Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIRIAM: A Multimodal Chat-Based Interface for Autonomous Systems
Paper and Code
Mar 06, 2018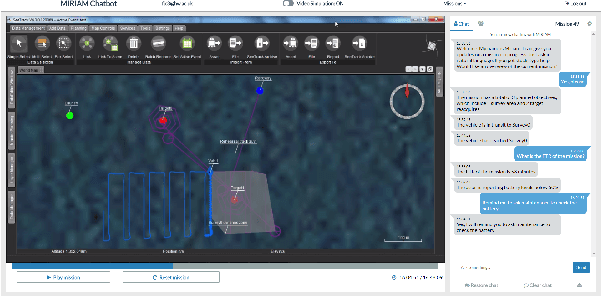
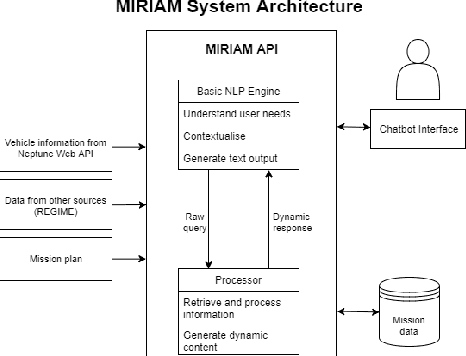
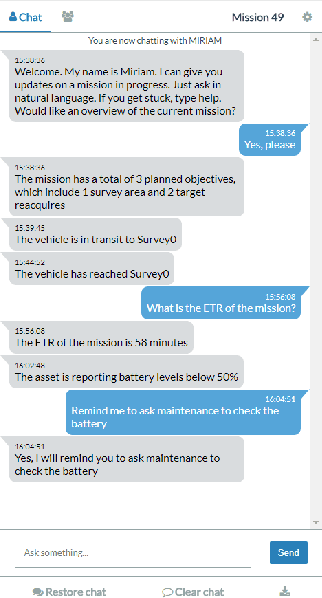
We present MIRIAM (Multimodal Intelligent inteRactIon for Autonomous systeMs), a multimodal interface to support situation awareness of autonomous vehicles through chat-based interaction. The user is able to chat about the vehicle's plan, objectives, previous activities and mission progress. The system is mixed initiative in that it pro-actively sends messages about key events, such as fault warnings. We will demonstrate MIRIAM using SeeByte's SeeTrack command and control interface and Neptune autonomy simulator.
* 2 pages, ICMI'17, 19th ACM International Conference on Multimodal
Interaction, November 13-17 2017, Glasgow, UK
View paper on