 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Exploration of Stopword Probabilities in Topic Models
Jan 17, 2025



Stopword removal is a critical stage in many Machine Learning methods but often receives little consideration, it interferes with the model visualizations and disrupts user confidence. Inappropriately chosen or hastily omitted stopwords not only lead to suboptimal performance but also significantly affect the quality of models, thus reducing the willingness of practitioners and stakeholders to rely on the output visualizations. This paper proposes a novel extraction method that provides a corpus-specific probabilistic estimation of stopword likelihood and an interactive visualization system to support their analysis. We evaluated our approach and interface using real-world data, a commonly used Machine Learning method (Topic Modelling), and a comprehensive qualitative experiment probing user confidence. The results of our work show that our system increases user confidence in the credibility of topic models by (1) returning reasonable probabilities, (2) generating an appropriate and representative extension of common stopword lists, and (3) providing an adjustable threshold for estimating and analyzing stopwords visually. Finally, we discuss insights, recommendations, and best practices to support practitioners while improving the output of Machine Learning methods and topic model visualizations with robust stopword analysis and removal.
Three Approaches to the Automation of Laser System Alignment and Their Resource Implications: A Case Study
Sep 17, 2024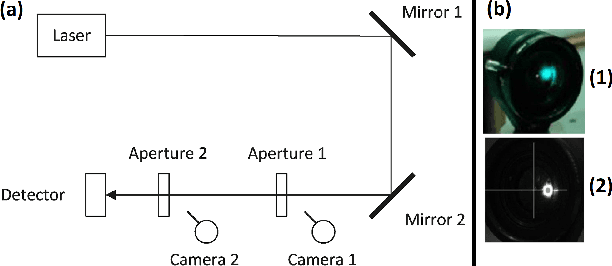
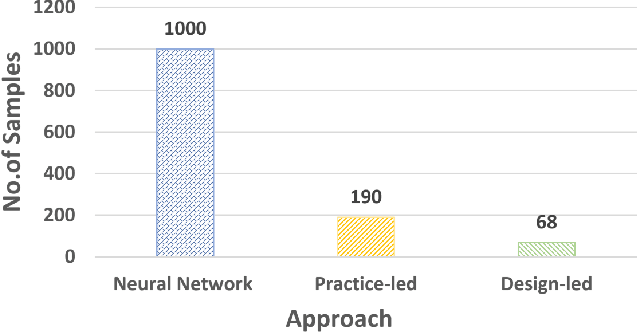
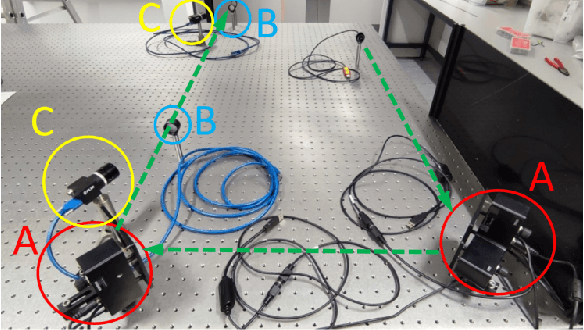
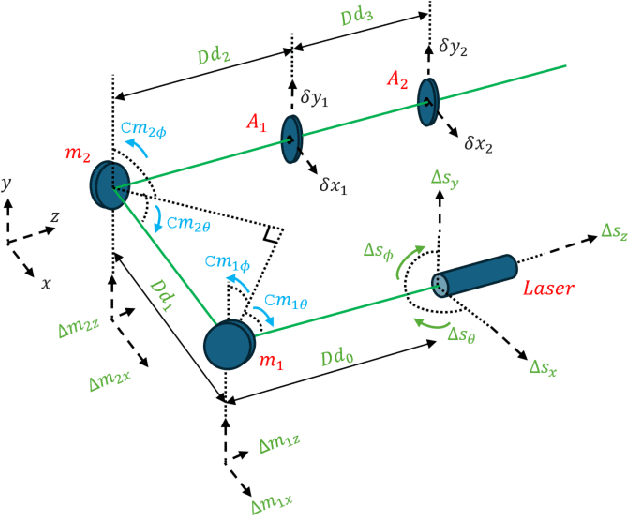
The alignment of optical systems is a critical step in their manufacture. Alignment normally requires considerable knowledge and expertise of skilled operators. The automation of such processes has several potential advantages, but requires additional resource and upfront costs. Through a case study of a simple two mirror system we identify and examine three different automation approaches. They are: artificial neural networks; practice-led, which mimics manual alignment practices; and design-led, modelling from first principles. We find that these approaches make use of three different types of knowledge 1) basic system knowledge (of controls, measurements and goals); 2) behavioural skills and expertise, and 3) fundamental system design knowledge. We demonstrate that the different automation approaches vary significantly in human resources, and measurement sampling budgets. This will have implications for practitioners and management considering the automation of such tasks.
Feeding the Coffee Habit: A Longitudinal Study of a Robo-Barista
Sep 06, 2023Studying Human-Robot Interaction over time can provide insights into what really happens when a robot becomes part of people's everyday lives. "In the Wild" studies inform the design of social robots, such as for the service industry, to enable them to remain engaging and useful beyond the novelty effect and initial adoption. This paper presents an "In the Wild" experiment where we explored the evolution of interaction between users and a Robo-Barista. We show that perceived trust and prior attitudes are both important factors associated with the usefulness, adaptability and likeability of the Robo-Barista. A combination of interaction features and user attributes are used to predict user satisfaction. Qualitative insights illuminated users' Robo-Barista experience and contribute to a number of lessons learned for future long-term studies.
Come Closer: The Effects of Robot Personality on Human Proxemics Behaviours
Sep 06, 2023



Social Robots in human environments need to be able to reason about their physical surroundings while interacting with people. Furthermore, human proxemics behaviours around robots can indicate how people perceive the robots and can inform robot personality and interaction design. Here, we introduce Charlie, a situated robot receptionist that can interact with people using verbal and non-verbal communication in a dynamic environment, where users might enter or leave the scene at any time. The robot receptionist is stationary and cannot navigate. Therefore, people have full control over their personal space as they are the ones approaching the robot. We investigated the influence of different apparent robot personalities on the proxemics behaviours of the humans. The results indicate that different types of robot personalities, specifically introversion and extroversion, can influence human proxemics behaviours. Participants maintained shorter distances with the introvert robot receptionist, compared to the extrovert robot. Interestingly, we observed that human-robot proxemics were not the same as typical human-human interpersonal distances, as defined in the literature. We therefore propose new proxemics zones for human-robot interaction.
We are all Individuals: The Role of Robot Personality and Human Traits in Trustworthy Interaction
Jul 28, 2023
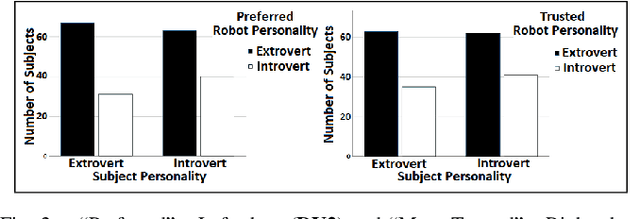
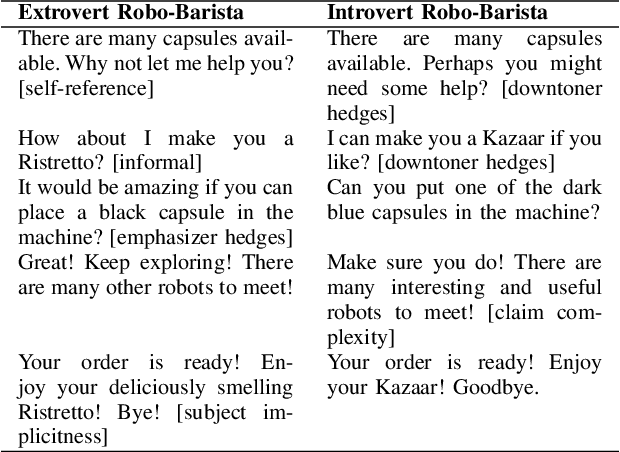
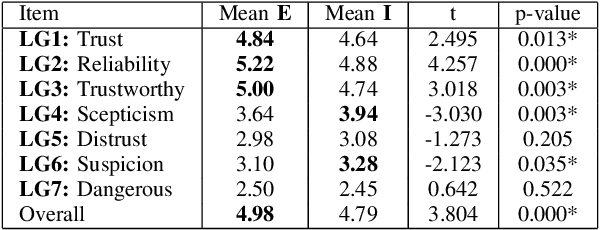
As robots take on roles in our society, it is important that their appearance, behaviour and personality are appropriate for the job they are given and are perceived favourably by the people with whom they interact. Here, we provide an extensive quantitative and qualitative study exploring robot personality but, importantly, with respect to individual human traits. Firstly, we show that we can accurately portray personality in a social robot, in terms of extroversion-introversion using vocal cues and linguistic features. Secondly, through garnering preferences and trust ratings for these different robot personalities, we establish that, for a Robo-Barista, an extrovert robot is preferred and trusted more than an introvert robot, regardless of the subject's own personality. Thirdly, we find that individual attitudes and predispositions towards robots do impact trust in the Robo-Baristas, and are therefore important considerations in addition to robot personality, roles and interaction context when designing any human-robot interaction study.
* 8 pages, RO-MAN'22, 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), August 2022, Naples, Italy
Robots in the Danger Zone: Exploring Public Perception through Engagement
Apr 01, 2020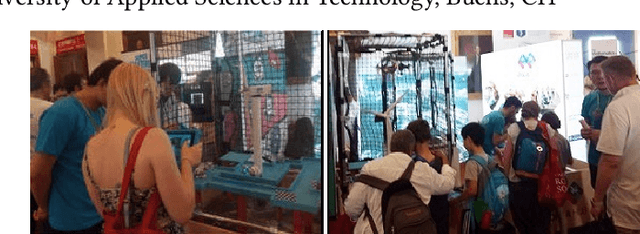
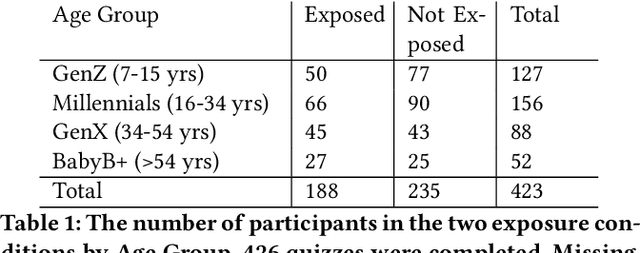
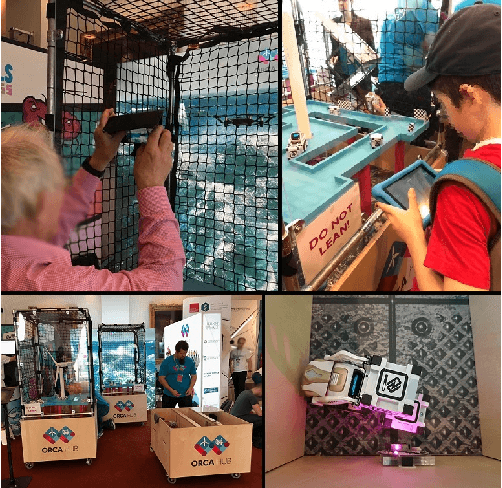
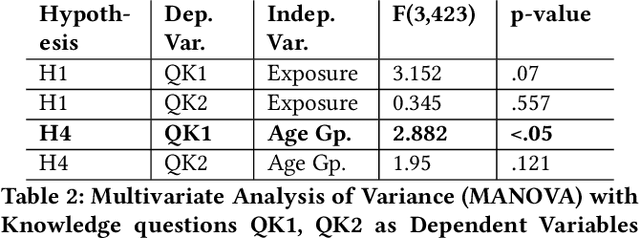
Public perceptions of Robotics and Artificial Intelligence (RAI) are important in the acceptance, uptake, government regulation and research funding of this technology. Recent research has shown that the public's understanding of RAI can be negative or inaccurate. We believe effective public engagement can help ensure that public opinion is better informed. In this paper, we describe our first iteration of a high throughput in-person public engagement activity. We describe the use of a light touch quiz-format survey instrument to integrate in-the-wild research participation into the engagement, allowing us to probe both the effectiveness of our engagement strategy, and public perceptions of the future roles of robots and humans working in dangerous settings, such as in the off-shore energy sector. We critique our methods and share interesting results into generational differences within the public's view of the future of Robotics and AI in hazardous environments. These findings include that older peoples' views about the future of robots in hazardous environments were not swayed by exposure to our exhibit, while the views of younger people were affected by our exhibit, leading us to consider carefully in future how to more effectively engage with and inform older people.
* Accepted in HRI 2020, Keywords: Human robot interaction, robotics, artificial intelligence, public engagement, public perceptions of robots, robotics and society
Challenges in Collaborative HRI for Remote Robot Teams
May 17, 2019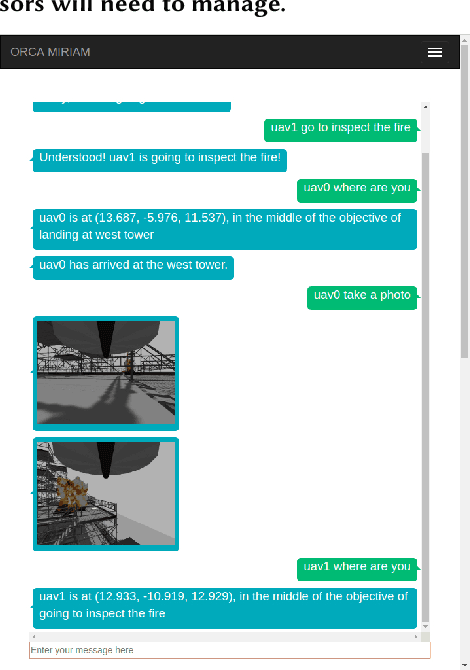

Collaboration between human supervisors and remote teams of robots is highly challenging, particularly in high-stakes, distant, hazardous locations, such as off-shore energy platforms. In order for these teams of robots to truly be beneficial, they need to be trusted to operate autonomously, performing tasks such as inspection and emergency response, thus reducing the number of personnel placed in harm's way. As remote robots are generally trusted less than robots in close-proximity, we present a solution to instil trust in the operator through a `mediator robot' that can exhibit social skills, alongside sophisticated visualisation techniques. In this position paper, we present general challenges and then take a closer look at one challenge in particular, discussing an initial study, which investigates the relationship between the level of control the supervisor hands over to the mediator robot and how this affects their trust. We show that the supervisor is more likely to have higher trust overall if their initial experience involves handing over control of the emergency situation to the robotic assistant. We discuss this result, here, as well as other challenges and interaction techniques for human-robot collaboration.
MIRIAM: A Multimodal Chat-Based Interface for Autonomous Systems
Mar 06, 2018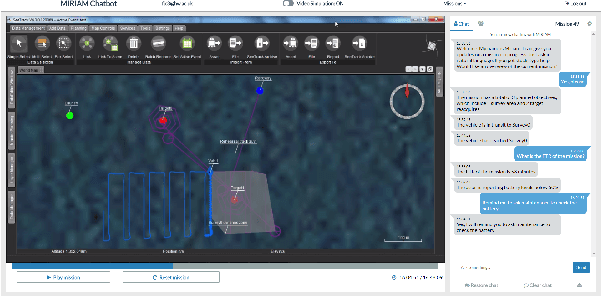
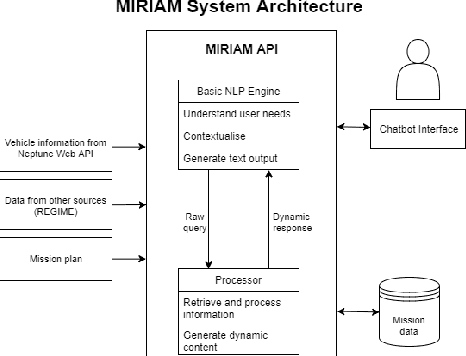
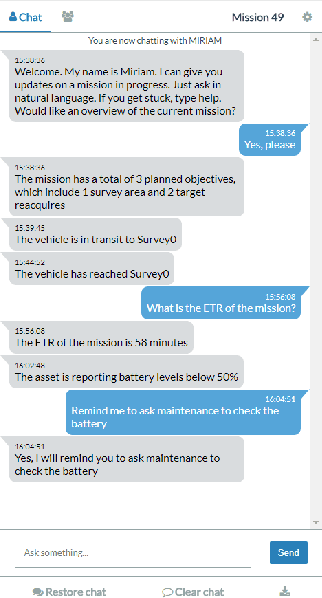
We present MIRIAM (Multimodal Intelligent inteRactIon for Autonomous systeMs), a multimodal interface to support situation awareness of autonomous vehicles through chat-based interaction. The user is able to chat about the vehicle's plan, objectives, previous activities and mission progress. The system is mixed initiative in that it pro-actively sends messages about key events, such as fault warnings. We will demonstrate MIRIAM using SeeByte's SeeTrack command and control interface and Neptune autonomy simulator.
The ORCA Hub: Explainable Offshore Robotics through Intelligent Interfaces
Mar 06, 2018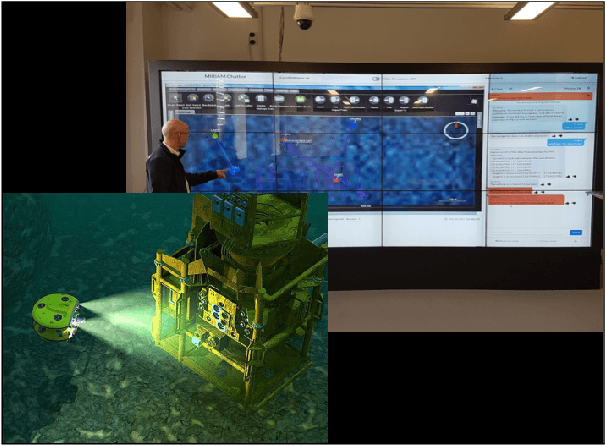
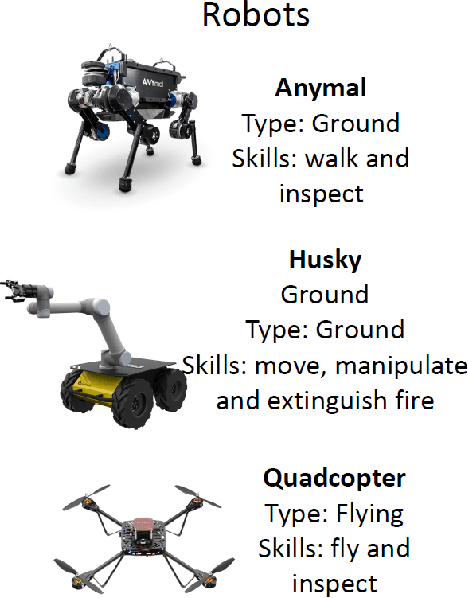
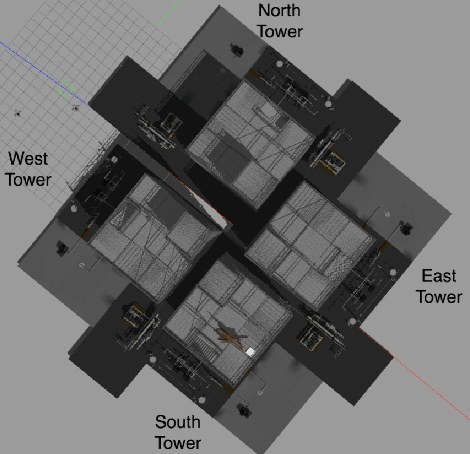
We present the UK Robotics and Artificial Intelligence Hub for Offshore Robotics for Certification of Assets (ORCA Hub), a 3.5 year EPSRC funded, multi-site project. The ORCA Hub vision is to use teams of robots and autonomous intelligent systems (AIS) to work on offshore energy platforms to enable cheaper, safer and more efficient working practices. The ORCA Hub will research, integrate, validate and deploy remote AIS solutions that can operate with existing and future offshore energy assets and sensors, interacting safely in autonomous or semi-autonomous modes in complex and cluttered environments, co-operating with remote operators. The goal is that through the use of such robotic systems offshore, the need for personnel will decrease. To enable this to happen, the remote operator will need a high level of situation awareness and key to this is the transparency of what the autonomous systems are doing and why. This increased transparency will facilitate a trusting relationship, which is particularly key in high-stakes, hazardous situations.
Explain Yourself: A Natural Language Interface for Scrutable Autonomous Robots
Mar 06, 2018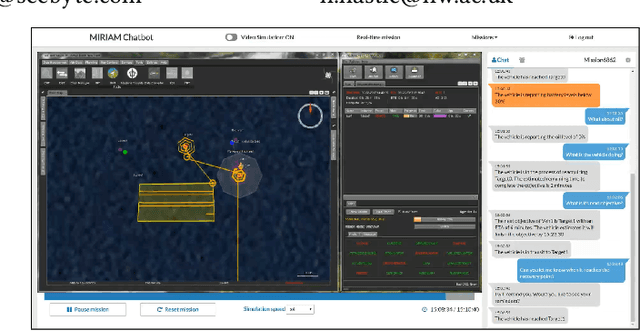
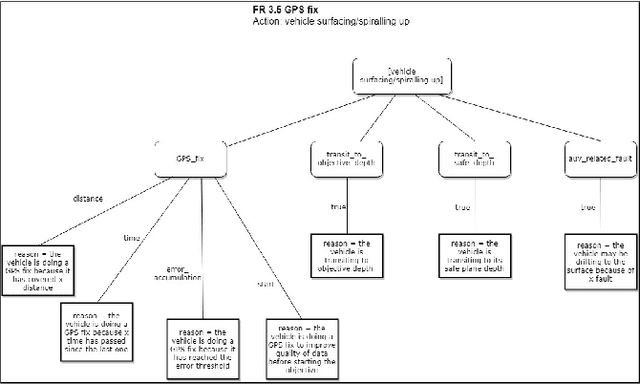
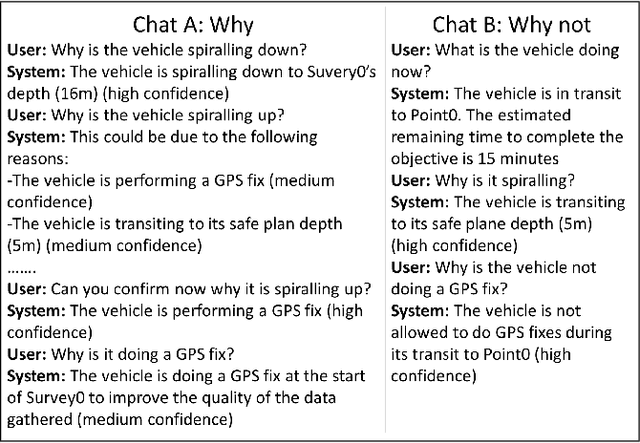
Autonomous systems in remote locations have a high degree of autonomy and there is a need to explain what they are doing and why in order to increase transparency and maintain trust. Here, we describe a natural language chat interface that enables vehicle behaviour to be queried by the user. We obtain an interpretable model of autonomy through having an expert 'speak out-loud' and provide explanations during a mission. This approach is agnostic to the type of autonomy model and as expert and operator are from the same user-group, we predict that these explanations will align well with the operator's mental model, increase transparency and assist with operator training.