 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkill Generalization with Verbs
Oct 18, 2024



It is imperative that robots can understand natural language commands issued by humans. Such commands typically contain verbs that signify what action should be performed on a given object and that are applicable to many objects. We propose a method for generalizing manipulation skills to novel objects using verbs. Our method learns a probabilistic classifier that determines whether a given object trajectory can be described by a specific verb. We show that this classifier accurately generalizes to novel object categories with an average accuracy of 76.69% across 13 object categories and 14 verbs. We then perform policy search over the object kinematics to find an object trajectory that maximizes classifier prediction for a given verb. Our method allows a robot to generate a trajectory for a novel object based on a verb, which can then be used as input to a motion planner. We show that our model can generate trajectories that are usable for executing five verb commands applied to novel instances of two different object categories on a real robot.
Planning with Large Language Models via Corrective Re-prompting
Nov 17, 2022
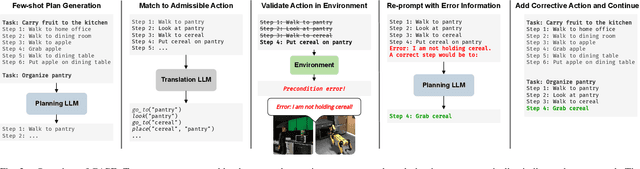
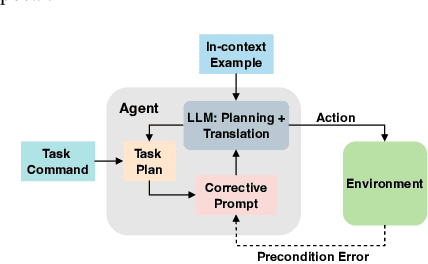
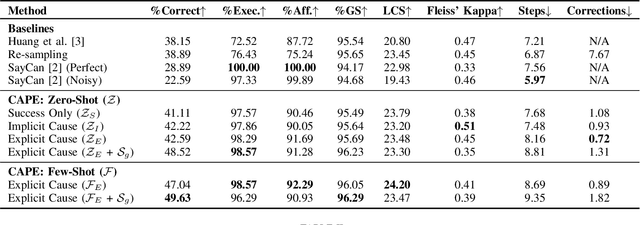
Extracting the common sense knowledge present in Large Language Models (LLMs) offers a path to designing intelligent, embodied agents. Related works have queried LLMs with a wide-range of contextual information, such as goals, sensor observations and scene descriptions, to generate high-level action plans for specific tasks; however these approaches often involve human intervention or additional machinery to enable sensor-motor interactions. In this work, we propose a prompting-based strategy for extracting executable plans from an LLM, which leverages a novel and readily-accessible source of information: precondition errors. Our approach assumes that actions are only afforded execution in certain contexts, i.e., implicit preconditions must be met for an action to execute (e.g., a door must be unlocked to open it), and that the embodied agent has the ability to determine if the action is/is not executable in the current context (e.g., detect if a precondition error is present). When an agent is unable to execute an action, our approach re-prompts the LLM with precondition error information to extract an executable corrective action to achieve the intended goal in the current context. We evaluate our approach in the VirtualHome simulation environment on 88 different tasks and 7 scenes. We evaluate different prompt templates and compare to methods that naively re-sample actions from the LLM. Our approach, using precondition errors, improves executability and semantic correctness of plans, while also reducing the number of re-prompts required when querying actions.
Long-Horizon Task and Motion Planning with Functional Object-Oriented Networks
Jul 12, 2022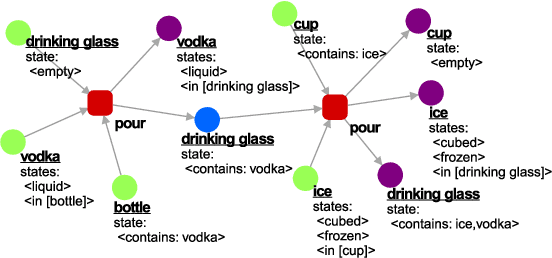
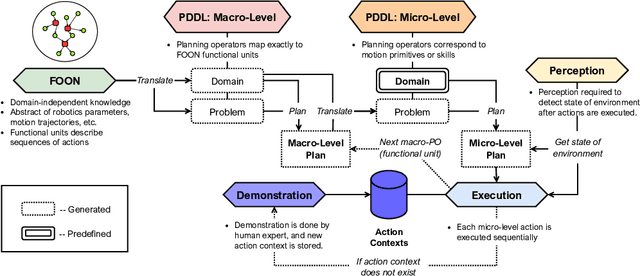
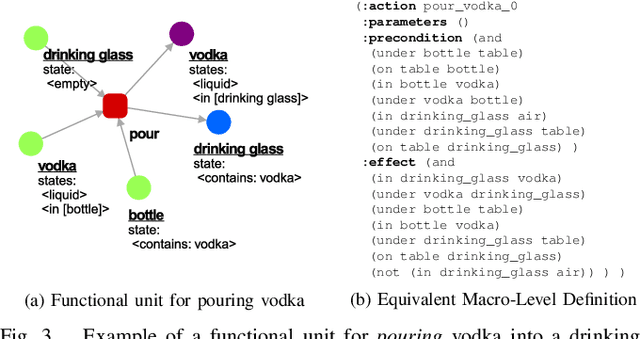
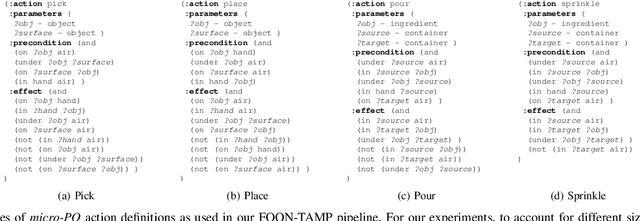
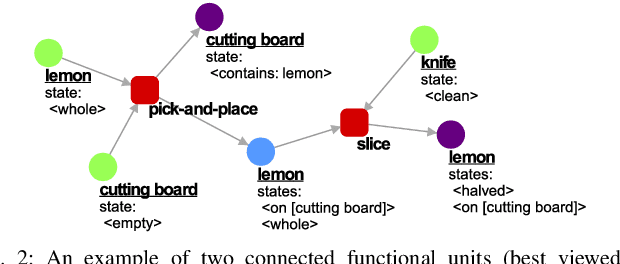
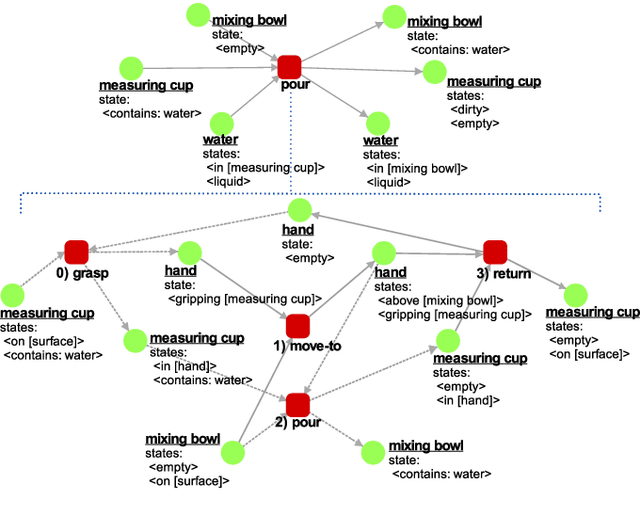
Following work on joint object-action representations, functional object-oriented networks (FOON) were introduced as a knowledge graph representation for robots. Taking the form of a bipartite graph, a FOON contains symbolic (high-level) concepts useful to a robot's understanding of tasks and its environment for object-level planning. Prior to this paper, little has been done to demonstrate how task plans acquired from FOON via task tree retrieval can be executed by a robot, as the concepts in a FOON are too abstract for immediate execution. We propose a hierarchical task planning approach that translates a FOON graph into a PDDL-based representation of domain knowledge for manipulation planning. As a result of this process, a task plan can be acquired that a robot can execute from start to end, leveraging the use of action contexts and skills in the form of dynamic movement primitives (DMP). We demonstrate the entire pipeline from planning to execution using CoppeliaSim and show how learned action contexts can be extended to never-before-seen scenarios.
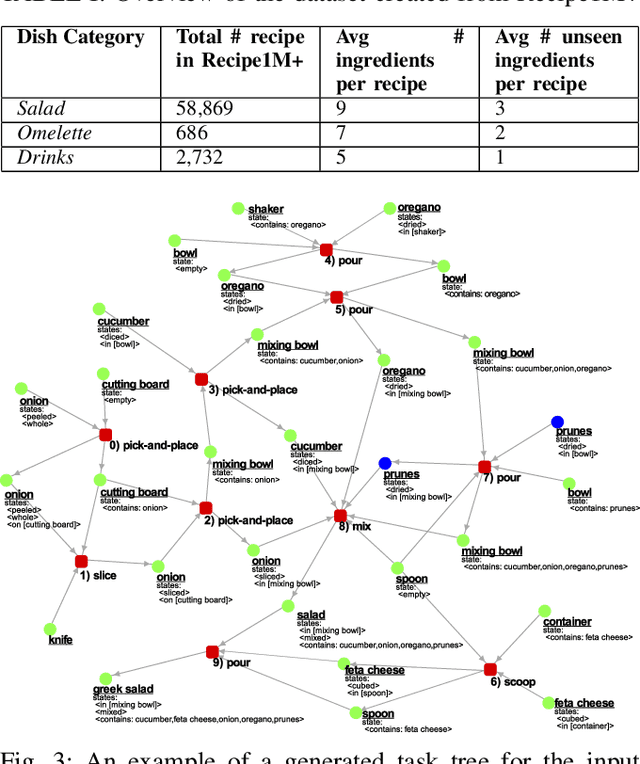
Approximate Task Tree Retrieval in a Knowledge Network for Robotic Cooking
Jul 08, 2022

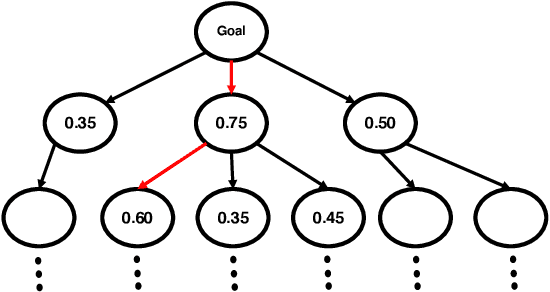

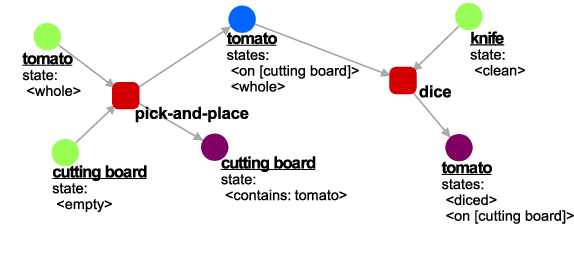
Flexible task planning continues to pose a difficult challenge for robots, where a robot is unable to creatively adapt their task plans to new or unseen problems, which is mainly due to the limited knowledge it has about its actions and world. Motivated by a human's ability to adapt, we explore how task plans from a knowledge graph, known as the Functional Object- Oriented Network (FOON), can be generated for novel problems requiring concepts that are not readily available to the robot in its knowledge base. Knowledge from 140 cooking recipes are structured in a FOON knowledge graph, which is used for acquiring task plan sequences known as task trees. Task trees can be modified to replicate recipes in a FOON knowledge graph format, which can be useful for enriching FOON with new recipes containing unknown object and state combinations, by relying upon semantic similarity. We demonstrate the power of task tree generation to create task trees with never-before-seen ingredient and state combinations as seen in recipes from the Recipe1M+ dataset, with which we evaluate the quality of the trees based on how accurately they depict newly added ingredients. Our experimental results show that our system is able to provide task sequences with 76% correctness.
Grounding of the Functional Object-Oriented Network in Industrial Tasks
Apr 05, 2022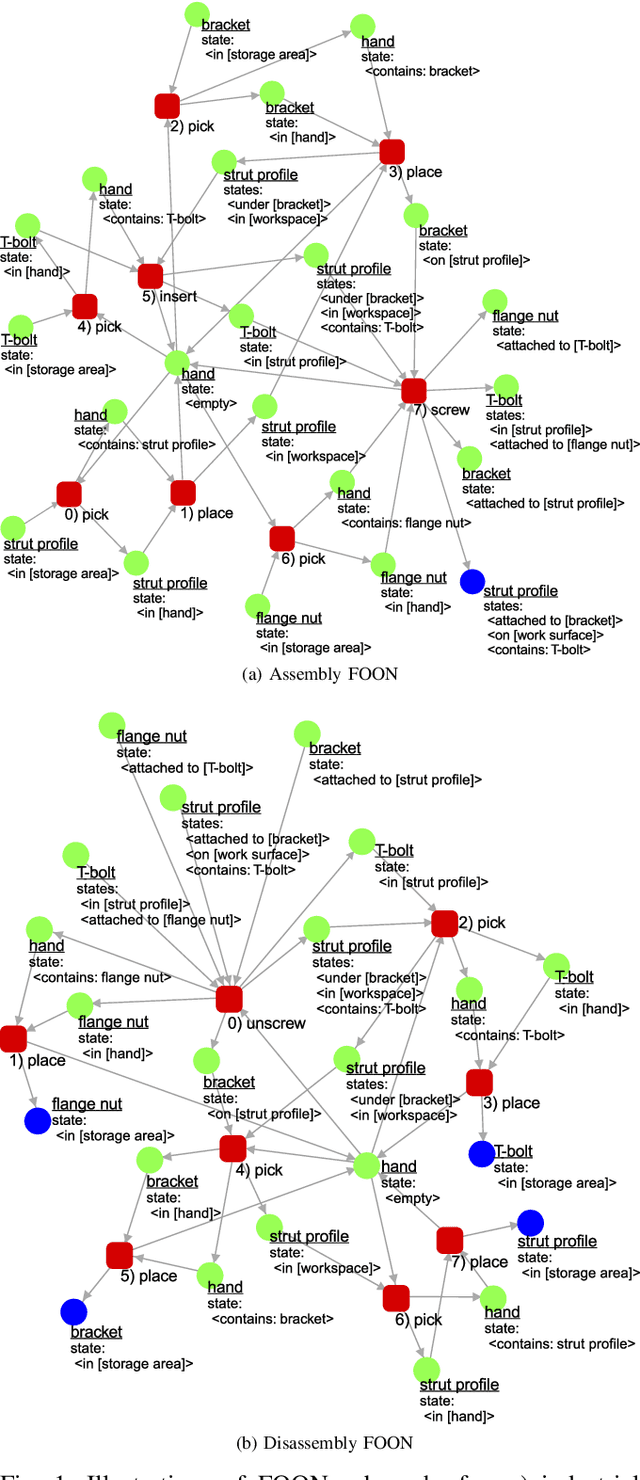
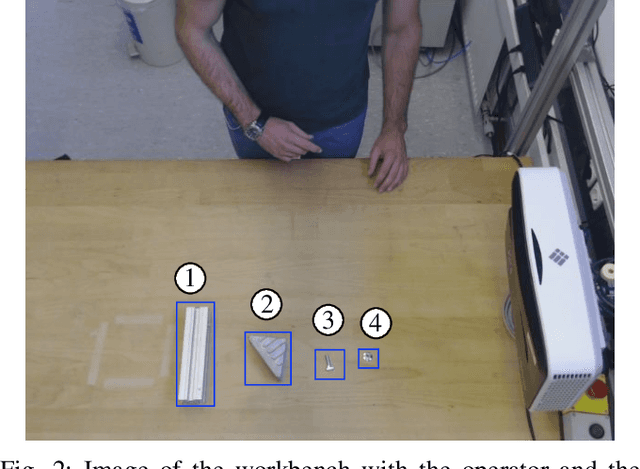
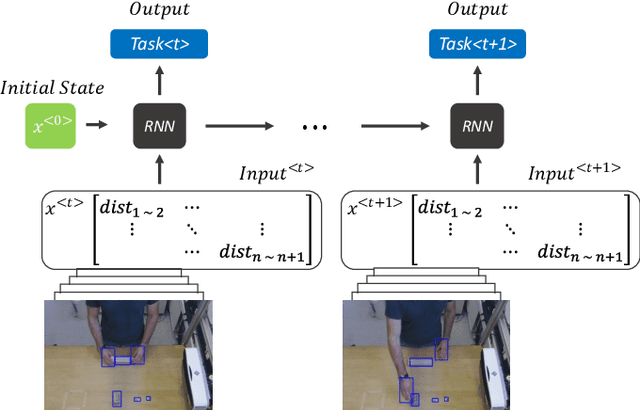
In this preliminary work, we propose to design an activity recognition system that is suitable for Industrie 4.0 (I4.0) applications, especially focusing on Learning from Demonstration (LfD) in collaborative robot tasks. More precisely, we focus on the issue of data exchange between an activity recognition system and a collaborative robotic system. We propose an activity recognition system with linked data using functional object-oriented network (FOON) to facilitate industrial use cases. Initially, we drafted a FOON for our use case. Afterwards, an action is estimated by using object and hand recognition systems coupled with a recurrent neural network, which refers to FOON objects and states. Finally, the detected action is shared via a context broker using an existing linked data model, thus enabling the robotic system to interpret the action and execute it afterwards. Our initial results show that FOON can be used for an industrial use case and that we can use existing linked data models in LfD applications.
Functional Task Tree Generation from a Knowledge Graph to Solve Unseen Problems
Dec 04, 2021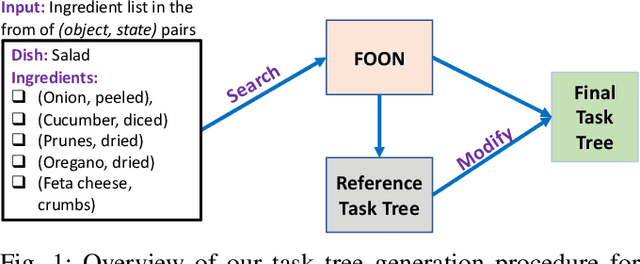

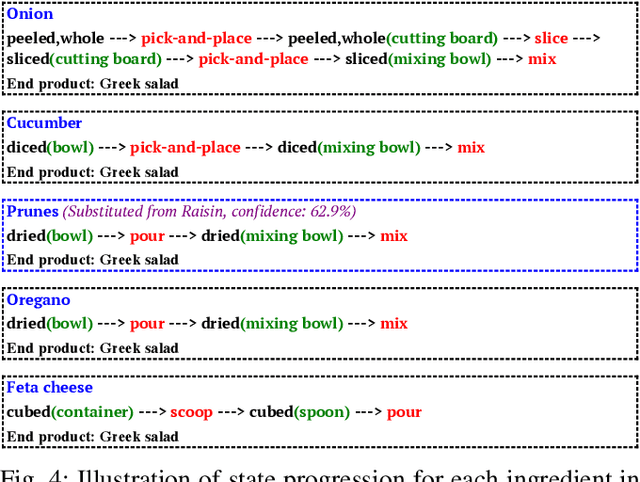
A major component for developing intelligent and autonomous robots is a suitable knowledge representation, from which a robot can acquire knowledge about its actions or world. However, unlike humans, robots cannot creatively adapt to novel scenarios, as their knowledge and environment are rigidly defined. To address the problem of producing novel and flexible task plans called task trees, we explore how we can derive plans with concepts not originally in the robot's knowledge base. Existing knowledge in the form of a knowledge graph is used as a base of reference to create task trees that are modified with new object or state combinations. To demonstrate the flexibility of our method, we randomly selected recipes from the Recipe1M+ dataset and generated their task trees. The task trees were then thoroughly checked with a visualization tool that portrays how each ingredient changes with each action to produce the desired meal. Our results indicate that the proposed method can produce task plans with high accuracy even for never-before-seen ingredient combinations.
Evaluating Recipes Generated from Functional Object-Oriented Network
Jun 01, 2021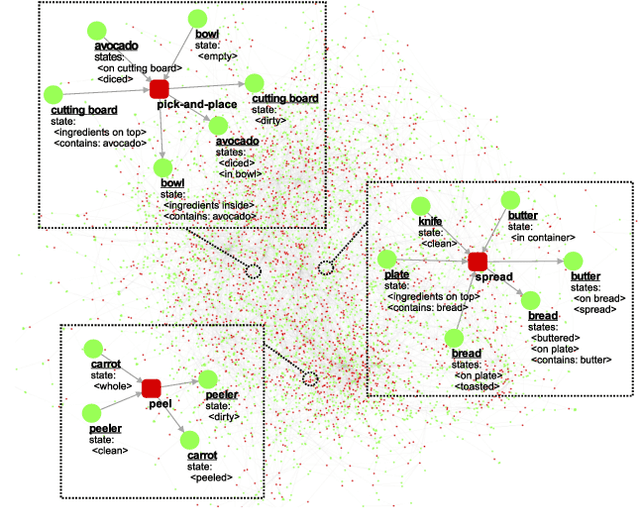
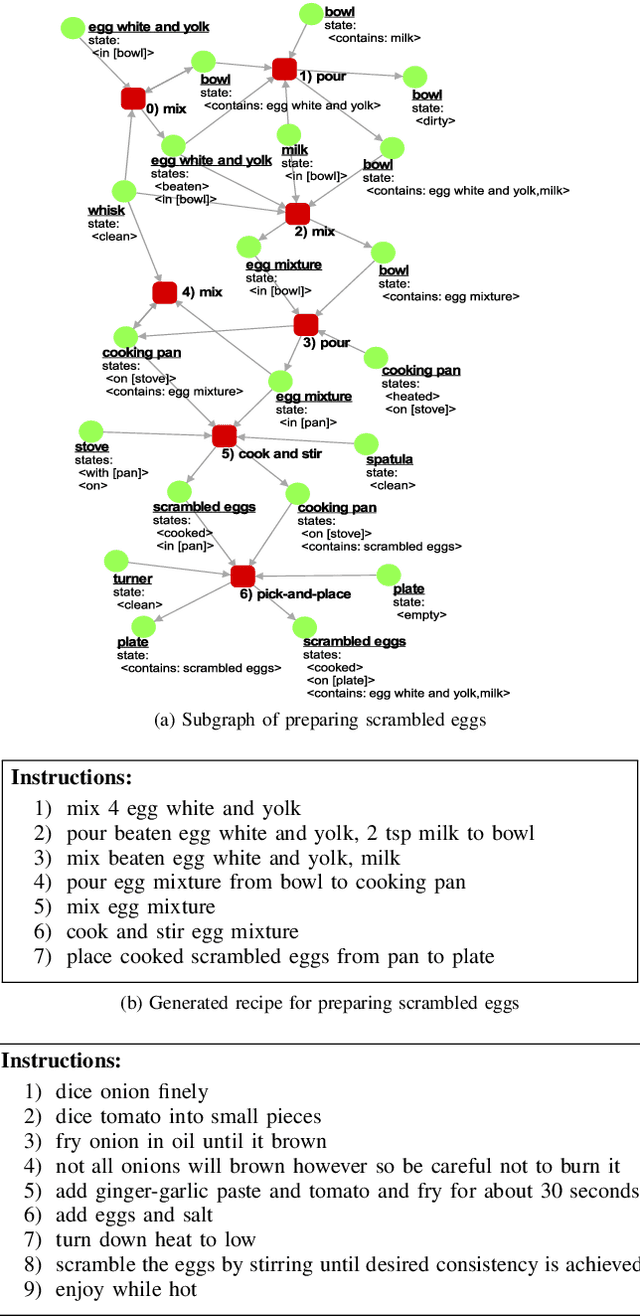
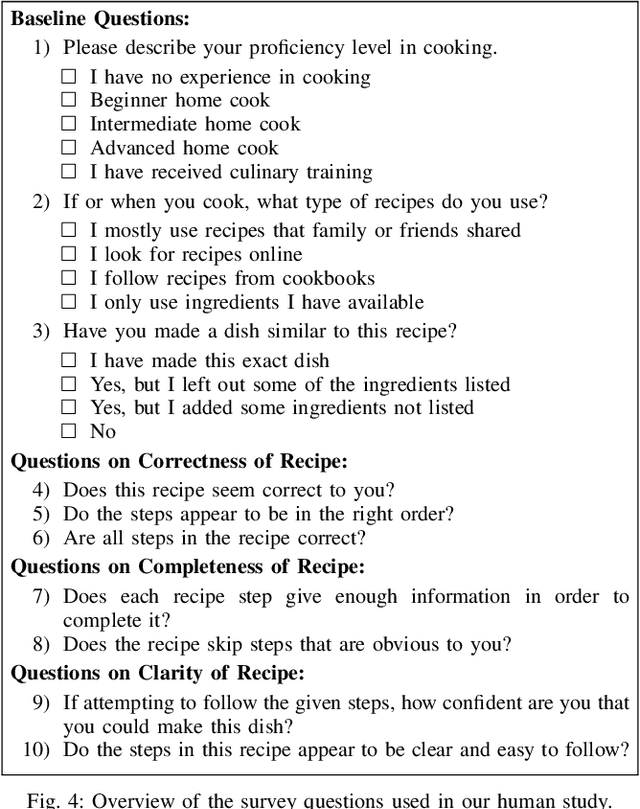
The functional object-oriented network (FOON) has been introduced as a knowledge representation, which takes the form of a graph, for symbolic task planning. To get a sequential plan for a manipulation task, a robot can obtain a task tree through a knowledge retrieval process from the FOON. To evaluate the quality of an acquired task tree, we compare it with a conventional form of task knowledge, such as recipes or manuals. We first automatically convert task trees to recipes, and we then compare them with the human-created recipes in the Recipe1M+ dataset via a survey. Our preliminary study finds no significant difference between the recipes in Recipe1M+ and the recipes generated from FOON task trees in terms of correctness, completeness, and clarity.
A Road-map to Robot Task Execution with the Functional Object-Oriented Network
Jun 01, 2021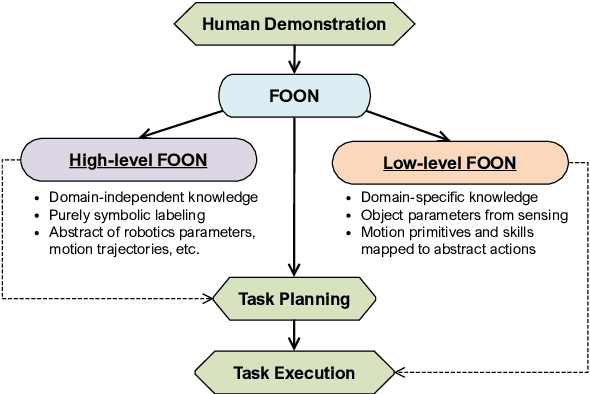

Following work on joint object-action representations, the functional object-oriented network (FOON) was introduced as a knowledge graph representation for robots. Taking the form of a bipartite graph, a FOON contains symbolic or high-level information that would be pertinent to a robot's understanding of its environment and tasks in a way that mirrors human understanding of actions. In this work, we outline a road-map for future development of FOON and its application in robotic systems for task planning as well as knowledge acquisition from demonstration. We propose preliminary ideas to show how a FOON can be created in a real-world scenario with a robot and human teacher in a way that can jointly augment existing knowledge in a FOON and teach a robot the skills it needs to replicate the demonstrated actions and solve a given manipulation problem.
Developing Motion Code Embedding for Action Recognition in Videos
Dec 10, 2020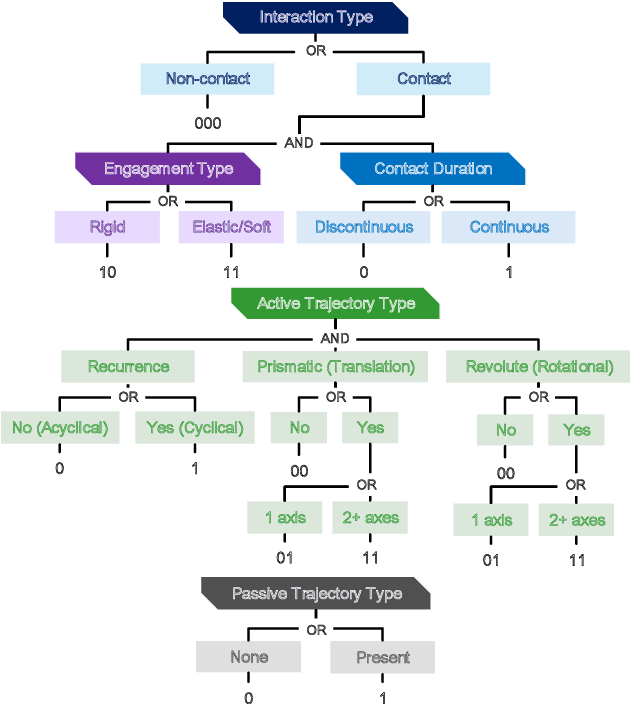
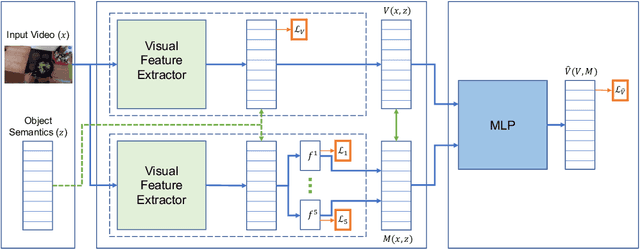


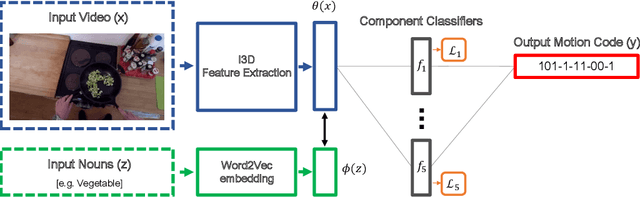
In this work, we propose a motion embedding strategy known as motion codes, which is a vectorized representation of motions based on a manipulation's salient mechanical attributes. These motion codes provide a robust motion representation, and they are obtained using a hierarchy of features called the motion taxonomy. We developed and trained a deep neural network model that combines visual and semantic features to identify the features found in our motion taxonomy to embed or annotate videos with motion codes. To demonstrate the potential of motion codes as features for machine learning tasks, we integrated the extracted features from the motion embedding model into the current state-of-the-art action recognition model. The obtained model achieved higher accuracy than the baseline model for the verb classification task on egocentric videos from the EPIC-KITCHENS dataset.
Estimating Motion Codes from Demonstration Videos
Jul 31, 2020
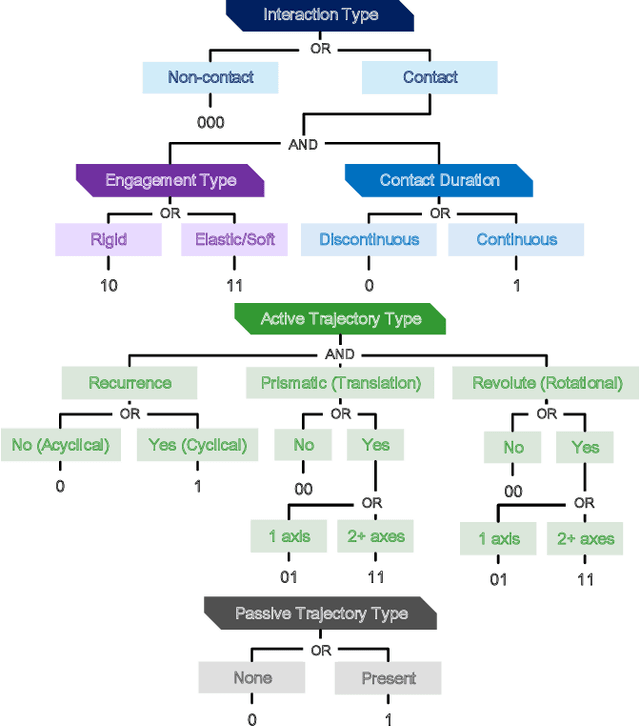

A motion taxonomy can encode manipulations as a binary-encoded representation, which we refer to as motion codes. These motion codes innately represent a manipulation action in an embedded space that describes the motion's mechanical features, including contact and trajectory type. The key advantage of using motion codes for embedding is that motions can be more appropriately defined with robotic-relevant features, and their distances can be more reasonably measured using these motion features. In this paper, we develop a deep learning pipeline to extract motion codes from demonstration videos in an unsupervised manner so that knowledge from these videos can be properly represented and used for robots. Our evaluations show that motion codes can be extracted from demonstrations of action in the EPIC-KITCHENS dataset.