 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIRIAM: A Multimodal Chat-Based Interface for Autonomous Systems
Mar 06, 2018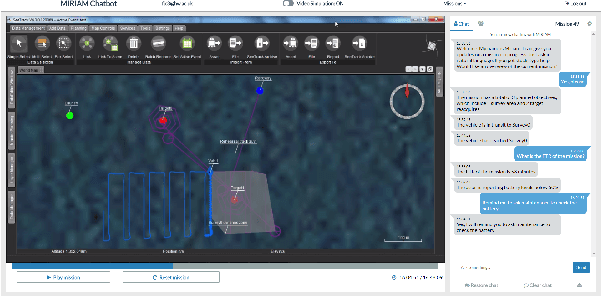
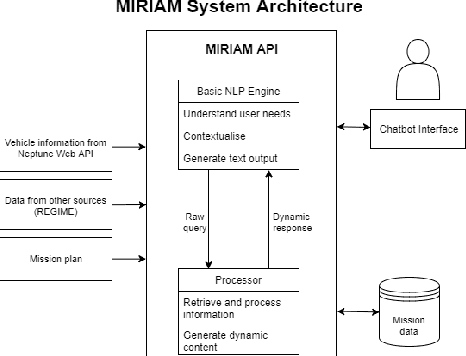
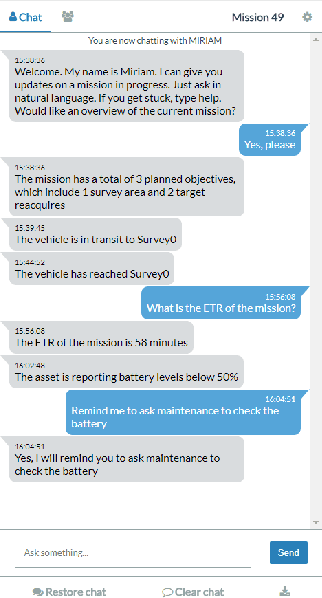
We present MIRIAM (Multimodal Intelligent inteRactIon for Autonomous systeMs), a multimodal interface to support situation awareness of autonomous vehicles through chat-based interaction. The user is able to chat about the vehicle's plan, objectives, previous activities and mission progress. The system is mixed initiative in that it pro-actively sends messages about key events, such as fault warnings. We will demonstrate MIRIAM using SeeByte's SeeTrack command and control interface and Neptune autonomy simulator.
Explain Yourself: A Natural Language Interface for Scrutable Autonomous Robots
Mar 06, 2018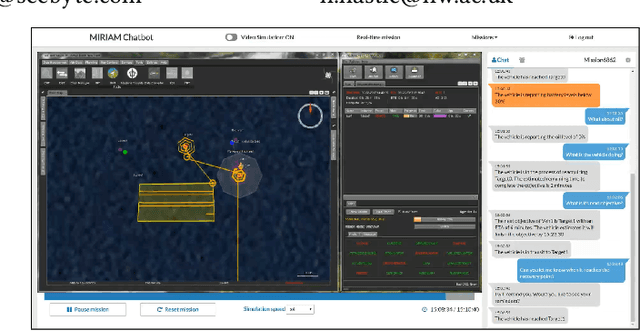
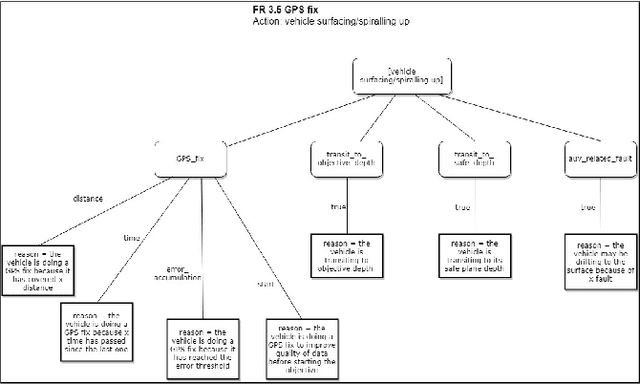
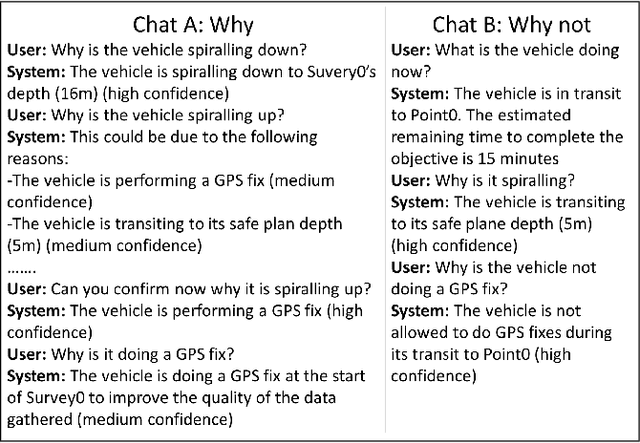
Autonomous systems in remote locations have a high degree of autonomy and there is a need to explain what they are doing and why in order to increase transparency and maintain trust. Here, we describe a natural language chat interface that enables vehicle behaviour to be queried by the user. We obtain an interpretable model of autonomy through having an expert 'speak out-loud' and provide explanations during a mission. This approach is agnostic to the type of autonomy model and as expert and operator are from the same user-group, we predict that these explanations will align well with the operator's mental model, increase transparency and assist with operator training.