relies on a single camera or several independent ones. In such a monocular setup, dense depth is obtained with either additional input from one or several expensive LiDARs, e.g., with 64 beams, or camera-only methods, which suffer from scale-ambiguity and infinite-depth problems. In this paper, we propose a new alternative of densely estimating metric depth by combining a monocular camera with a light-weight LiDAR, e.g., with 4 beams, typical of today's automotive-grade mass-produced laser scanners. Inspired by recent self-supervised methods, we introduce a novel framework, called LiDARTouch, to estimate dense depth maps from monocular images with the help of ``touches'' of LiDAR, i.e., without the need for dense ground-truth depth. In our setup, the minimal LiDAR input contributes on three different levels: as an additional model's input, in a self-supervised LiDAR reconstruction objective function, and to estimate changes of pose (a key component of self-supervised depth estimation architectures). Our LiDARTouch framework achieves new state of the art in self-supervised depth estimation on the KITTI dataset, thus supporting our choices of integrating the very sparse LiDAR signal with other visual features. Moreover, we show that the use of a few-beam LiDAR alleviates scale ambiguity and infinite-depth issues that camera-only methods suffer from. We also demonstrate that methods from the fully-supervised depth-completion literature can be adapted to a self-supervised regime with a minimal LiDAR signal.