 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Exploration of Stopword Probabilities in Topic Models
Jan 17, 2025



Stopword removal is a critical stage in many Machine Learning methods but often receives little consideration, it interferes with the model visualizations and disrupts user confidence. Inappropriately chosen or hastily omitted stopwords not only lead to suboptimal performance but also significantly affect the quality of models, thus reducing the willingness of practitioners and stakeholders to rely on the output visualizations. This paper proposes a novel extraction method that provides a corpus-specific probabilistic estimation of stopword likelihood and an interactive visualization system to support their analysis. We evaluated our approach and interface using real-world data, a commonly used Machine Learning method (Topic Modelling), and a comprehensive qualitative experiment probing user confidence. The results of our work show that our system increases user confidence in the credibility of topic models by (1) returning reasonable probabilities, (2) generating an appropriate and representative extension of common stopword lists, and (3) providing an adjustable threshold for estimating and analyzing stopwords visually. Finally, we discuss insights, recommendations, and best practices to support practitioners while improving the output of Machine Learning methods and topic model visualizations with robust stopword analysis and removal.
Enhancing Reading Strategies by Exploring A Theme-based Approach to Literature Surveys
Feb 10, 2021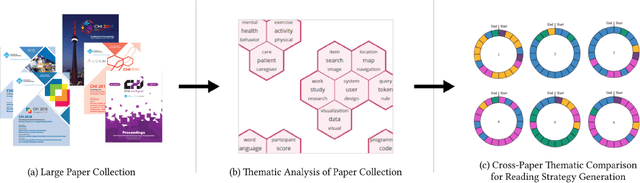
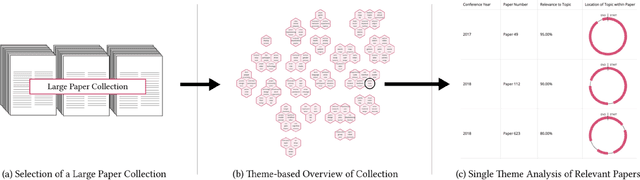
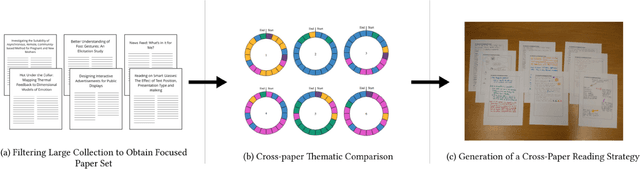
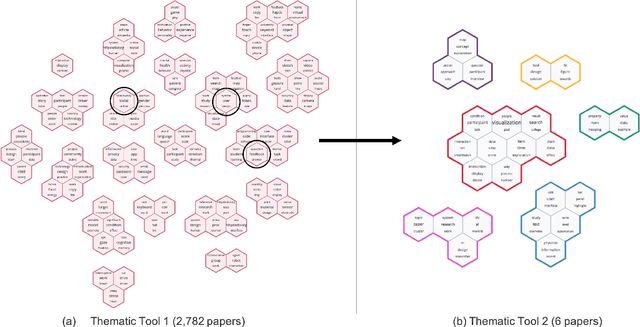
Searching large digital repositories can be extremely frustrating, as common list-based formats encourage users to adopt a convenience-sampling approach that favours chance discovery and random search, over meaningful exploration. We have designed a methodology that allows users to visually and thematically explore corpora, while developing personalised holistic reading strategies. We describe the results of a three-phase qualitative study, in which experienced researchers used our interactive visualisation approach to analyse a set of publications and select relevant themes and papers. Using in-depth semi-structured interviews and stimulated recall, we found that users: (i) selected papers that they otherwise would not have read, (ii) developed a more coherent reading strategy, and (iii) understood the thematic structure and relationships between papers more effectively. Finally, we make six design recommendations to enhance current digital repositories that we have shown encourage users to adopt a more holistic and thematic research approach.
Challenges in Collaborative HRI for Remote Robot Teams
May 17, 2019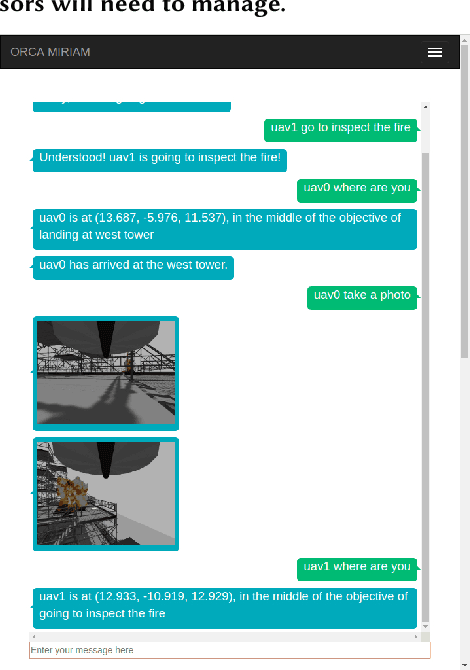

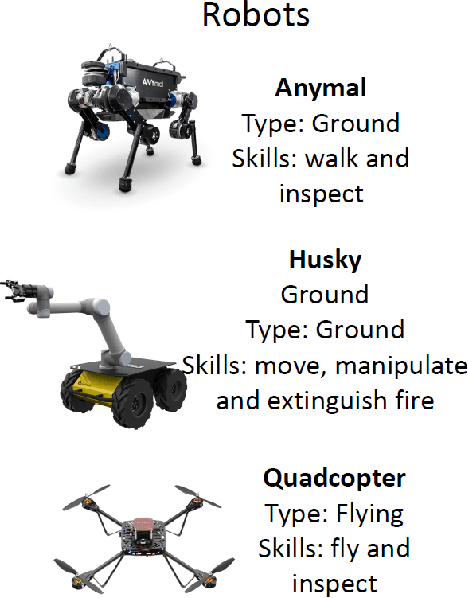
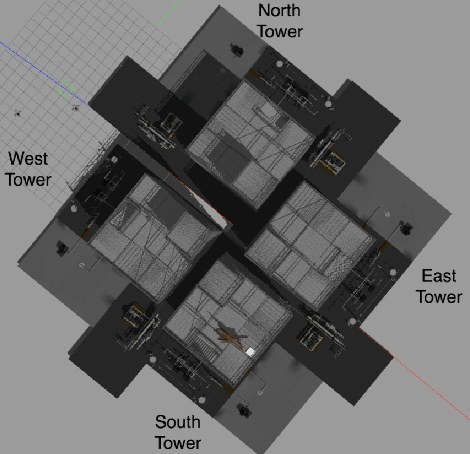
Collaboration between human supervisors and remote teams of robots is highly challenging, particularly in high-stakes, distant, hazardous locations, such as off-shore energy platforms. In order for these teams of robots to truly be beneficial, they need to be trusted to operate autonomously, performing tasks such as inspection and emergency response, thus reducing the number of personnel placed in harm's way. As remote robots are generally trusted less than robots in close-proximity, we present a solution to instil trust in the operator through a `mediator robot' that can exhibit social skills, alongside sophisticated visualisation techniques. In this position paper, we present general challenges and then take a closer look at one challenge in particular, discussing an initial study, which investigates the relationship between the level of control the supervisor hands over to the mediator robot and how this affects their trust. We show that the supervisor is more likely to have higher trust overall if their initial experience involves handing over control of the emergency situation to the robotic assistant. We discuss this result, here, as well as other challenges and interaction techniques for human-robot collaboration.