 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lightweight Traffic Map for Efficient Anytime LaCAM*
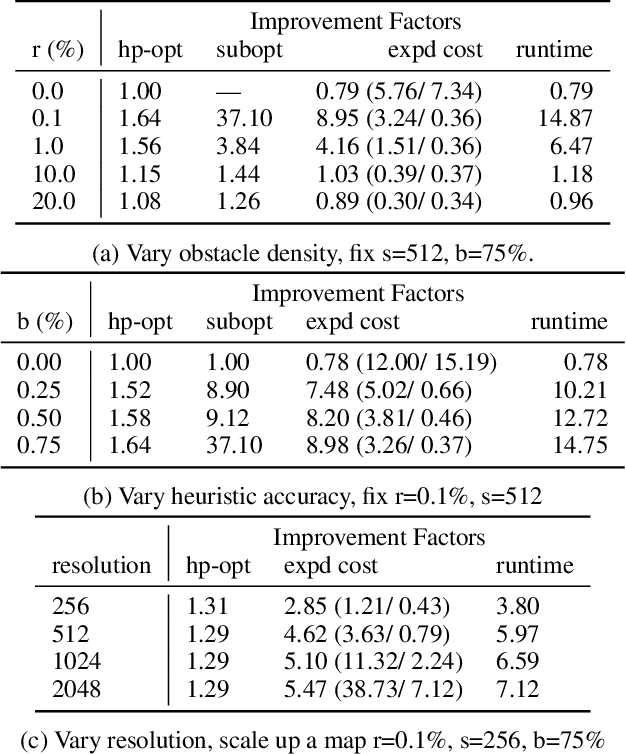
Mar 09, 2026Multi-Agent Path Finding (MAPF) aims to compute collision-free paths for multiple agents and has a wide range of practical applications. LaCAM*, an anytime configuration-based solver, currently represents the state of the art. Recent work has explored the use of guidance paths to steer LaCAM* toward configurations that avoid traffic congestion, thereby improving solution quality. However, existing approaches rely on Frank-Wolfe-style optimization that repeatedly invokes single-agent search before executing LaCAM*, resulting in substantial computational overhead for large-scale problems. Moreover, the guidance path is static and primarily beneficial for finding the first solution in LaCAM*. To address these limitations, we propose a new approach that leverages LaCAM*'s ability to construct a dynamic, lightweight traffic map during its search. Experimental results demonstrate that our method achieves higher solution quality than state-of-the-art guidance-path approaches across two MAPF variants.
Online Submission and Evaluation System Design for Competition Operations
Jul 23, 2025Research communities have developed benchmark datasets across domains to compare the performance of algorithms and techniques However, tracking the progress in these research areas is not easy, as publications appear in different venues at the same time, and many of them claim to represent the state-of-the-art. To address this, research communities often organise periodic competitions to evaluate the performance of various algorithms and techniques, thereby tracking advancements in the field. However, these competitions pose a significant operational burden. The organisers must manage and evaluate a large volume of submissions. Furthermore, participants typically develop their solutions in diverse environments, leading to compatibility issues during the evaluation of their submissions. This paper presents an online competition system that automates the submission and evaluation process for a competition. The competition system allows organisers to manage large numbers of submissions efficiently, utilising isolated environments to evaluate submissions. This system has already been used successfully for several competitions, including the Grid-Based Pathfinding Competition and the League of Robot Runners competition.
Dynamic Replanning for Improved Public Transport Routing
May 20, 2025
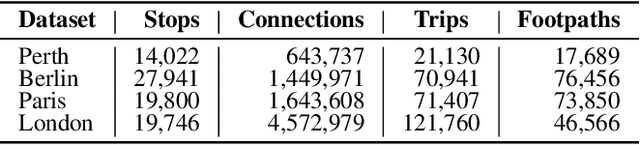


Delays in public transport are common, often impacting users through prolonged travel times and missed transfers. Existing solutions for handling delays remain limited; backup plans based on historical data miss opportunities for earlier arrivals, while snapshot planning accounts for current delays but not future ones. With the growing availability of live delay data, users can adjust their journeys in real-time. However, the literature lacks a framework that fully exploits this advantage for system-scale dynamic replanning. To address this, we formalise the dynamic replanning problem in public transport routing and propose two solutions: a "pull" approach, where users manually request replanning, and a novel "push" approach, where the server proactively monitors and adjusts journeys. Our experiments show that the push approach outperforms the pull approach, achieving significant speedups. The results also reveal substantial arrival time savings enabled by dynamic replanning.
Anytime Single-Step MAPF Planning with Anytime PIBT
Apr 10, 2025PIBT is a popular Multi-Agent Path Finding (MAPF) method at the core of many state-of-the-art MAPF methods including LaCAM, CS-PIBT, and WPPL. The main utility of PIBT is that it is a very fast and effective single-step MAPF solver and can return a collision-free single-step solution for hundreds of agents in less than a millisecond. However, the main drawback of PIBT is that it is extremely greedy in respect to its priorities and thus leads to poor solution quality. Additionally, PIBT cannot use all the planning time that might be available to it and returns the first solution it finds. We thus develop Anytime PIBT, which quickly finds a one-step solution identically to PIBT but then continuously improves the solution in an anytime manner. We prove that Anytime PIBT converges to the optimal solution given sufficient time. We experimentally validate that Anytime PIBT can rapidly improve single-step solution quality within milliseconds and even find the optimal single-step action. However, we interestingly find that improving the single-step solution quality does not have a significant effect on full-horizon solution costs.
Real-Time LaCAM
Apr 08, 2025The vast majority of Multi-Agent Path Finding (MAPF) methods with completeness guarantees require planning full horizon paths. However, planning full horizon paths can take too long and be impractical in real-world applications. Instead, real-time planning and execution, which only allows the planner a finite amount of time before executing and replanning, is more practical for real world multi-agent systems. Several methods utilize real-time planning schemes but none are provably complete, which leads to livelock or deadlock. Our main contribution is to show the first Real-Time MAPF method with provable completeness guarantees. We do this by leveraging LaCAM (Okumura 2023) in an incremental fashion. Our results show how we can iteratively plan for congested environments with a cutoff time of milliseconds while still maintaining the same success rate as full horizon LaCAM. We also show how it can be used with a single-step learned MAPF policy. The proposed Real-Time LaCAM also provides us with a general mechanism for using iterative constraints for completeness in future real-time MAPF algorithms.
Parallelizing Multi-objective A* Search
Mar 13, 2025The Multi-objective Shortest Path (MOSP) problem is a classic network optimization problem that aims to find all Pareto-optimal paths between two points in a graph with multiple edge costs. Recent studies on multi-objective search with A* (MOA*) have demonstrated superior performance in solving difficult MOSP instances. This paper presents a novel search framework that allows efficient parallelization of MOA* with different objective orders. The framework incorporates a unique upper bounding strategy that helps the search reduce the problem's dimensionality to one in certain cases. Experimental results demonstrate that the proposed framework can enhance the performance of recent A*-based solutions, with the speed-up proportional to the problem dimension.
Real-Time Energy-Optimal Path Planning for Electric Vehicles
Nov 20, 2024The rapid adoption of electric vehicles (EVs) in modern transport systems has made energy-aware routing a critical task in their successful integration, especially within large-scale networks. In cases where an EV's remaining energy is limited and charging locations are not easily accessible, some destinations may only be reachable through an energy-optimal path: a route that consumes less energy than all other alternatives. The feasibility of such energy-efficient paths depends heavily on the accuracy of the energy model used for planning, and thus failing to account for vehicle dynamics can lead to inaccurate energy estimates, rendering some planned routes infeasible in reality. This paper explores the impact of vehicle dynamics on energy-optimal path planning for EVs. We develop an accurate energy model that incorporates key vehicle dynamics parameters into energy calculations, thereby reducing the risk of planning infeasible paths under battery constraints. The paper also introduces two novel online reweighting functions that allow for a faster, pre-processing free, pathfinding in the presence of negative energy costs resulting from regenerative braking, making them ideal for real-time applications. Through extensive experimentation on real-world transport networks, we demonstrate that our approach considerably enhances energy-optimal pathfinding for EVs in both computational efficiency and energy estimation accuracy.
Traffic Flow Optimisation for Lifelong Multi-Agent Path Finding
Aug 23, 2023Multi-Agent Path Finding (MAPF) is a fundamental problem in robotics that asks us to compute collision-free paths for a team of agents, all moving across a shared map. Although many works appear on this topic, all current algorithms struggle as the number of agents grows. The principal reason is that existing approaches typically plan free-flow optimal paths, which creates congestion. To tackle this issue we propose a new approach for MAPF where agents are guided to their destination by following congestion-avoiding paths. We evaluate the idea in two large-scale settings: one-shot MAPF, where each agent has a single destination, and lifelong MAPF, where agents are continuously assigned new tasks. For one-shot MAPF we show that our approach substantially improves solution quality. For Lifelong MAPF we report large improvements in overall throughput.
Reducing Redundant Work in Jump Point Search
Jun 28, 2023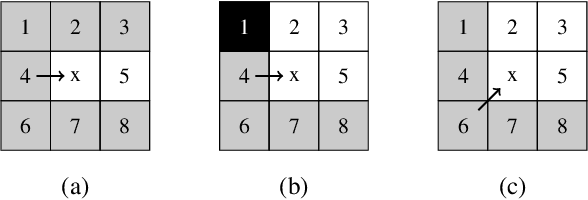
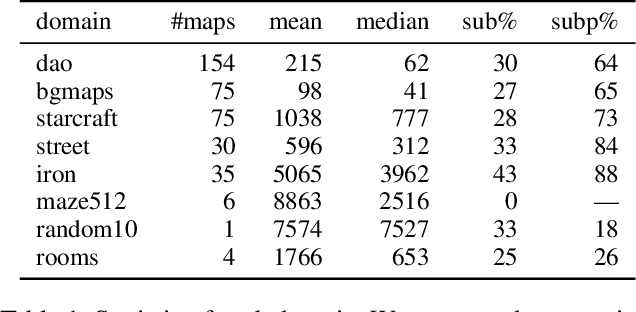
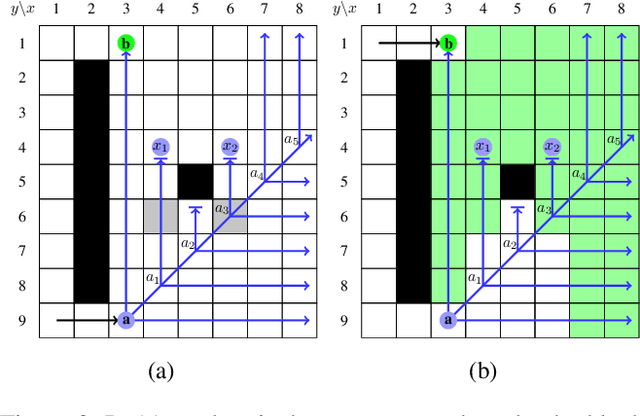
JPS (Jump Point Search) is a state-of-the-art optimal algorithm for online grid-based pathfinding. Widely used in games and other navigation scenarios, JPS nevertheless can exhibit pathological behaviours which are not well studied: (i) it may repeatedly scan the same area of the map to find successors; (ii) it may generate and expand suboptimal search nodes. In this work, we examine the source of these pathological behaviours, show how they can occur in practice, and propose a purely online approach, called Constrained JPS (CJPS), to tackle them efficiently. Experimental results show that CJPS has low overheads and is often faster than JPS in dynamically changing grid environments: by up to 7x in large game maps and up to 14x in pathological scenarios.
Scalable Rail Planning and Replanning with Soft Deadlines
Jun 10, 2023The Flatland Challenge, which was first held in 2019 and reported in NeurIPS 2020, is designed to answer the question: How to efficiently manage dense traffic on complex rail networks? Considering the significance of punctuality in real-world railway network operation and the fact that fast passenger trains share the network with slow freight trains, Flatland version 3 introduces trains with different speeds and scheduling time windows. This paper introduces the Flatland 3 problem definitions and extends an award-winning MAPF-based software, which won the NeurIPS 2020 competition, to efficiently solve Flatland 3 problems. The resulting system won the Flatland 3 competition. We designed a new priority ordering for initial planning, a new neighbourhood selection strategy for efficient solution quality improvement with Multi-Agent Path Finding via Large Neighborhood Search(MAPF-LNS), and use MAPF-LNS for partially replanning the trains influenced by malfunction.