 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Road-map to Robot Task Execution with the Functional Object-Oriented Network
Paper and Code
Jun 01, 2021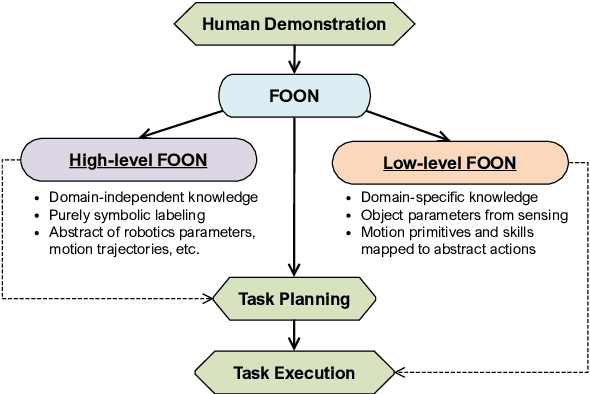
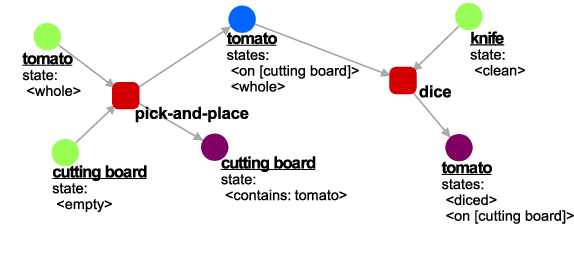

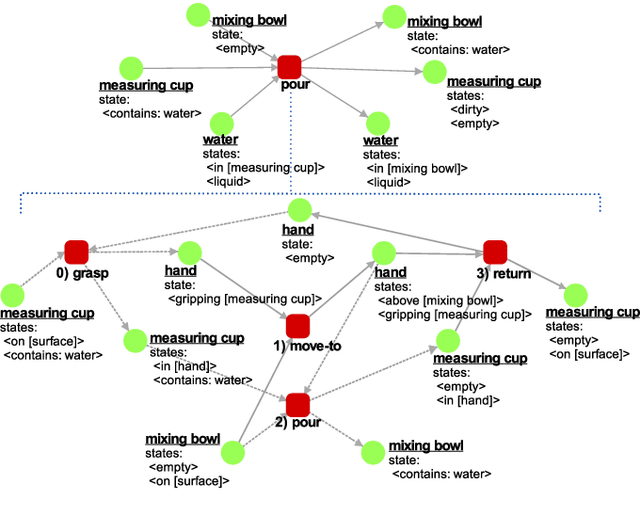
Following work on joint object-action representations, the functional object-oriented network (FOON) was introduced as a knowledge graph representation for robots. Taking the form of a bipartite graph, a FOON contains symbolic or high-level information that would be pertinent to a robot's understanding of its environment and tasks in a way that mirrors human understanding of actions. In this work, we outline a road-map for future development of FOON and its application in robotic systems for task planning as well as knowledge acquisition from demonstration. We propose preliminary ideas to show how a FOON can be created in a real-world scenario with a robot and human teacher in a way that can jointly augment existing knowledge in a FOON and teach a robot the skills it needs to replicate the demonstrated actions and solve a given manipulation problem.