 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping Motion Code Embedding for Action Recognition in Videos
Dec 10, 2020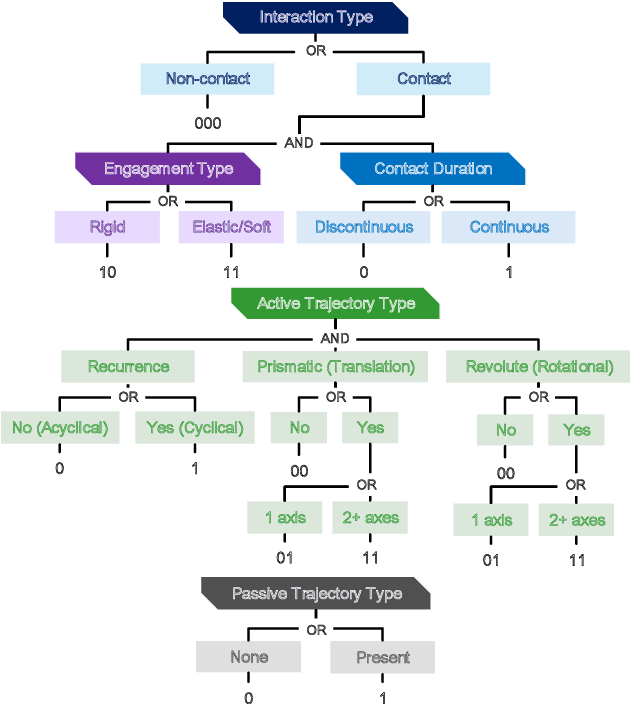


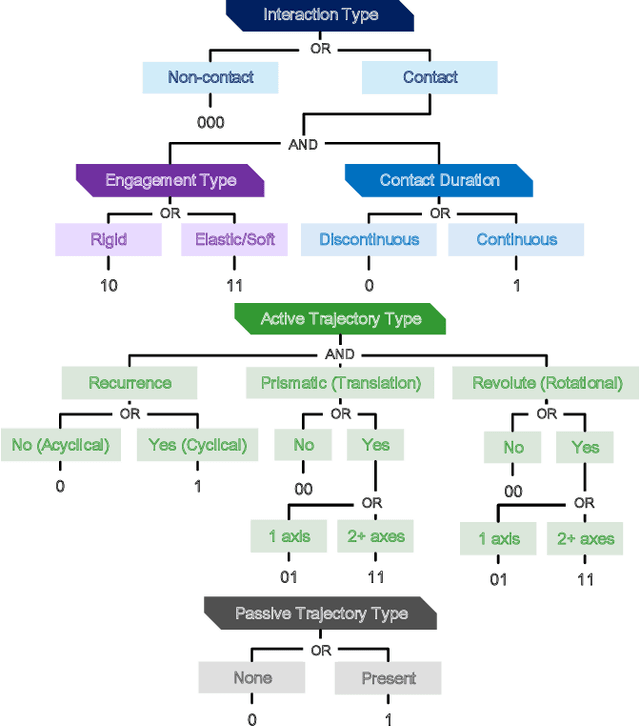
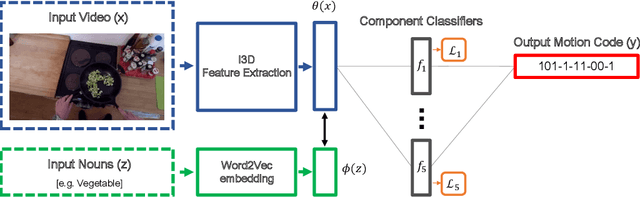
In this work, we propose a motion embedding strategy known as motion codes, which is a vectorized representation of motions based on a manipulation's salient mechanical attributes. These motion codes provide a robust motion representation, and they are obtained using a hierarchy of features called the motion taxonomy. We developed and trained a deep neural network model that combines visual and semantic features to identify the features found in our motion taxonomy to embed or annotate videos with motion codes. To demonstrate the potential of motion codes as features for machine learning tasks, we integrated the extracted features from the motion embedding model into the current state-of-the-art action recognition model. The obtained model achieved higher accuracy than the baseline model for the verb classification task on egocentric videos from the EPIC-KITCHENS dataset.
Estimating Motion Codes from Demonstration Videos
Jul 31, 2020

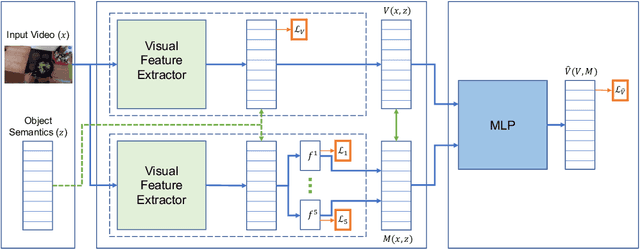
A motion taxonomy can encode manipulations as a binary-encoded representation, which we refer to as motion codes. These motion codes innately represent a manipulation action in an embedded space that describes the motion's mechanical features, including contact and trajectory type. The key advantage of using motion codes for embedding is that motions can be more appropriately defined with robotic-relevant features, and their distances can be more reasonably measured using these motion features. In this paper, we develop a deep learning pipeline to extract motion codes from demonstration videos in an unsupervised manner so that knowledge from these videos can be properly represented and used for robots. Our evaluations show that motion codes can be extracted from demonstrations of action in the EPIC-KITCHENS dataset.