 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Robot Programming for Surface Finishing via Task-Centric Mixed Reality Interfaces
Dec 29, 2025Lengthy setup processes that require robotics expertise remain a major barrier to deploying robots for tasks involving high product variability and small batch sizes. As a result, collaborative robots, despite their advanced sensing and control capabilities, are rarely used for surface finishing in small-scale craft and manufacturing settings. To address this gap, we propose a novel robot programming approach that enables non-experts to intuitively program robots through interactive, task-focused workflows. For that, we developed a new surface segmentation algorithm that incorporates human input to identify and refine workpiece regions for processing. Throughout the programming process, users receive continuous visual feedback on the robot's learned model, enabling them to iteratively refine the segmentation result. Based on the segmented surface model, a robot trajectory is generated to cover the desired processing area. We evaluated multiple interaction designs across two comprehensive user studies to derive an optimal interface that significantly reduces user workload, improves usability and enables effective task programming even for users with limited practical experience.
Capability-based Frameworks for Industrial Robot Skills: a Survey
Mar 01, 2022

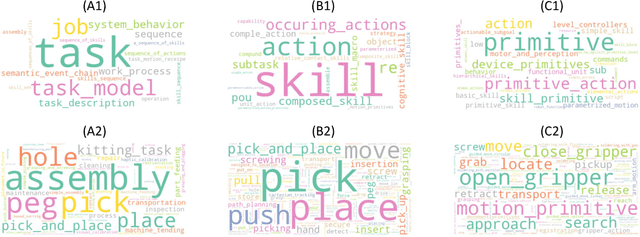

The research community is puzzled with words like skill, action, atomic unit and others when trying to describe robot capabilities. However, for giving the possibility to integrate such in the industrial scenario a standardization of their description is necessary. This work, through a structured review approach, tries to identify commonalities in the research community. From this review it was possible to perceive that most of the industrially focused research work targets simple capabilities like pick and place, the large amount of authors agree on a structure consisting of task, skill and primitive, the Robot Operating System is a common framework both in industrial and non-industrial domains and skills are a main enabler for high mix - low volume productions.