 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Lab vs The Crowd: An Investigation into Data Quality for Neural Dialogue Models
Dec 07, 2020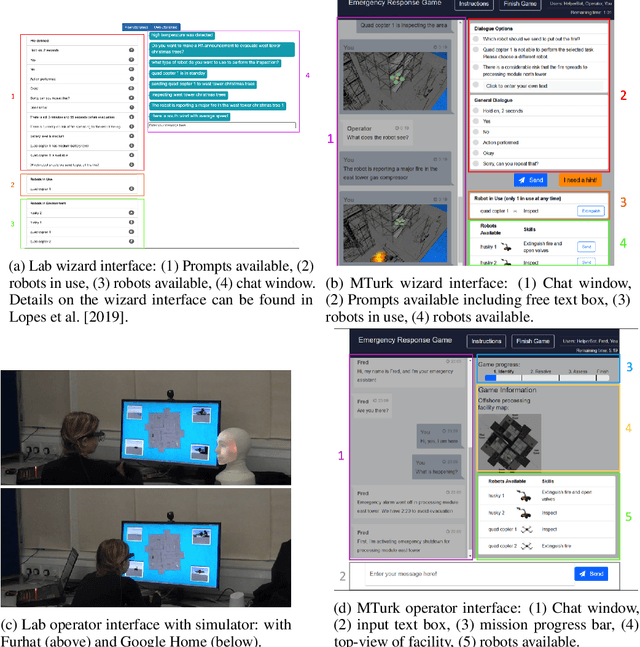
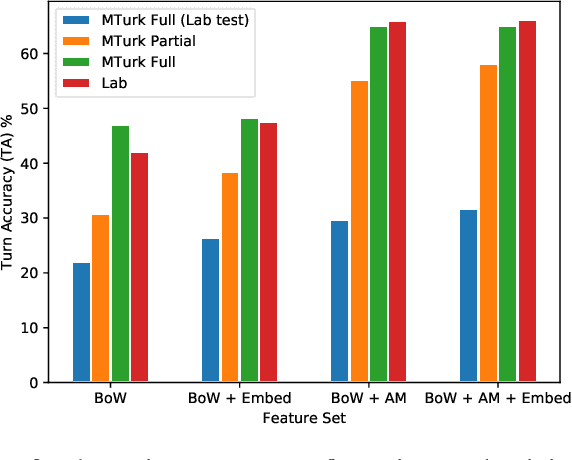
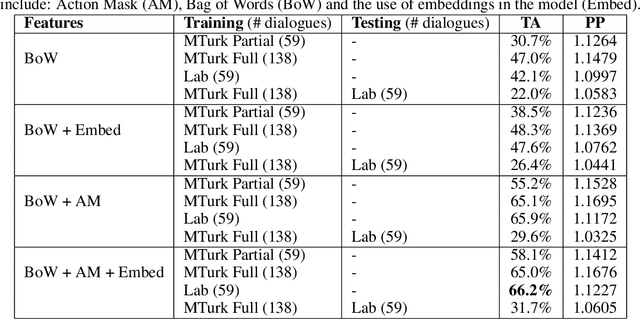

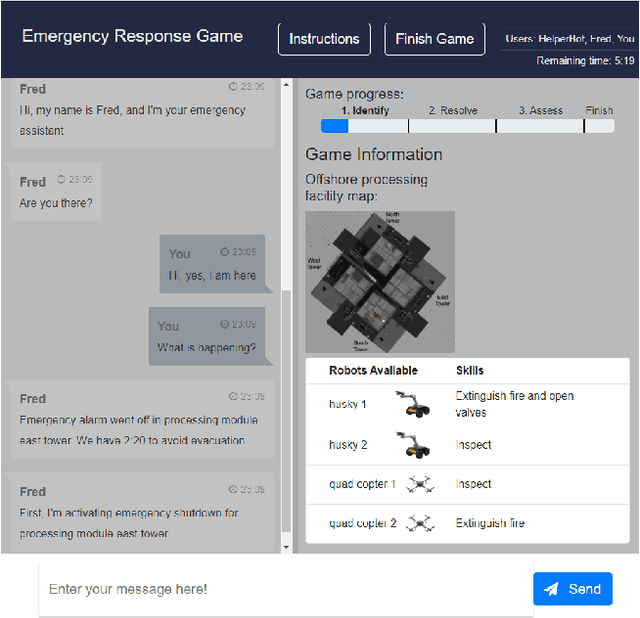
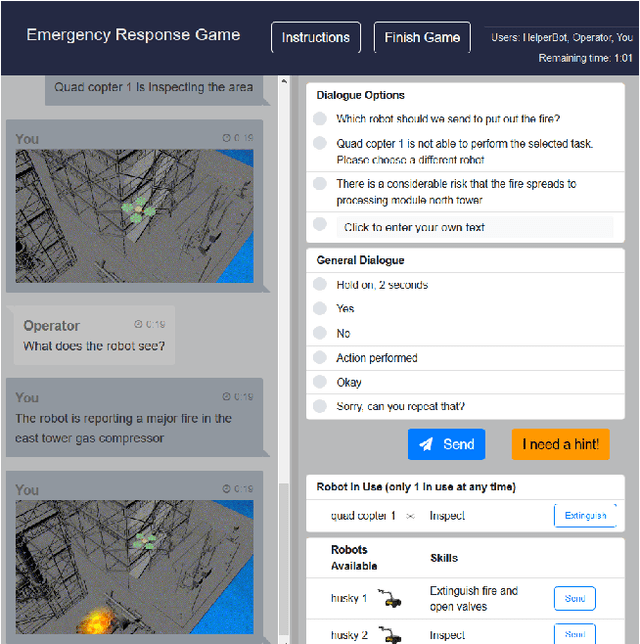
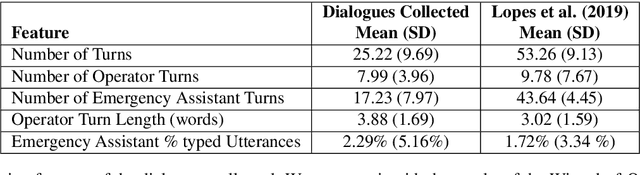
Challenges around collecting and processing quality data have hampered progress in data-driven dialogue models. Previous approaches are moving away from costly, resource-intensive lab settings, where collection is slow but where the data is deemed of high quality. The advent of crowd-sourcing platforms, such as Amazon Mechanical Turk, has provided researchers with an alternative cost-effective and rapid way to collect data. However, the collection of fluid, natural spoken or textual interaction can be challenging, particularly between two crowd-sourced workers. In this study, we compare the performance of dialogue models for the same interaction task but collected in two different settings: in the lab vs. crowd-sourced. We find that fewer lab dialogues are needed to reach similar accuracy, less than half the amount of lab data as crowd-sourced data. We discuss the advantages and disadvantages of each data collection method.
Robots in the Danger Zone: Exploring Public Perception through Engagement
Apr 01, 2020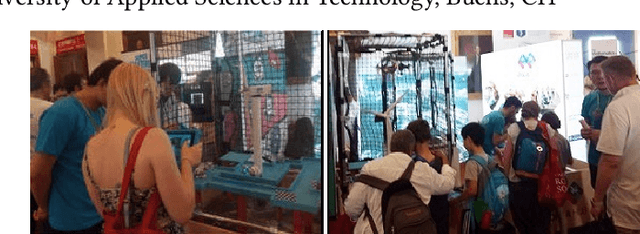
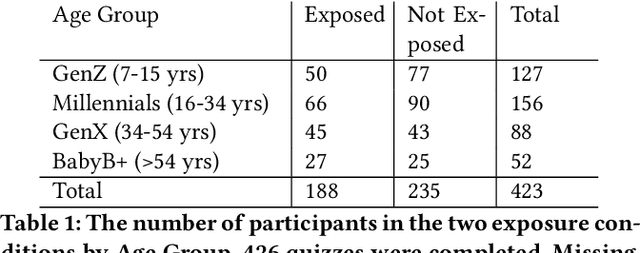
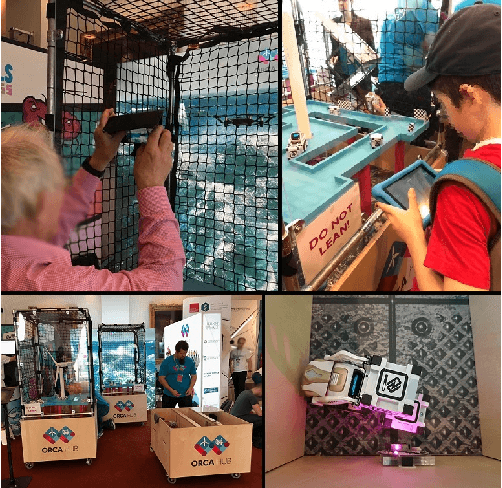
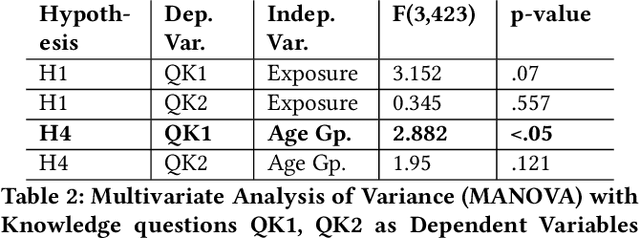
Public perceptions of Robotics and Artificial Intelligence (RAI) are important in the acceptance, uptake, government regulation and research funding of this technology. Recent research has shown that the public's understanding of RAI can be negative or inaccurate. We believe effective public engagement can help ensure that public opinion is better informed. In this paper, we describe our first iteration of a high throughput in-person public engagement activity. We describe the use of a light touch quiz-format survey instrument to integrate in-the-wild research participation into the engagement, allowing us to probe both the effectiveness of our engagement strategy, and public perceptions of the future roles of robots and humans working in dangerous settings, such as in the off-shore energy sector. We critique our methods and share interesting results into generational differences within the public's view of the future of Robotics and AI in hazardous environments. These findings include that older peoples' views about the future of robots in hazardous environments were not swayed by exposure to our exhibit, while the views of younger people were affected by our exhibit, leading us to consider carefully in future how to more effectively engage with and inform older people.
* Accepted in HRI 2020, Keywords: Human robot interaction, robotics, artificial intelligence, public engagement, public perceptions of robots, robotics and society
CRWIZ: A Framework for Crowdsourcing Real-Time Wizard-of-Oz Dialogues
Mar 12, 2020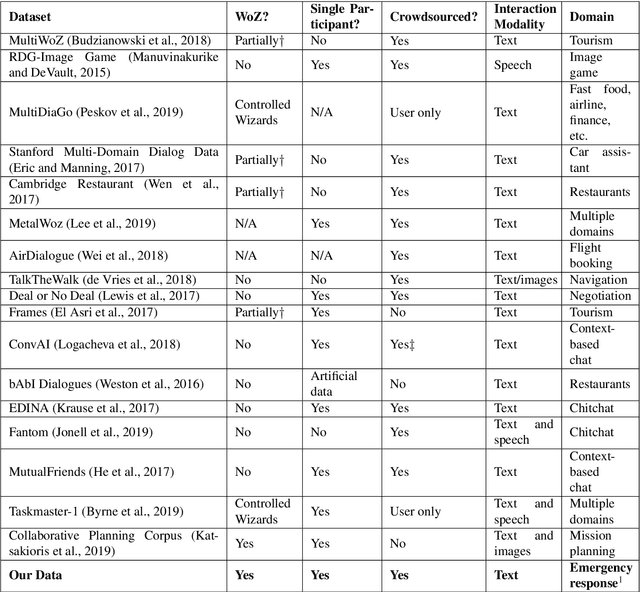
Large corpora of task-based and open-domain conversational dialogues are hugely valuable in the field of data-driven dialogue systems. Crowdsourcing platforms, such as Amazon Mechanical Turk, have been an effective method for collecting such large amounts of data. However, difficulties arise when task-based dialogues require expert domain knowledge or rapid access to domain-relevant information, such as databases for tourism. This will become even more prevalent as dialogue systems become increasingly ambitious, expanding into tasks with high levels of complexity that require collaboration and forward planning, such as in our domain of emergency response. In this paper, we propose CRWIZ: a framework for collecting real-time Wizard of Oz dialogues through crowdsourcing for collaborative, complex tasks. This framework uses semi-guided dialogue to avoid interactions that breach procedures and processes only known to experts, while enabling the capture of a wide variety of interactions. The framework is available at https://github.com/JChiyah/crwiz
Natural Language Interaction to Facilitate Mental Models of Remote Robots
Mar 12, 2020
Increasingly complex and autonomous robots are being deployed in real-world environments with far-reaching consequences. High-stakes scenarios, such as emergency response or offshore energy platform and nuclear inspections, require robot operators to have clear mental models of what the robots can and can't do. However, operators are often not the original designers of the robots and thus, they do not necessarily have such clear mental models, especially if they are novice users. This lack of mental model clarity can slow adoption and can negatively impact human-machine teaming. We propose that interaction with a conversational assistant, who acts as a mediator, can help the user with understanding the functionality of remote robots and increase transparency through natural language explanations, as well as facilitate the evaluation of operators' mental models.
MIRIAM: A Multimodal Chat-Based Interface for Autonomous Systems
Mar 06, 2018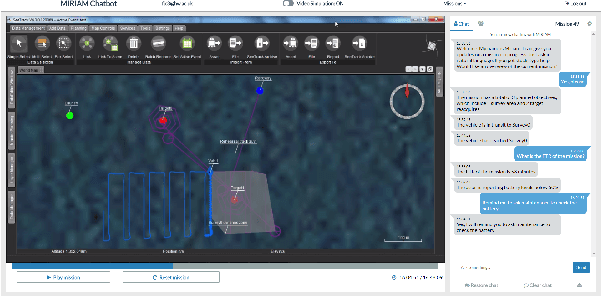
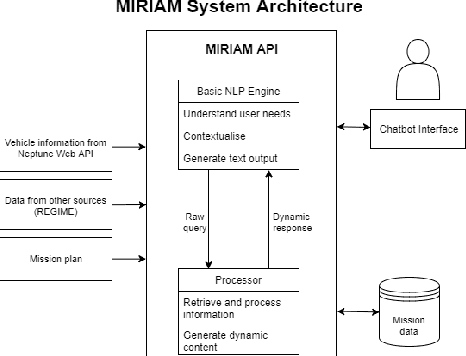
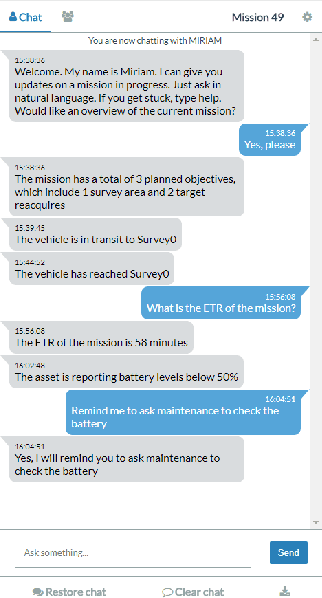
We present MIRIAM (Multimodal Intelligent inteRactIon for Autonomous systeMs), a multimodal interface to support situation awareness of autonomous vehicles through chat-based interaction. The user is able to chat about the vehicle's plan, objectives, previous activities and mission progress. The system is mixed initiative in that it pro-actively sends messages about key events, such as fault warnings. We will demonstrate MIRIAM using SeeByte's SeeTrack command and control interface and Neptune autonomy simulator.
Explain Yourself: A Natural Language Interface for Scrutable Autonomous Robots
Mar 06, 2018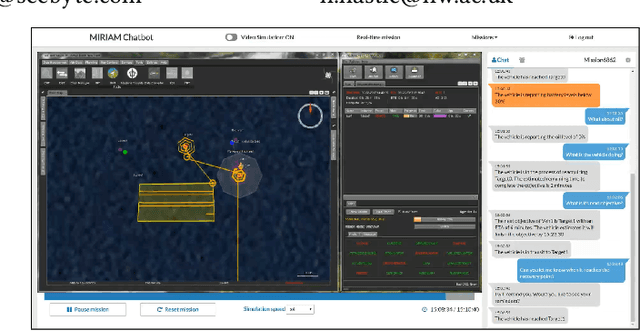
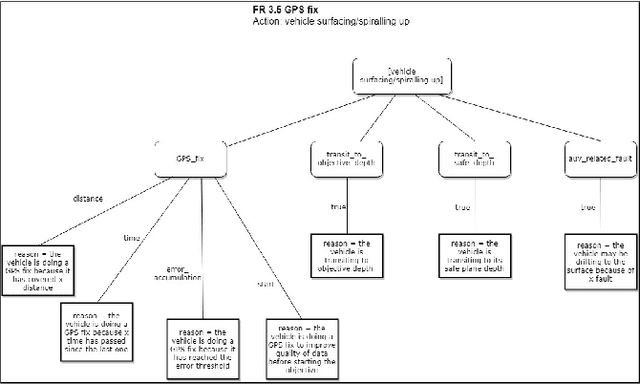
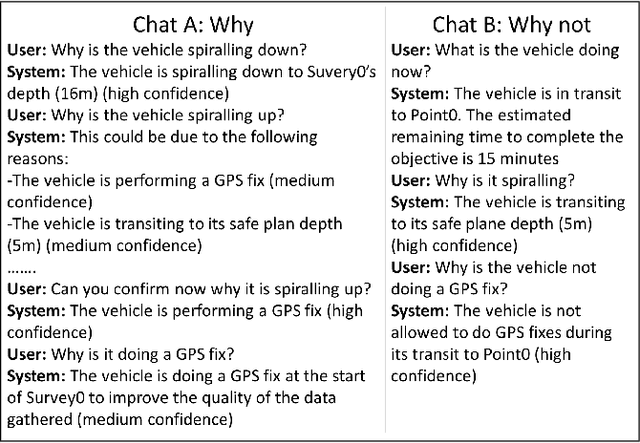
Autonomous systems in remote locations have a high degree of autonomy and there is a need to explain what they are doing and why in order to increase transparency and maintain trust. Here, we describe a natural language chat interface that enables vehicle behaviour to be queried by the user. We obtain an interpretable model of autonomy through having an expert 'speak out-loud' and provide explanations during a mission. This approach is agnostic to the type of autonomy model and as expert and operator are from the same user-group, we predict that these explanations will align well with the operator's mental model, increase transparency and assist with operator training.