 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Horizon Task and Motion Planning with Functional Object-Oriented Networks
Paper and Code
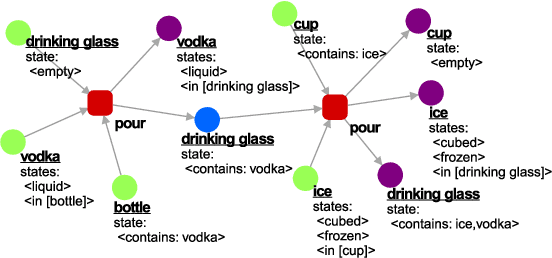
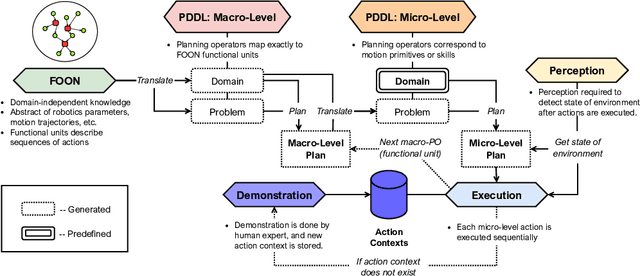
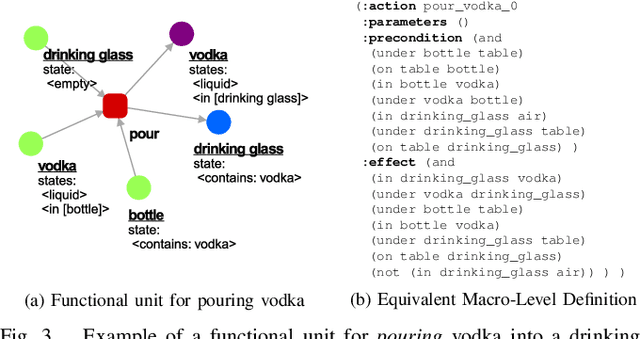
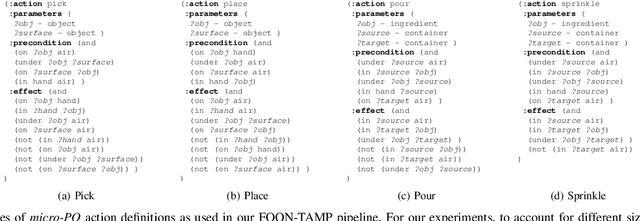
Following work on joint object-action representations, functional object-oriented networks (FOON) were introduced as a knowledge graph representation for robots. Taking the form of a bipartite graph, a FOON contains symbolic (high-level) concepts useful to a robot's understanding of tasks and its environment for object-level planning. Prior to this paper, little has been done to demonstrate how task plans acquired from FOON via task tree retrieval can be executed by a robot, as the concepts in a FOON are too abstract for immediate execution. We propose a hierarchical task planning approach that translates a FOON graph into a PDDL-based representation of domain knowledge for manipulation planning. As a result of this process, a task plan can be acquired that a robot can execute from start to end, leveraging the use of action contexts and skills in the form of dynamic movement primitives (DMP). We demonstrate the entire pipeline from planning to execution using CoppeliaSim and show how learned action contexts can be extended to never-before-seen scenarios.