 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree Approaches to the Automation of Laser System Alignment and Their Resource Implications: A Case Study
Sep 17, 2024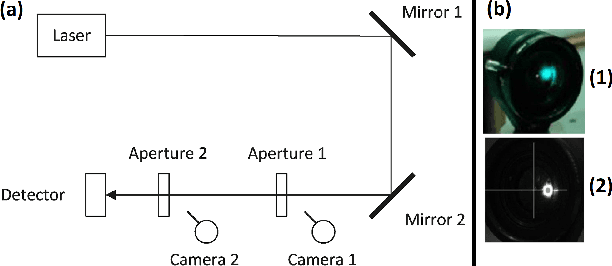
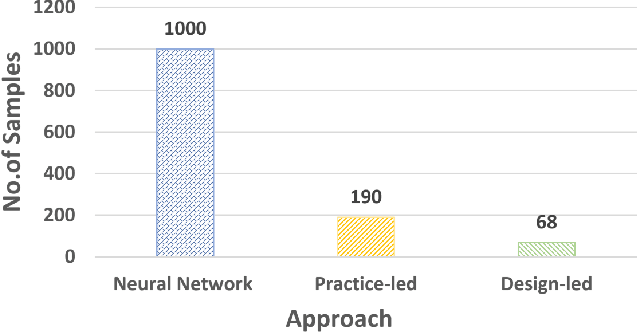
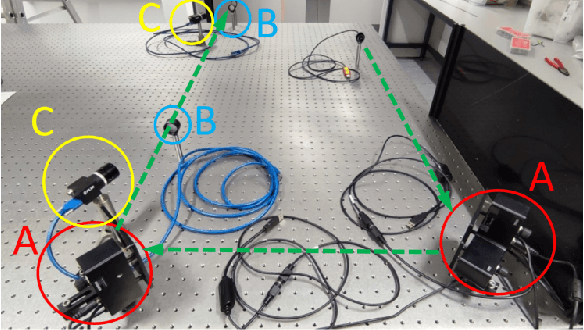
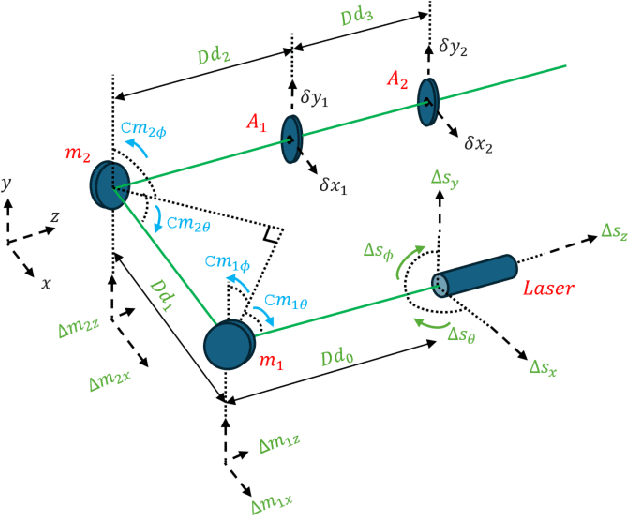
The alignment of optical systems is a critical step in their manufacture. Alignment normally requires considerable knowledge and expertise of skilled operators. The automation of such processes has several potential advantages, but requires additional resource and upfront costs. Through a case study of a simple two mirror system we identify and examine three different automation approaches. They are: artificial neural networks; practice-led, which mimics manual alignment practices; and design-led, modelling from first principles. We find that these approaches make use of three different types of knowledge 1) basic system knowledge (of controls, measurements and goals); 2) behavioural skills and expertise, and 3) fundamental system design knowledge. We demonstrate that the different automation approaches vary significantly in human resources, and measurement sampling budgets. This will have implications for practitioners and management considering the automation of such tasks.
Kinematics, workspace and singularity analysis of a multi-mode parallel robot
Aug 07, 2017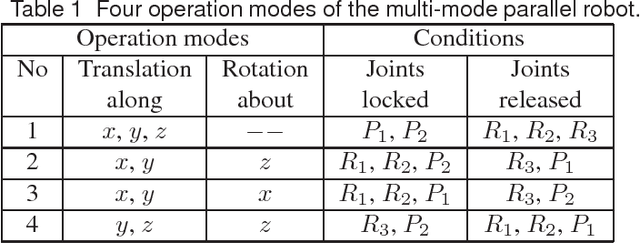
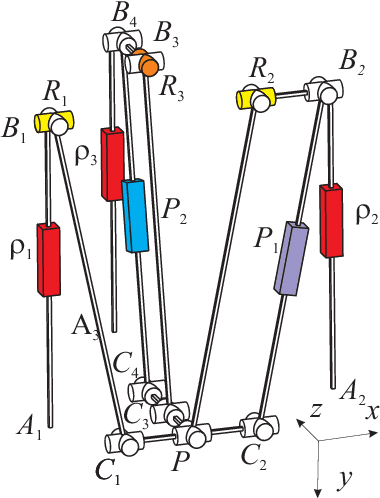
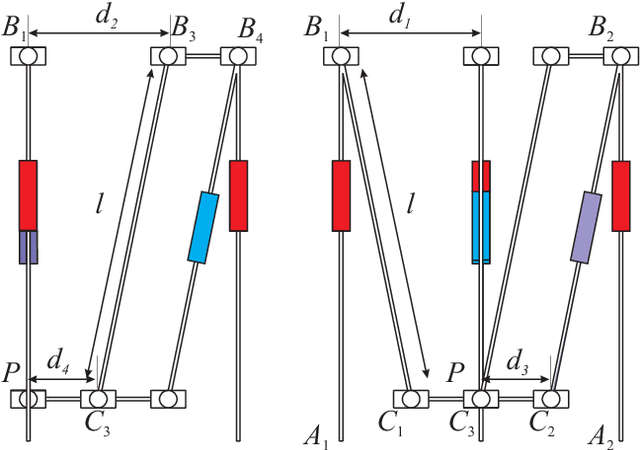
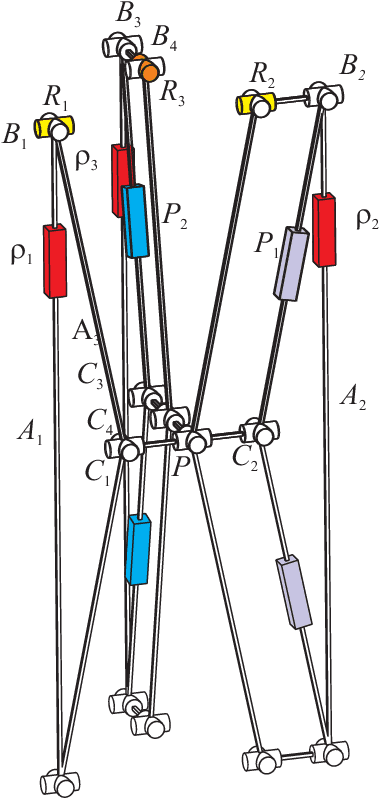
A family of reconfigurable parallel robots can change motion modes by passing through constraint singularities by locking and releasing some passive joints of the robot. This paper is about the kinematics, the workspace and singularity analysis of a 3-PRPiR parallel robot involving lockable Pi and R (revolute) joints. Here a Pi joint may act as a 1-DOF planar parallelogram if its lock-able P (prismatic) joint is locked or a 2-DOF RR serial chain if its lockable P joint is released. The operation modes of the robot include a 3T operation modes to three 2T1R operation modes with two different directions of the rotation axis of the moving platform. The inverse kinematics and forward kinematics of the robot in each operation modes are dealt with in detail. The workspace analysis of the robot allow us to know the regions of the workspace that the robot can reach in each operation mode. A prototype built at Heriot-Watt University is used to illustrate the results of this work.