 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstration-Guided Continual Reinforcement Learning in Dynamic Environments
Dec 21, 2025Reinforcement learning (RL) excels in various applications but struggles in dynamic environments where the underlying Markov decision process evolves. Continual reinforcement learning (CRL) enables RL agents to continually learn and adapt to new tasks, but balancing stability (preserving prior knowledge) and plasticity (acquiring new knowledge) remains challenging. Existing methods primarily address the stability-plasticity dilemma through mechanisms where past knowledge influences optimization but rarely affects the agent's behavior directly, which may hinder effective knowledge reuse and efficient learning. In contrast, we propose demonstration-guided continual reinforcement learning (DGCRL), which stores prior knowledge in an external, self-evolving demonstration repository that directly guides RL exploration and adaptation. For each task, the agent dynamically selects the most relevant demonstration and follows a curriculum-based strategy to accelerate learning, gradually shifting from demonstration-guided exploration to fully self-exploration. Extensive experiments on 2D navigation and MuJoCo locomotion tasks demonstrate its superior average performance, enhanced knowledge transfer, mitigation of forgetting, and training efficiency. The additional sensitivity analysis and ablation study further validate its effectiveness.
Utility-Based Reinforcement Learning: Unifying Single-objective and Multi-objective Reinforcement Learning
Feb 05, 2024Research in multi-objective reinforcement learning (MORL) has introduced the utility-based paradigm, which makes use of both environmental rewards and a function that defines the utility derived by the user from those rewards. In this paper we extend this paradigm to the context of single-objective reinforcement learning (RL), and outline multiple potential benefits including the ability to perform multi-policy learning across tasks relating to uncertain objectives, risk-aware RL, discounting, and safe RL. We also examine the algorithmic implications of adopting a utility-based approach.
ADT: Agent-based Dynamic Thresholding for Anomaly Detection
Dec 03, 2023The complexity and scale of IT systems are increasing dramatically, posing many challenges to real-world anomaly detection. Deep learning anomaly detection has emerged, aiming at feature learning and anomaly scoring, which has gained tremendous success. However, little work has been done on the thresholding problem despite it being a critical factor for the effectiveness of anomaly detection. In this paper, we model thresholding in anomaly detection as a Markov Decision Process and propose an agent-based dynamic thresholding (ADT) framework based on a deep Q-network. The proposed method can be integrated into many systems that require dynamic thresholding. An auto-encoder is utilized in this study to obtain feature representations and produce anomaly scores for complex input data. ADT can adjust thresholds adaptively by utilizing the anomaly scores from the auto-encoder and significantly improve anomaly detection performance. The properties of ADT are studied through experiments on three real-world datasets and compared with benchmarks, hence demonstrating its thresholding capability, data-efficient learning, stability, and robustness. Our study validates the effectiveness of reinforcement learning in optimal thresholding control in anomaly detection.
Distributional Multi-Objective Decision Making
May 19, 2023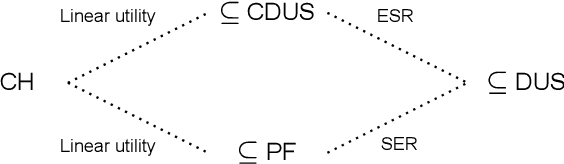
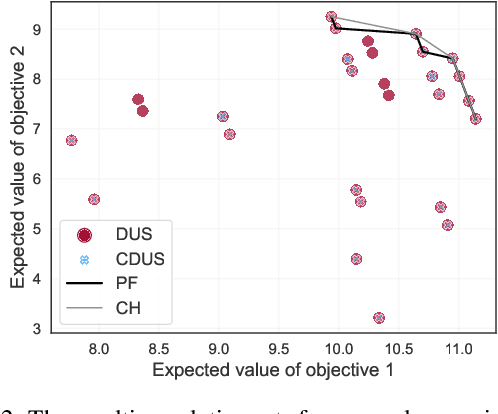
For effective decision support in scenarios with conflicting objectives, sets of potentially optimal solutions can be presented to the decision maker. We explore both what policies these sets should contain and how such sets can be computed efficiently. With this in mind, we take a distributional approach and introduce a novel dominance criterion relating return distributions of policies directly. Based on this criterion, we present the distributional undominated set and show that it contains optimal policies otherwise ignored by the Pareto front. In addition, we propose the convex distributional undominated set and prove that it comprises all policies that maximise expected utility for multivariate risk-averse decision makers. We propose a novel algorithm to learn the distributional undominated set and further contribute pruning operators to reduce the set to the convex distributional undominated set. Through experiments, we demonstrate the feasibility and effectiveness of these methods, making this a valuable new approach for decision support in real-world problems.
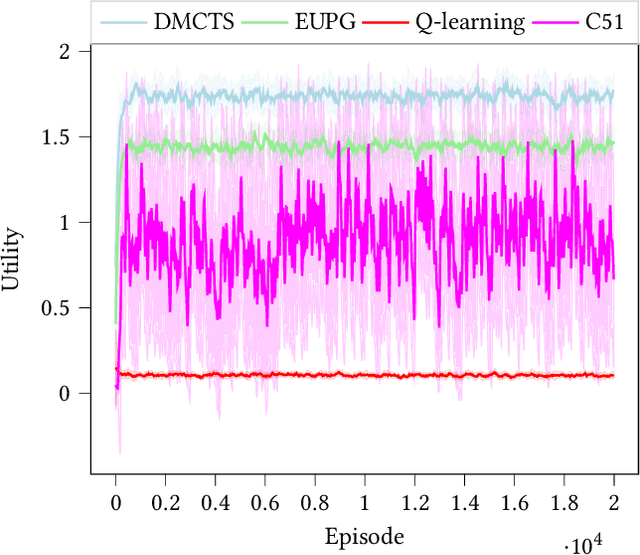
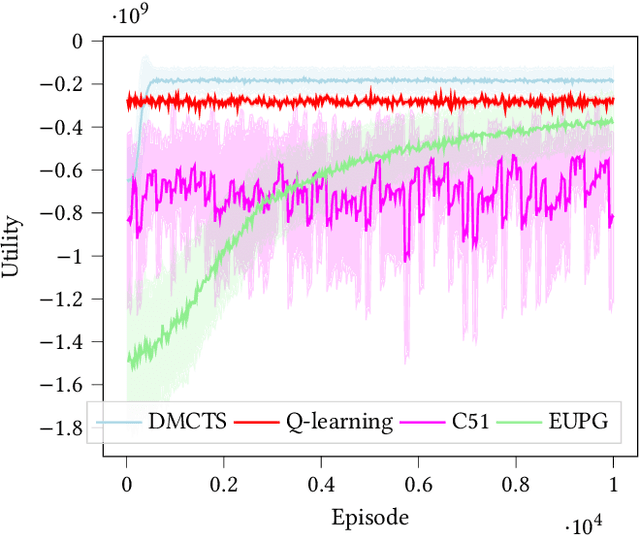
Monte Carlo Tree Search Algorithms for Risk-Aware and Multi-Objective Reinforcement Learning
Dec 06, 2022In many risk-aware and multi-objective reinforcement learning settings, the utility of the user is derived from a single execution of a policy. In these settings, making decisions based on the average future returns is not suitable. For example, in a medical setting a patient may only have one opportunity to treat their illness. Making decisions using just the expected future returns -- known in reinforcement learning as the value -- cannot account for the potential range of adverse or positive outcomes a decision may have. Therefore, we should use the distribution over expected future returns differently to represent the critical information that the agent requires at decision time by taking both the future and accrued returns into consideration. In this paper, we propose two novel Monte Carlo tree search algorithms. Firstly, we present a Monte Carlo tree search algorithm that can compute policies for nonlinear utility functions (NLU-MCTS) by optimising the utility of the different possible returns attainable from individual policy executions, resulting in good policies for both risk-aware and multi-objective settings. Secondly, we propose a distributional Monte Carlo tree search algorithm (DMCTS) which extends NLU-MCTS. DMCTS computes an approximate posterior distribution over the utility of the returns, and utilises Thompson sampling during planning to compute policies in risk-aware and multi-objective settings. Both algorithms outperform the state-of-the-art in multi-objective reinforcement learning for the expected utility of the returns.
Multi-Objective Coordination Graphs for the Expected Scalarised Returns with Generative Flow Models
Jul 01, 2022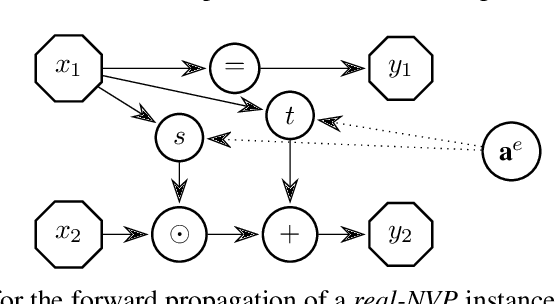
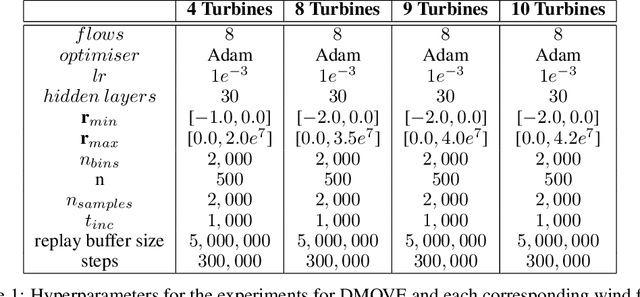
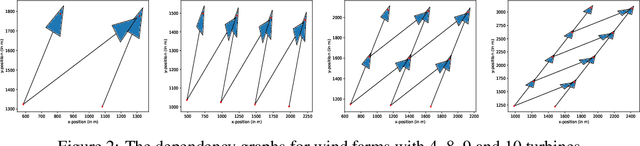

Many real-world problems contain multiple objectives and agents, where a trade-off exists between objectives. Key to solving such problems is to exploit sparse dependency structures that exist between agents. For example, in wind farm control a trade-off exists between maximising power and minimising stress on the systems components. Dependencies between turbines arise due to the wake effect. We model such sparse dependencies between agents as a multi-objective coordination graph (MO-CoG). In multi-objective reinforcement learning a utility function is typically used to model a users preferences over objectives, which may be unknown a priori. In such settings a set of optimal policies must be computed. Which policies are optimal depends on which optimality criterion applies. If the utility function of a user is derived from multiple executions of a policy, the scalarised expected returns (SER) must be optimised. If the utility of a user is derived from a single execution of a policy, the expected scalarised returns (ESR) criterion must be optimised. For example, wind farms are subjected to constraints and regulations that must be adhered to at all times, therefore the ESR criterion must be optimised. For MO-CoGs, the state-of-the-art algorithms can only compute a set of optimal policies for the SER criterion, leaving the ESR criterion understudied. To compute a set of optimal polices under the ESR criterion, also known as the ESR set, distributions over the returns must be maintained. Therefore, to compute a set of optimal policies under the ESR criterion for MO-CoGs, we present a novel distributional multi-objective variable elimination (DMOVE) algorithm. We evaluate DMOVE in realistic wind farm simulations. Given the returns in real-world wind farm settings are continuous, we utilise a model known as real-NVP to learn the continuous return distributions to calculate the ESR set.
Exploring the Pareto front of multi-objective COVID-19 mitigation policies using reinforcement learning
Apr 11, 2022
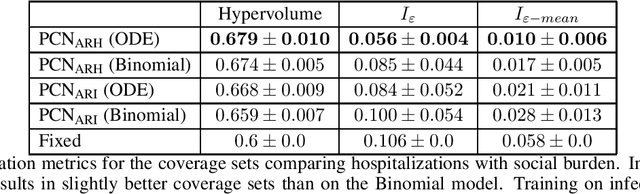
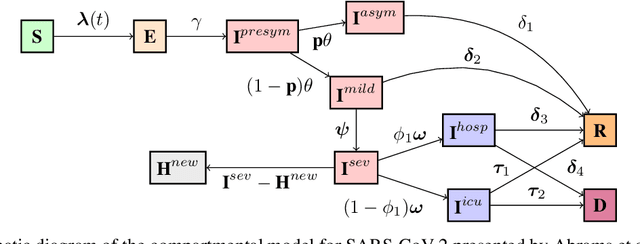
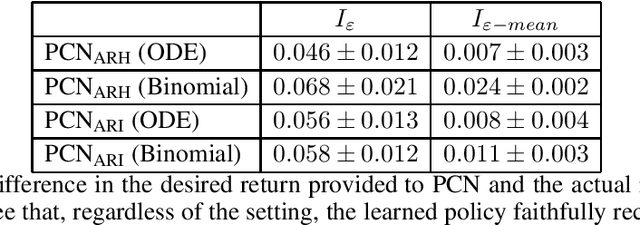
Infectious disease outbreaks can have a disruptive impact on public health and societal processes. As decision making in the context of epidemic mitigation is hard, reinforcement learning provides a methodology to automatically learn prevention strategies in combination with complex epidemic models. Current research focuses on optimizing policies w.r.t. a single objective, such as the pathogen's attack rate. However, as the mitigation of epidemics involves distinct, and possibly conflicting criteria (i.a., prevalence, mortality, morbidity, cost), a multi-objective approach is warranted to learn balanced policies. To lift this decision-making process to real-world epidemic models, we apply deep multi-objective reinforcement learning and build upon a state-of-the-art algorithm, Pareto Conditioned Networks (PCN), to learn a set of solutions that approximates the Pareto front of the decision problem. We consider the first wave of the Belgian COVID-19 epidemic, which was mitigated by a lockdown, and study different deconfinement strategies, aiming to minimize both COVID-19 cases (i.e., infections and hospitalizations) and the societal burden that is induced by the applied mitigation measures. We contribute a multi-objective Markov decision process that encapsulates the stochastic compartment model that was used to inform policy makers during the COVID-19 epidemic. As these social mitigation measures are implemented in a continuous action space that modulates the contact matrix of the age-structured epidemic model, we extend PCN to this setting. We evaluate the solution returned by PCN, and observe that it correctly learns to reduce the social burden whenever the hospitalization rates are sufficiently low. In this work, we thus show that multi-objective reinforcement learning is attainable in complex epidemiological models and provides essential insights to balance complex mitigation policies.
Expected Scalarised Returns Dominance: A New Solution Concept for Multi-Objective Decision Making
Jun 02, 2021
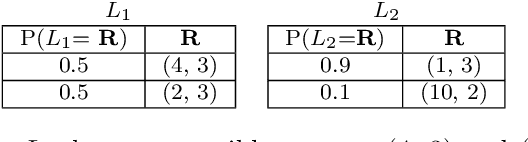
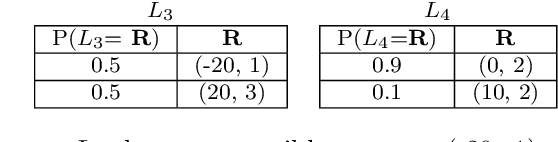
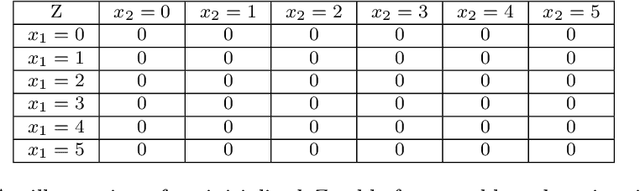
In many real-world scenarios, the utility of a user is derived from the single execution of a policy. In this case, to apply multi-objective reinforcement learning, the expected utility of the returns must be optimised. Various scenarios exist where a user's preferences over objectives (also known as the utility function) are unknown or difficult to specify. In such scenarios, a set of optimal policies must be learned. However, settings where the expected utility must be maximised have been largely overlooked by the multi-objective reinforcement learning community and, as a consequence, a set of optimal solutions has yet to be defined. In this paper we address this challenge by proposing first-order stochastic dominance as a criterion to build solution sets to maximise expected utility. We also propose a new dominance criterion, known as expected scalarised returns (ESR) dominance, that extends first-order stochastic dominance to allow a set of optimal policies to be learned in practice. We then define a new solution concept called the ESR set, which is a set of policies that are ESR dominant. Finally, we define a new multi-objective distributional tabular reinforcement learning (MOT-DRL) algorithm to learn the ESR set in a multi-objective multi-armed bandit setting.
A Practical Guide to Multi-Objective Reinforcement Learning and Planning
Mar 17, 2021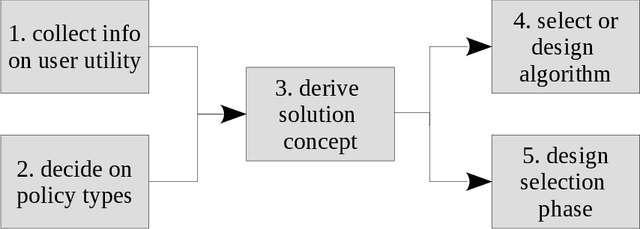
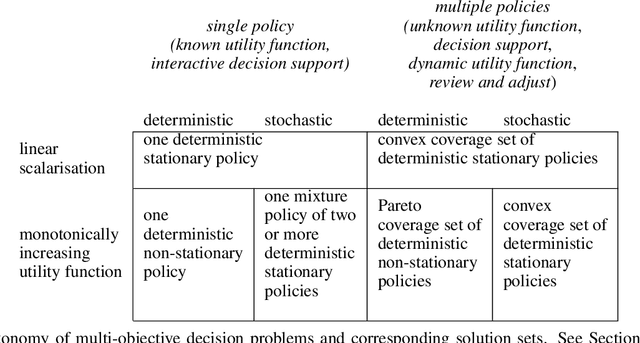
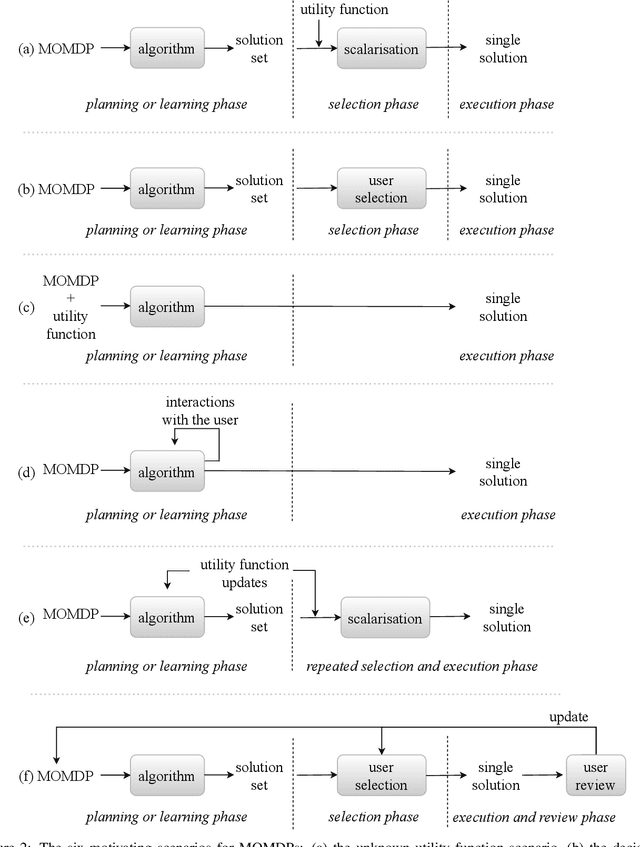
Real-world decision-making tasks are generally complex, requiring trade-offs between multiple, often conflicting, objectives. Despite this, the majority of research in reinforcement learning and decision-theoretic planning either assumes only a single objective, or that multiple objectives can be adequately handled via a simple linear combination. Such approaches may oversimplify the underlying problem and hence produce suboptimal results. This paper serves as a guide to the application of multi-objective methods to difficult problems, and is aimed at researchers who are already familiar with single-objective reinforcement learning and planning methods who wish to adopt a multi-objective perspective on their research, as well as practitioners who encounter multi-objective decision problems in practice. It identifies the factors that may influence the nature of the desired solution, and illustrates by example how these influence the design of multi-objective decision-making systems for complex problems.
Risk Aware and Multi-Objective Decision Making with Distributional Monte Carlo Tree Search
Feb 02, 2021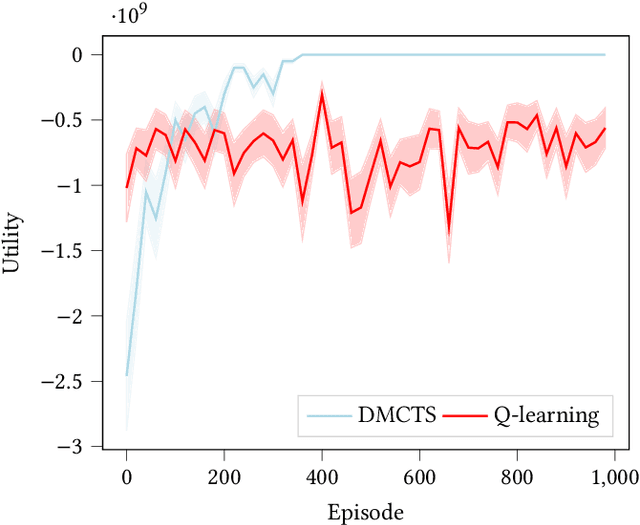
In many risk-aware and multi-objective reinforcement learning settings, the utility of the user is derived from the single execution of a policy. In these settings, making decisions based on the average future returns is not suitable. For example, in a medical setting a patient may only have one opportunity to treat their illness. When making a decision, just the expected return -- known in reinforcement learning as the value -- cannot account for the potential range of adverse or positive outcomes a decision may have. Our key insight is that we should use the distribution over expected future returns differently to represent the critical information that the agent requires at decision time. In this paper, we propose Distributional Monte Carlo Tree Search, an algorithm that learns a posterior distribution over the utility of the different possible returns attainable from individual policy executions, resulting in good policies for both risk-aware and multi-objective settings. Moreover, our algorithm outperforms the state-of-the-art in multi-objective reinforcement learning for the expected utility of the returns.