 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhAME: Phenotype-Aware Molecular Editing via Latent Diffusion
May 27, 2026Small-molecule drug discovery requires simultaneous optimization of numerous properties of candidate molecules. These properties can be investigated through the analysis of high-dimensional biological signatures, such as cell morphology and transcriptomic perturbations, which provide a rich perspective on the underlying biological mechanisms. However, existing generative methods, which use those signatures for optimization, fail to meet two key requirements: providing precise guidance toward desired phenotypic signatures while maintaining structural proximity to a known hit. We introduce PhAME (Phenotype-Aware Molecular Editing), a latent diffusion framework that overcomes this challenge by recasting molecular optimization as editing in the latent space of a pretrained graph-based VAE. Our central contribution is a compositional classifier-free guidance scheme with two independent scales, one for the phenotype-conditioning and one for similarity to the seed structure, allowing practitioners to control the tradeoff between these two objectives. Empirical evaluations across diverse benchmarks, including docking score optimization and multimodal phenotypic generation, demonstrate that PhAME achieves state-of-the-art results while maintaining high chemical validity and novelty.
DAVE: Distribution-aware Attribution via ViT Gradient Decomposition
Feb 06, 2026Vision Transformers (ViTs) have become a dominant architecture in computer vision, yet producing stable and high-resolution attribution maps for these models remains challenging. Architectural components such as patch embeddings and attention routing often introduce structured artifacts in pixel-level explanations, causing many existing methods to rely on coarse patch-level attributions. We introduce DAVE \textit{(\underline{D}istribution-aware \underline{A}ttribution via \underline{V}iT Gradient D\underline{E}composition)}, a mathematically grounded attribution method for ViTs based on a structured decomposition of the input gradient. By exploiting architectural properties of ViTs, DAVE isolates locally equivariant and stable components of the effective input--output mapping. It separates these from architecture-induced artifacts and other sources of instability.
ProtoQuant: Quantization of Prototypical Parts For General and Fine-Grained Image Classification
Feb 06, 2026Prototypical parts-based models offer a "this looks like that" paradigm for intrinsic interpretability, yet they typically struggle with ImageNet-scale generalization and often require computationally expensive backbone finetuning. Furthermore, existing methods frequently suffer from "prototype drift," where learned prototypes lack tangible grounding in the training distribution and change their activation under small perturbations. We present ProtoQuant, a novel architecture that achieves prototype stability and grounded interpretability through latent vector quantization. By constraining prototypes to a discrete learned codebook within the latent space, we ensure they remain faithful representations of the training data without the need to update the backbone. This design allows ProtoQuant to function as an efficient, interpretable head that scales to large-scale datasets. We evaluate ProtoQuant on ImageNet and several fine-grained benchmarks (CUB-200, Cars-196). Our results demonstrate that ProtoQuant achieves competitive classification accuracy while generalizing to ImageNet and comparable interpretability metrics to other prototypical-parts-based methods.
Personalized Interpretability -- Interactive Alignment of Prototypical Parts Networks
Jun 05, 2025Concept-based interpretable neural networks have gained significant attention due to their intuitive and easy-to-understand explanations based on case-based reasoning, such as "this bird looks like those sparrows". However, a major limitation is that these explanations may not always be comprehensible to users due to concept inconsistency, where multiple visual features are inappropriately mixed (e.g., a bird's head and wings treated as a single concept). This inconsistency breaks the alignment between model reasoning and human understanding. Furthermore, users have specific preferences for how concepts should look, yet current approaches provide no mechanism for incorporating their feedback. To address these issues, we introduce YoursProtoP, a novel interactive strategy that enables the personalization of prototypical parts - the visual concepts used by the model - according to user needs. By incorporating user supervision, YoursProtoP adapts and splits concepts used for both prediction and explanation to better match the user's preferences and understanding. Through experiments on both the synthetic FunnyBirds dataset and a real-world scenario using the CUB, CARS, and PETS datasets in a comprehensive user study, we demonstrate the effectiveness of YoursProtoP in achieving concept consistency without compromising the accuracy of the model.
B-XAIC Dataset: Benchmarking Explainable AI for Graph Neural Networks Using Chemical Data
May 28, 2025Understanding the reasoning behind deep learning model predictions is crucial in cheminformatics and drug discovery, where molecular design determines their properties. However, current evaluation frameworks for Explainable AI (XAI) in this domain often rely on artificial datasets or simplified tasks, employing data-derived metrics that fail to capture the complexity of real-world scenarios and lack a direct link to explanation faithfulness. To address this, we introduce B-XAIC, a novel benchmark constructed from real-world molecular data and diverse tasks with known ground-truth rationales for assigned labels. Through a comprehensive evaluation using B-XAIC, we reveal limitations of existing XAI methods for Graph Neural Networks (GNNs) in the molecular domain. This benchmark provides a valuable resource for gaining deeper insights into the faithfulness of XAI, facilitating the development of more reliable and interpretable models.
AI-Driven Rapid Identification of Bacterial and Fungal Pathogens in Blood Smears of Septic Patients
Mar 17, 2025Sepsis is a life-threatening condition which requires rapid diagnosis and treatment. Traditional microbiological methods are time-consuming and expensive. In response to these challenges, deep learning algorithms were developed to identify 14 bacteria species and 3 yeast-like fungi from microscopic images of Gram-stained smears of positive blood samples from sepsis patients. A total of 16,637 Gram-stained microscopic images were used in the study. The analysis used the Cellpose 3 model for segmentation and Attention-based Deep Multiple Instance Learning for classification. Our model achieved an accuracy of 77.15% for bacteria and 71.39% for fungi, with ROC AUC of 0.97 and 0.88, respectively. The highest values, reaching up to 96.2%, were obtained for Cutibacterium acnes, Enterococcus faecium, Stenotrophomonas maltophilia and Nakaseomyces glabratus. Classification difficulties were observed in closely related species, such as Staphylococcus hominis and Staphylococcus haemolyticus, due to morphological similarity, and within Candida albicans due to high morphotic diversity. The study confirms the potential of our model for microbial classification, but it also indicates the need for further optimisation and expansion of the training data set. In the future, this technology could support microbial diagnosis, reducing diagnostic time and improving the effectiveness of sepsis treatment due to its simplicity and accessibility. Part of the results presented in this publication was covered by a patent application at the European Patent Office EP24461637.1 "A computer implemented method for identifying a microorganism in a blood and a data processing system therefor".
SEMU: Singular Value Decomposition for Efficient Machine Unlearning
Feb 11, 2025



While the capabilities of generative foundational models have advanced rapidly in recent years, methods to prevent harmful and unsafe behaviors remain underdeveloped. Among the pressing challenges in AI safety, machine unlearning (MU) has become increasingly critical to meet upcoming safety regulations. Most existing MU approaches focus on altering the most significant parameters of the model. However, these methods often require fine-tuning substantial portions of the model, resulting in high computational costs and training instabilities, which are typically mitigated by access to the original training dataset. In this work, we address these limitations by leveraging Singular Value Decomposition (SVD) to create a compact, low-dimensional projection that enables the selective forgetting of specific data points. We propose Singular Value Decomposition for Efficient Machine Unlearning (SEMU), a novel approach designed to optimize MU in two key aspects. First, SEMU minimizes the number of model parameters that need to be modified, effectively removing unwanted knowledge while making only minimal changes to the model's weights. Second, SEMU eliminates the dependency on the original training dataset, preserving the model's previously acquired knowledge without additional data requirements. Extensive experiments demonstrate that SEMU achieves competitive performance while significantly improving efficiency in terms of both data usage and the number of modified parameters.
OMENN: One Matrix to Explain Neural Networks
Dec 03, 2024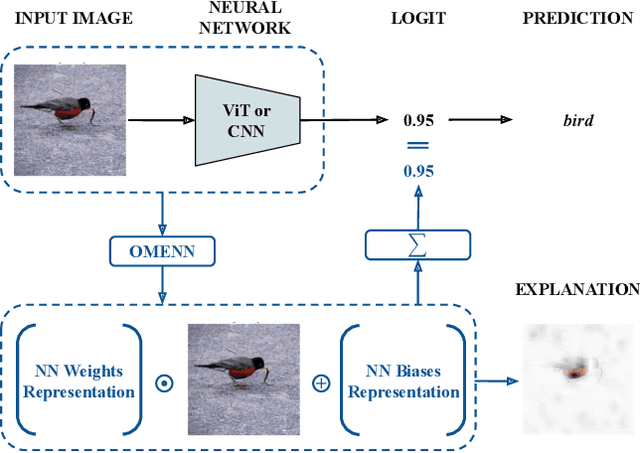
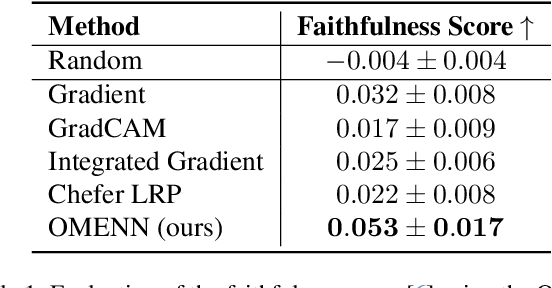
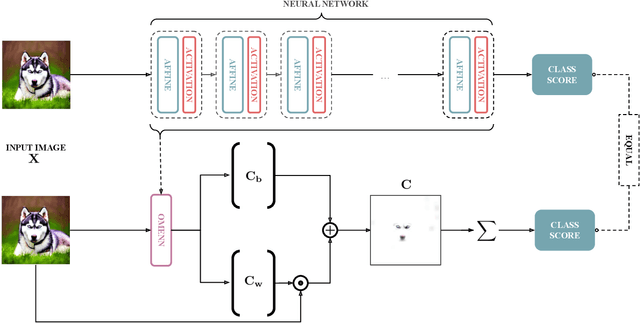
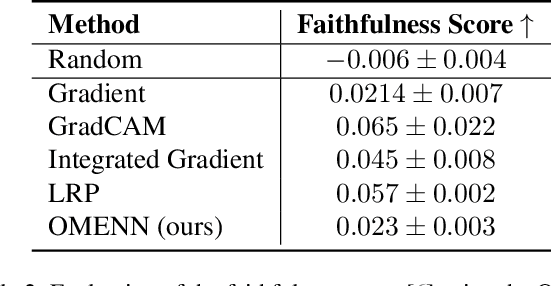
Deep Learning (DL) models are often black boxes, making their decision-making processes difficult to interpret. This lack of transparency has driven advancements in eXplainable Artificial Intelligence (XAI), a field dedicated to clarifying the reasoning behind DL model predictions. Among these, attribution-based methods such as LRP and GradCAM are widely used, though they rely on approximations that can be imprecise. To address these limitations, we introduce One Matrix to Explain Neural Networks (OMENN), a novel post-hoc method that represents a neural network as a single, interpretable matrix for each specific input. This matrix is constructed through a series of linear transformations that represent the processing of the input by each successive layer in the neural network. As a result, OMENN provides locally precise, attribution-based explanations of the input across various modern models, including ViTs and CNNs. We present a theoretical analysis of OMENN based on dynamic linearity property and validate its effectiveness with extensive tests on two XAI benchmarks, demonstrating that OMENN is competitive with state-of-the-art methods.
Revisiting FunnyBirds evaluation framework for prototypical parts networks
Aug 21, 2024Prototypical parts networks, such as ProtoPNet, became popular due to their potential to produce more genuine explanations than post-hoc methods. However, for a long time, this potential has been strictly theoretical, and no systematic studies have existed to support it. That changed recently with the introduction of the FunnyBirds benchmark, which includes metrics for evaluating different aspects of explanations. However, this benchmark employs attribution maps visualization for all explanation techniques except for the ProtoPNet, for which the bounding boxes are used. This choice significantly influences the metric scores and questions the conclusions stated in FunnyBirds publication. In this study, we comprehensively compare metric scores obtained for two types of ProtoPNet visualizations: bounding boxes and similarity maps. Our analysis indicates that employing similarity maps aligns better with the essence of ProtoPNet, as evidenced by different metric scores obtained from FunnyBirds. Therefore, we advocate using similarity maps as a visualization technique for prototypical parts networks in explainability evaluation benchmarks.
LucidPPN: Unambiguous Prototypical Parts Network for User-centric Interpretable Computer Vision
May 23, 2024



Prototypical parts networks combine the power of deep learning with the explainability of case-based reasoning to make accurate, interpretable decisions. They follow the this looks like that reasoning, representing each prototypical part with patches from training images. However, a single image patch comprises multiple visual features, such as color, shape, and texture, making it difficult for users to identify which feature is important to the model. To reduce this ambiguity, we introduce the Lucid Prototypical Parts Network (LucidPPN), a novel prototypical parts network that separates color prototypes from other visual features. Our method employs two reasoning branches: one for non-color visual features, processing grayscale images, and another focusing solely on color information. This separation allows us to clarify whether the model's decisions are based on color, shape, or texture. Additionally, LucidPPN identifies prototypical parts corresponding to semantic parts of classified objects, making comparisons between data classes more intuitive, e.g., when two bird species might differ primarily in belly color. Our experiments demonstrate that the two branches are complementary and together achieve results comparable to baseline methods. More importantly, LucidPPN generates less ambiguous prototypical parts, enhancing user understanding.