 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaulty Coffees: Barriers to Adoption of an In-the-wild Robo-Barista
Mar 17, 2026We set out to study whether task-based narratives could influence long-term engagement with a service robot. To do so, we deployed a Robo-Barista for five weeks in an over-50's housing complex in Stockton, England. Residents received a free daily coffee by interacting with a Furhat robot assigned to either a narrative or non-narrative dialogue condition. Despite designing for sustained engagement, repeat interaction was low, and we encountered curiosity trials without retention, technical breakdowns, accessibility barriers, and the social dynamics of a housing complex setting. Rather than treating these as peripheral issues, we foreground them in this paper. We reflect on the in-the-wild realities of our experiment and offer lessons for conducting longitudinal Human-Robot Interaction research when studies unravel in practice.
FurNav: Development and Preliminary Study of a Robot Direction Giver
Sep 25, 2023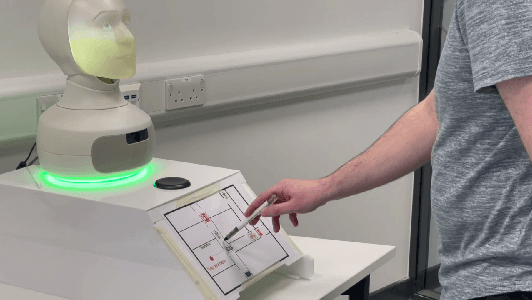
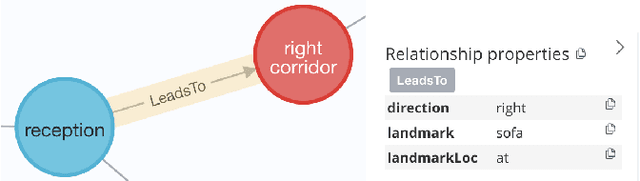
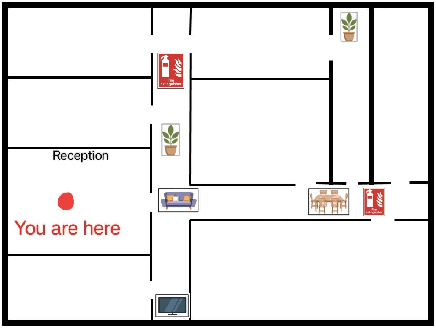
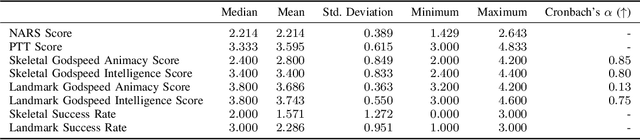
When giving directions to a lost-looking tourist, would you first reference the street-names, cardinal directions, landmarks, or simply tell them to walk five hundred metres in one direction then turn left? Depending on the circumstances, one could reasonably make use of any of these direction giving styles. However, research on direction giving with a robot does not often look at how these different direction styles impact perceptions of the robots intelligence, nor does it take into account how users prior dispositions may impact ratings. In this work, we look at generating natural language for two navigation styles using a created system for a Furhat robot, before measuring perceived intelligence and animacy alongside users prior dispositions to robots in a small preliminary study (N=7). Our results confirm findings by previous work that prior negative attitudes towards robots correlates negatively with propensity to trust robots, and also suggests avenues for future research. For example, more data is needed to explore the link between perceived intelligence and direction style. We end by discussing our plan to run a larger scale experiment, and how to improve our existing study design.
Feeding the Coffee Habit: A Longitudinal Study of a Robo-Barista
Sep 06, 2023Studying Human-Robot Interaction over time can provide insights into what really happens when a robot becomes part of people's everyday lives. "In the Wild" studies inform the design of social robots, such as for the service industry, to enable them to remain engaging and useful beyond the novelty effect and initial adoption. This paper presents an "In the Wild" experiment where we explored the evolution of interaction between users and a Robo-Barista. We show that perceived trust and prior attitudes are both important factors associated with the usefulness, adaptability and likeability of the Robo-Barista. A combination of interaction features and user attributes are used to predict user satisfaction. Qualitative insights illuminated users' Robo-Barista experience and contribute to a number of lessons learned for future long-term studies.
We are all Individuals: The Role of Robot Personality and Human Traits in Trustworthy Interaction
Jul 28, 2023
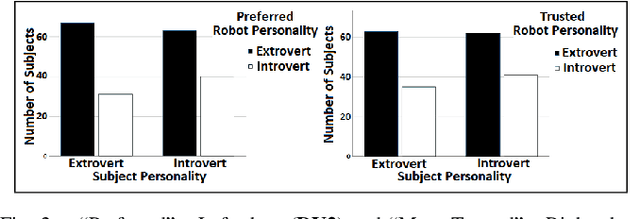
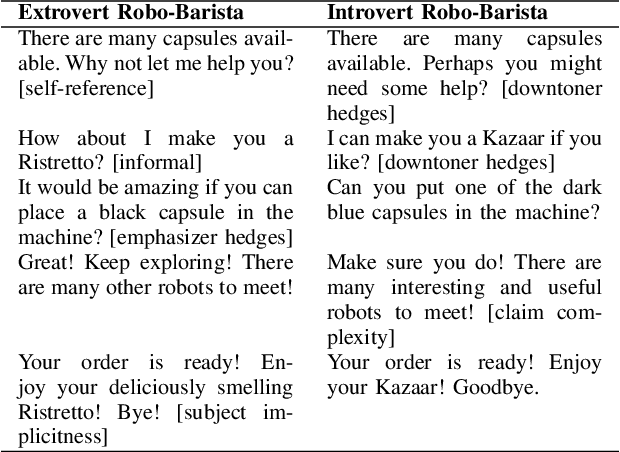
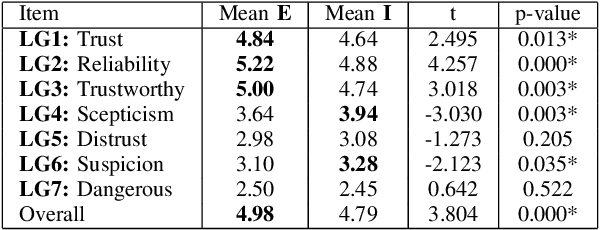
As robots take on roles in our society, it is important that their appearance, behaviour and personality are appropriate for the job they are given and are perceived favourably by the people with whom they interact. Here, we provide an extensive quantitative and qualitative study exploring robot personality but, importantly, with respect to individual human traits. Firstly, we show that we can accurately portray personality in a social robot, in terms of extroversion-introversion using vocal cues and linguistic features. Secondly, through garnering preferences and trust ratings for these different robot personalities, we establish that, for a Robo-Barista, an extrovert robot is preferred and trusted more than an introvert robot, regardless of the subject's own personality. Thirdly, we find that individual attitudes and predispositions towards robots do impact trust in the Robo-Baristas, and are therefore important considerations in addition to robot personality, roles and interaction context when designing any human-robot interaction study.
* 8 pages, RO-MAN'22, 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), August 2022, Naples, Italy