 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating Motion Codes from Demonstration Videos
Paper and Code
Jul 31, 2020
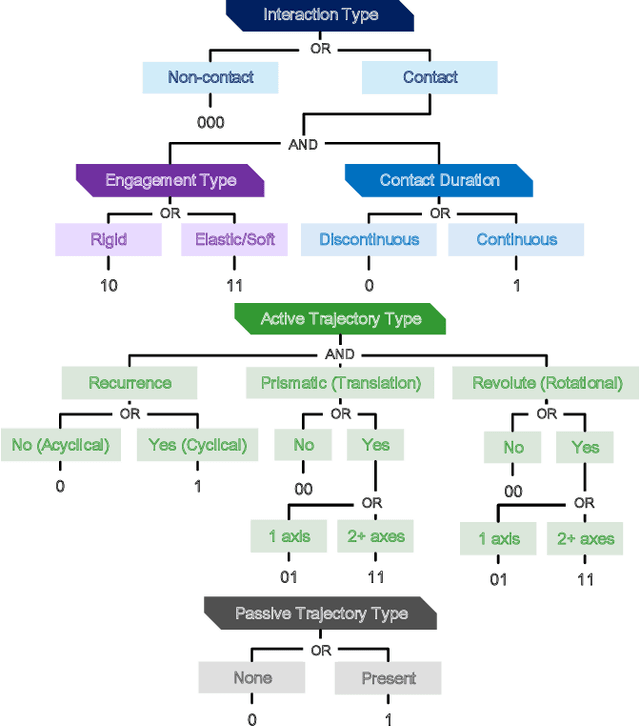
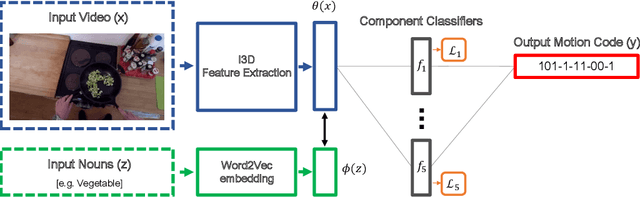

A motion taxonomy can encode manipulations as a binary-encoded representation, which we refer to as motion codes. These motion codes innately represent a manipulation action in an embedded space that describes the motion's mechanical features, including contact and trajectory type. The key advantage of using motion codes for embedding is that motions can be more appropriately defined with robotic-relevant features, and their distances can be more reasonably measured using these motion features. In this paper, we develop a deep learning pipeline to extract motion codes from demonstration videos in an unsupervised manner so that knowledge from these videos can be properly represented and used for robots. Our evaluations show that motion codes can be extracted from demonstrations of action in the EPIC-KITCHENS dataset.