 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWe are all Individuals: The Role of Robot Personality and Human Traits in Trustworthy Interaction
Jul 28, 2023
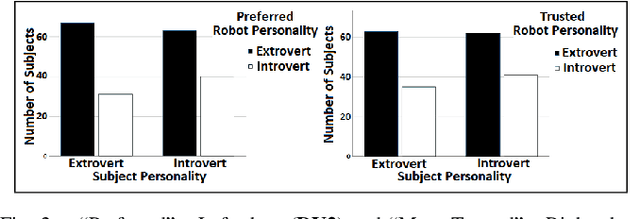
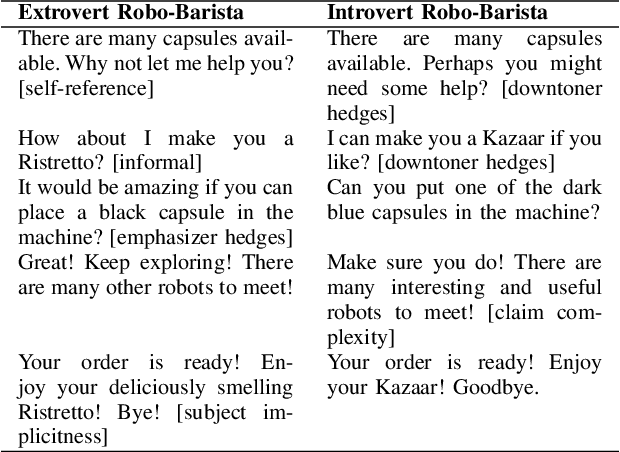
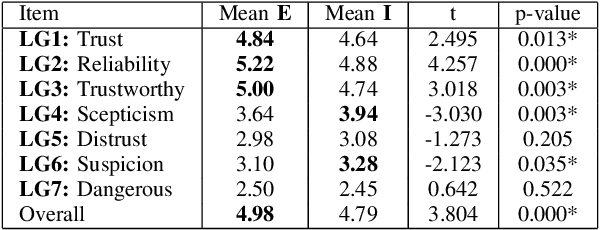
As robots take on roles in our society, it is important that their appearance, behaviour and personality are appropriate for the job they are given and are perceived favourably by the people with whom they interact. Here, we provide an extensive quantitative and qualitative study exploring robot personality but, importantly, with respect to individual human traits. Firstly, we show that we can accurately portray personality in a social robot, in terms of extroversion-introversion using vocal cues and linguistic features. Secondly, through garnering preferences and trust ratings for these different robot personalities, we establish that, for a Robo-Barista, an extrovert robot is preferred and trusted more than an introvert robot, regardless of the subject's own personality. Thirdly, we find that individual attitudes and predispositions towards robots do impact trust in the Robo-Baristas, and are therefore important considerations in addition to robot personality, roles and interaction context when designing any human-robot interaction study.
* 8 pages, RO-MAN'22, 31st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), August 2022, Naples, Italy
RADIATE: A Radar Dataset for Automotive Perception
Oct 18, 2020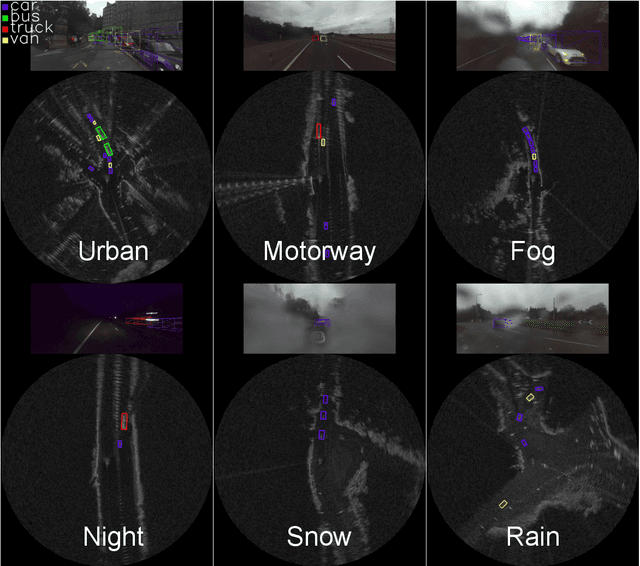
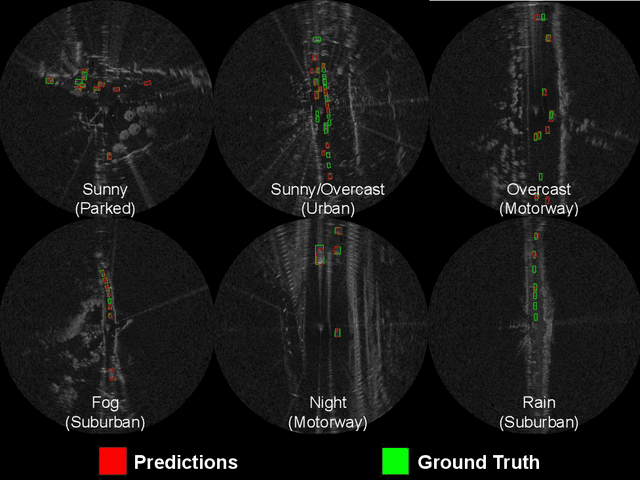
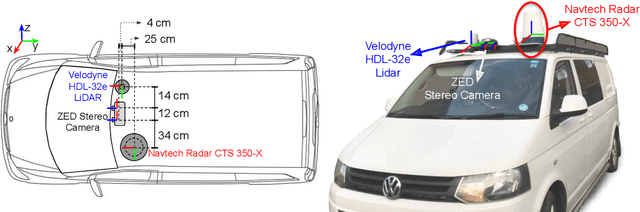
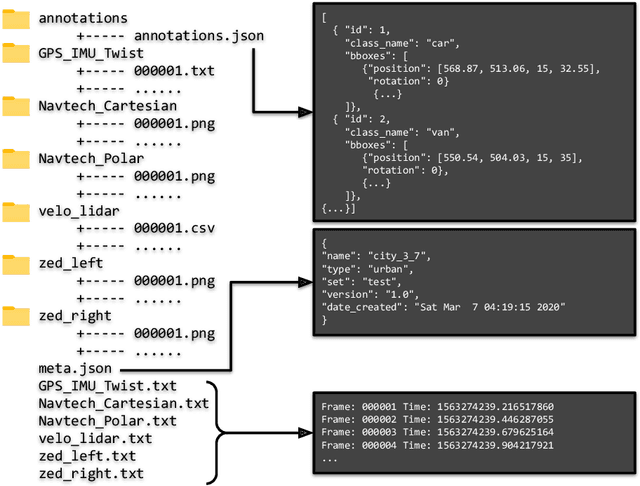
Datasets for autonomous cars are essential for the development and benchmarking of perception systems. However, most existing datasets are captured with camera and LiDAR sensors in good weather conditions. In this paper, we present the RAdar Dataset In Adverse weaThEr (RADIATE), aiming to facilitate research on object detection, tracking and scene understanding using radar sensing for safe autonomous driving. RADIATE includes 3 hours of annotated radar images with more than 200K labelled road actors in total, on average about 4.6 instances per radar image. It covers 8 different categories of actors in a variety of weather conditions (e.g., sun, night, rain, fog and snow) and driving scenarios (e.g., parked, urban, motorway and suburban), representing different levels of challenge. To the best of our knowledge, this is the first public radar dataset which provides high-resolution radar images on public roads with a large amount of road actors labelled. The data collected in adverse weather, e.g., fog and snowfall, is unique. Some baseline results of radar based object detection and recognition are given to show that the use of radar data is promising for automotive applications in bad weather, where vision and LiDAR can fail. RADIATE also has stereo images, 32-channel LiDAR and GPS data, directed at other applications such as sensor fusion, localisation and mapping. The public dataset can be accessed at http://pro.hw.ac.uk/radiate/.