 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a compact low loss 2-way millimetre wave power divider for future communication
Apr 07, 2025In this paper, a rectangular-shaped power divider has been presented operating at 27.9 GHz. The power divider has achieved acceptable results for important parameters such as S11, S12, S21, and S22. The substrate employed for the power divider is Roger 3003 which has a thickness of 1.6 mm. This power divider provides a reflection coefficient of -12.2 dB and an insertion loss of 3.1 dB at 28 GHz. This ka-band T-junction power divider covers 68% of the bandwidth. Dimensions of the ka-band T-junction power divider are 50x80 mm. Due to its dimensions and bandwidth this power divider is more suitable for millimetre wave applications like RADAR, beamforming, and 5G applications.
Challenges in Collaborative HRI for Remote Robot Teams
May 17, 2019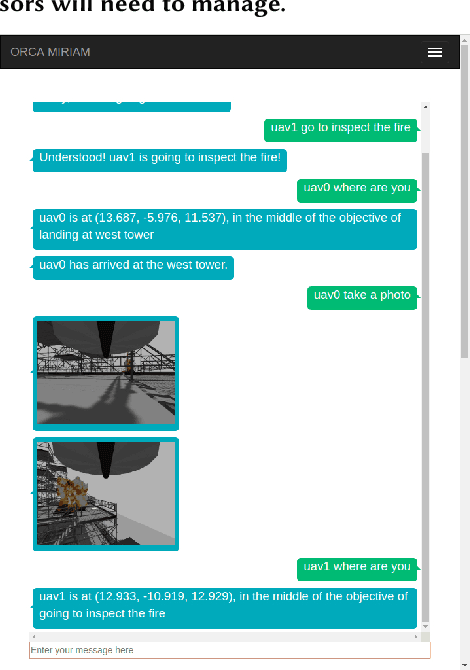

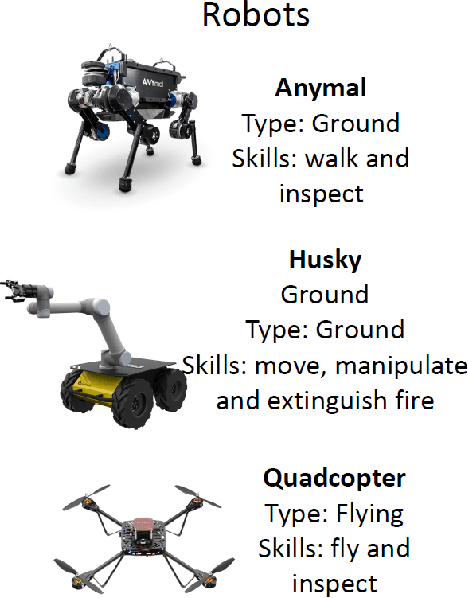
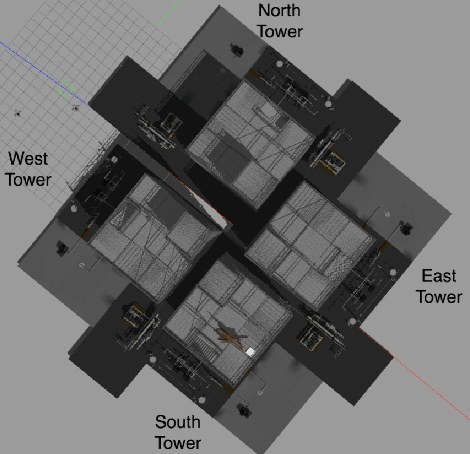
Collaboration between human supervisors and remote teams of robots is highly challenging, particularly in high-stakes, distant, hazardous locations, such as off-shore energy platforms. In order for these teams of robots to truly be beneficial, they need to be trusted to operate autonomously, performing tasks such as inspection and emergency response, thus reducing the number of personnel placed in harm's way. As remote robots are generally trusted less than robots in close-proximity, we present a solution to instil trust in the operator through a `mediator robot' that can exhibit social skills, alongside sophisticated visualisation techniques. In this position paper, we present general challenges and then take a closer look at one challenge in particular, discussing an initial study, which investigates the relationship between the level of control the supervisor hands over to the mediator robot and how this affects their trust. We show that the supervisor is more likely to have higher trust overall if their initial experience involves handing over control of the emergency situation to the robotic assistant. We discuss this result, here, as well as other challenges and interaction techniques for human-robot collaboration.