 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrounding of the Functional Object-Oriented Network in Industrial Tasks
Apr 05, 2022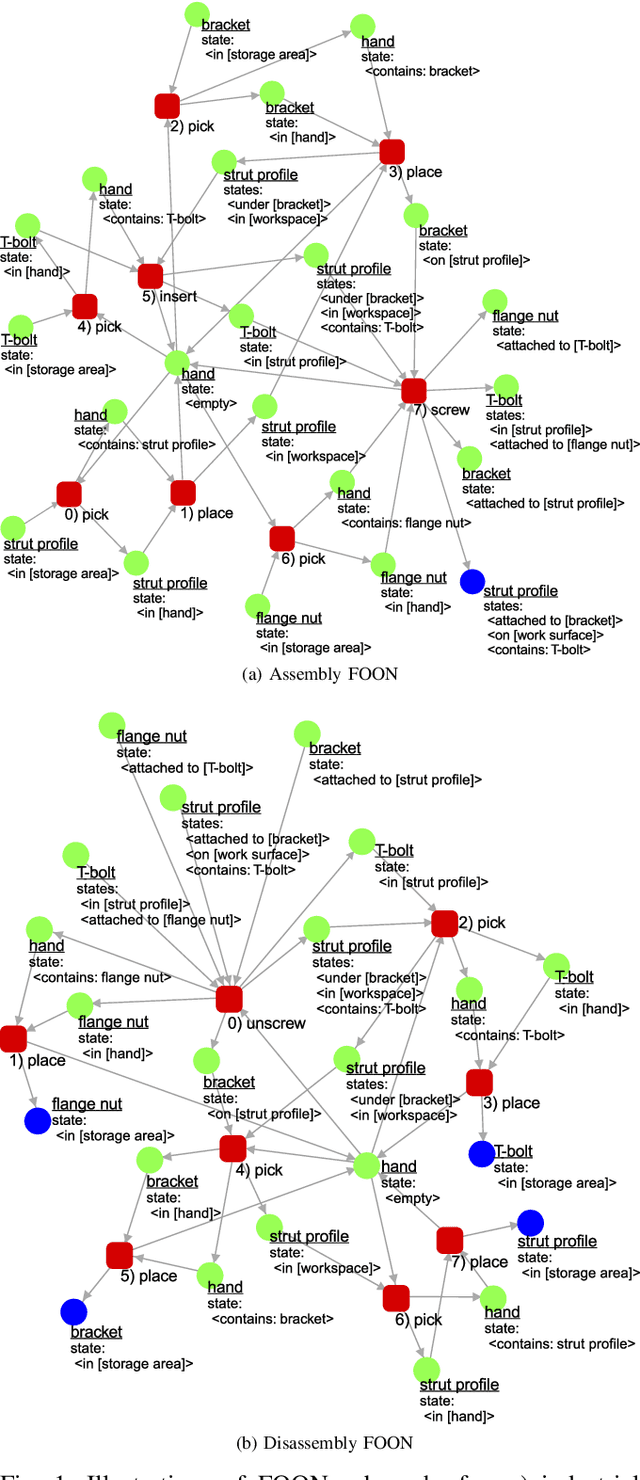
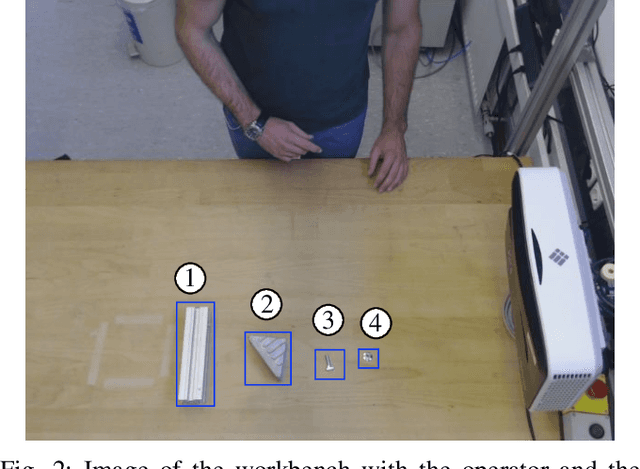
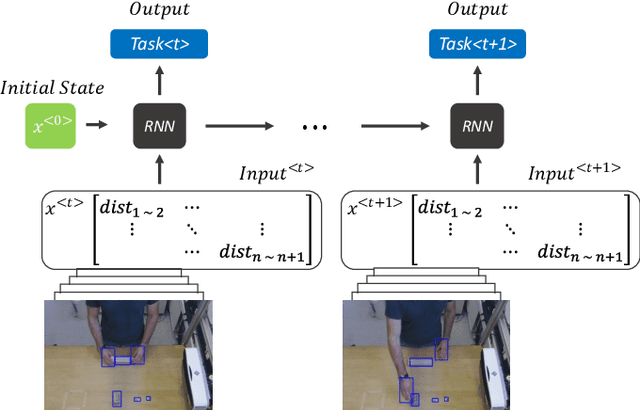
In this preliminary work, we propose to design an activity recognition system that is suitable for Industrie 4.0 (I4.0) applications, especially focusing on Learning from Demonstration (LfD) in collaborative robot tasks. More precisely, we focus on the issue of data exchange between an activity recognition system and a collaborative robotic system. We propose an activity recognition system with linked data using functional object-oriented network (FOON) to facilitate industrial use cases. Initially, we drafted a FOON for our use case. Afterwards, an action is estimated by using object and hand recognition systems coupled with a recurrent neural network, which refers to FOON objects and states. Finally, the detected action is shared via a context broker using an existing linked data model, thus enabling the robotic system to interpret the action and execute it afterwards. Our initial results show that FOON can be used for an industrial use case and that we can use existing linked data models in LfD applications.
Capability-based Frameworks for Industrial Robot Skills: a Survey
Mar 01, 2022

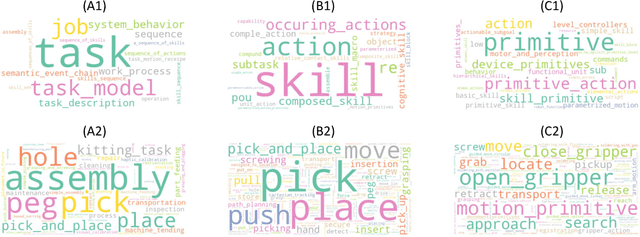

The research community is puzzled with words like skill, action, atomic unit and others when trying to describe robot capabilities. However, for giving the possibility to integrate such in the industrial scenario a standardization of their description is necessary. This work, through a structured review approach, tries to identify commonalities in the research community. From this review it was possible to perceive that most of the industrially focused research work targets simple capabilities like pick and place, the large amount of authors agree on a structure consisting of task, skill and primitive, the Robot Operating System is a common framework both in industrial and non-industrial domains and skills are a main enabler for high mix - low volume productions.