 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCRWIZ: A Framework for Crowdsourcing Real-Time Wizard-of-Oz Dialogues
Mar 12, 2020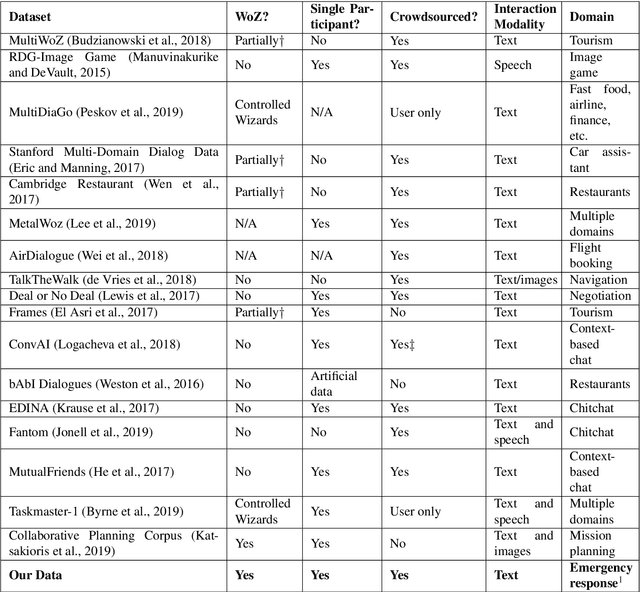
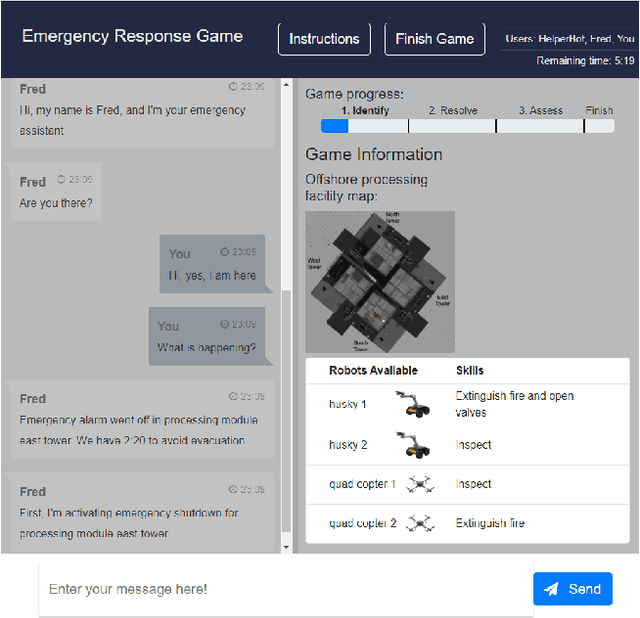
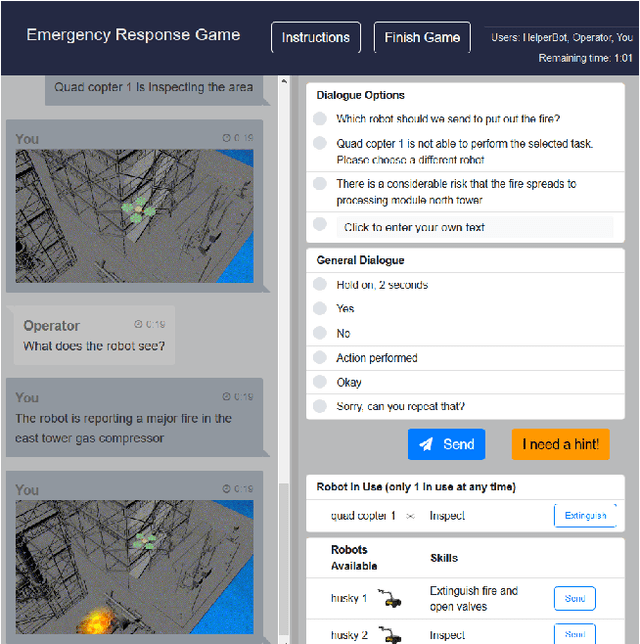
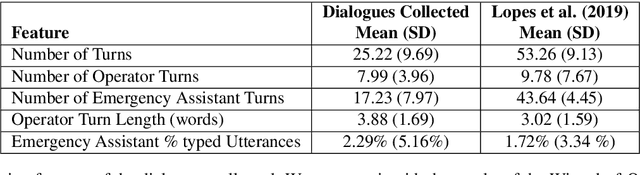
Large corpora of task-based and open-domain conversational dialogues are hugely valuable in the field of data-driven dialogue systems. Crowdsourcing platforms, such as Amazon Mechanical Turk, have been an effective method for collecting such large amounts of data. However, difficulties arise when task-based dialogues require expert domain knowledge or rapid access to domain-relevant information, such as databases for tourism. This will become even more prevalent as dialogue systems become increasingly ambitious, expanding into tasks with high levels of complexity that require collaboration and forward planning, such as in our domain of emergency response. In this paper, we propose CRWIZ: a framework for collecting real-time Wizard of Oz dialogues through crowdsourcing for collaborative, complex tasks. This framework uses semi-guided dialogue to avoid interactions that breach procedures and processes only known to experts, while enabling the capture of a wide variety of interactions. The framework is available at https://github.com/JChiyah/crwiz
User Evaluation of a Multi-dimensional Statistical Dialogue System
Sep 06, 2019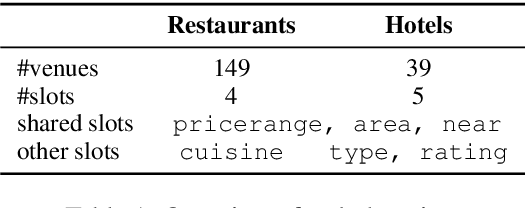
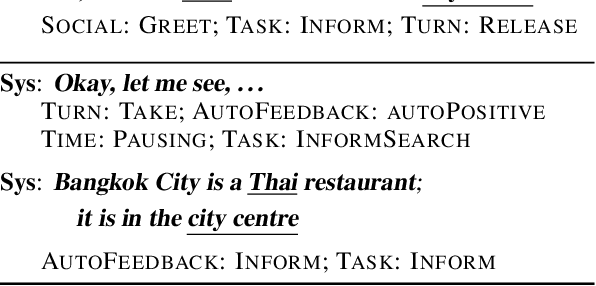
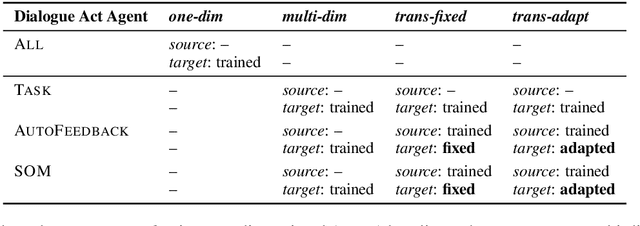
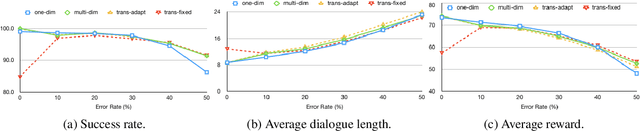
We present the first complete spoken dialogue system driven by a multi-dimensional statistical dialogue manager. This framework has been shown to substantially reduce data needs by leveraging domain-independent dimensions, such as social obligations or feedback, which (as we show) can be transferred between domains. In this paper, we conduct a user study and show that the performance of a multi-dimensional system, which can be adapted from a source domain, is equivalent to that of a one-dimensional baseline, which can only be trained from scratch.
Challenges in Collaborative HRI for Remote Robot Teams
May 17, 2019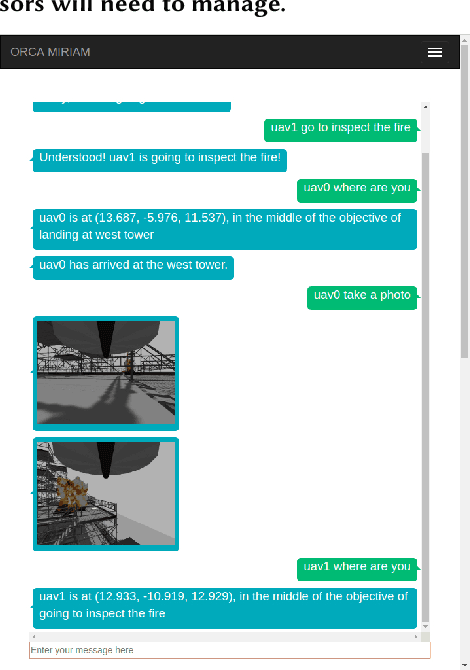

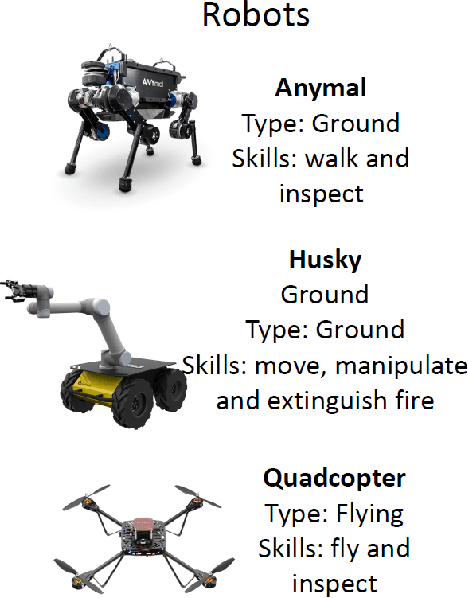
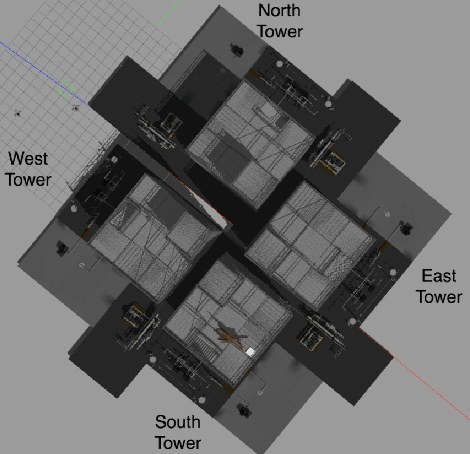
Collaboration between human supervisors and remote teams of robots is highly challenging, particularly in high-stakes, distant, hazardous locations, such as off-shore energy platforms. In order for these teams of robots to truly be beneficial, they need to be trusted to operate autonomously, performing tasks such as inspection and emergency response, thus reducing the number of personnel placed in harm's way. As remote robots are generally trusted less than robots in close-proximity, we present a solution to instil trust in the operator through a `mediator robot' that can exhibit social skills, alongside sophisticated visualisation techniques. In this position paper, we present general challenges and then take a closer look at one challenge in particular, discussing an initial study, which investigates the relationship between the level of control the supervisor hands over to the mediator robot and how this affects their trust. We show that the supervisor is more likely to have higher trust overall if their initial experience involves handing over control of the emergency situation to the robotic assistant. We discuss this result, here, as well as other challenges and interaction techniques for human-robot collaboration.
Benchmarking Natural Language Understanding Services for building Conversational Agents
Mar 26, 2019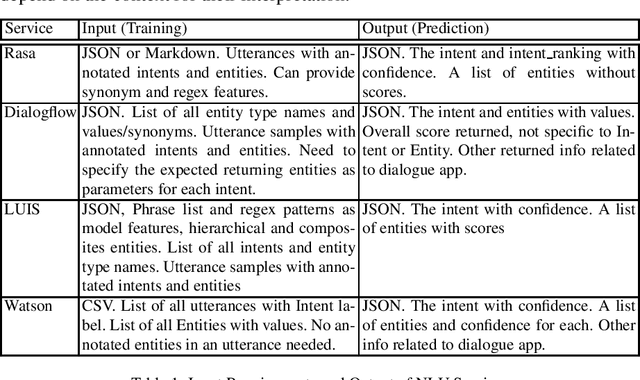



We have recently seen the emergence of several publicly available Natural Language Understanding (NLU) toolkits, which map user utterances to structured, but more abstract, Dialogue Act (DA) or Intent specifications, while making this process accessible to the lay developer. In this paper, we present the first wide coverage evaluation and comparison of some of the most popular NLU services, on a large, multi-domain (21 domains) dataset of 25K user utterances that we have collected and annotated with Intent and Entity Type specifications and which will be released as part of this submission. The results show that on Intent classification Watson significantly outperforms the other platforms, namely, Dialogflow, LUIS and Rasa; though these also perform well. Interestingly, on Entity Type recognition, Watson performs significantly worse due to its low Precision. Again, Dialogflow, LUIS and Rasa perform well on this task.
Explain Yourself: A Natural Language Interface for Scrutable Autonomous Robots
Mar 06, 2018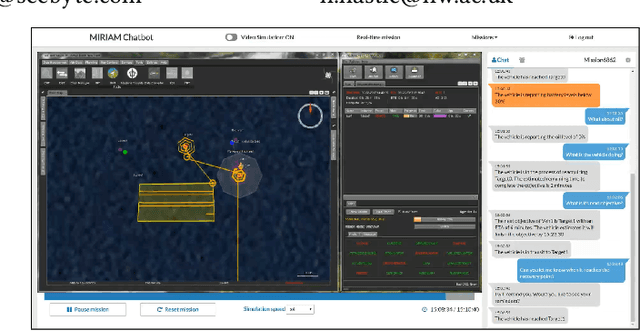
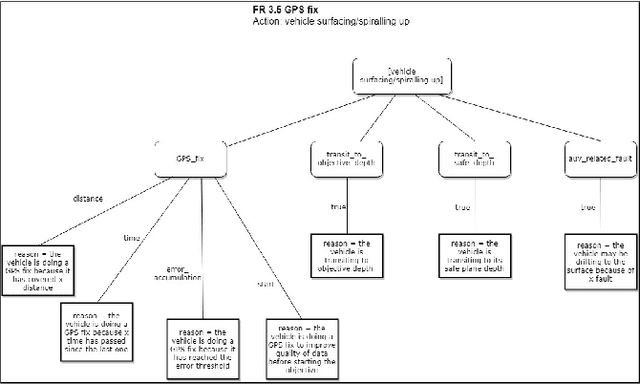
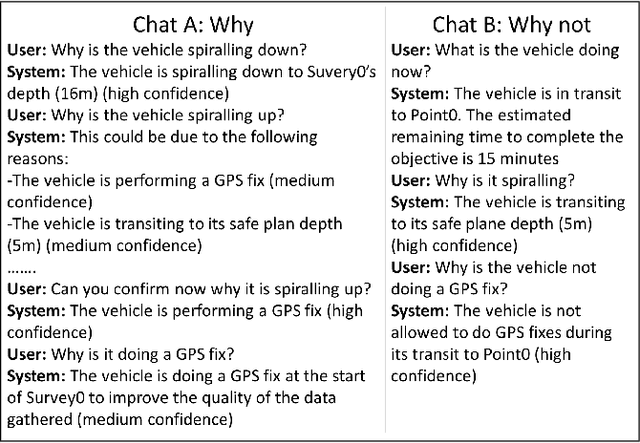
Autonomous systems in remote locations have a high degree of autonomy and there is a need to explain what they are doing and why in order to increase transparency and maintain trust. Here, we describe a natural language chat interface that enables vehicle behaviour to be queried by the user. We obtain an interpretable model of autonomy through having an expert 'speak out-loud' and provide explanations during a mission. This approach is agnostic to the type of autonomy model and as expert and operator are from the same user-group, we predict that these explanations will align well with the operator's mental model, increase transparency and assist with operator training.