 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOL-Trees: Efficient Hierarchical Object Search in Road Networks
Jan 28, 2026Location-based services rely heavily on efficient methods that search for relevant points-of-interest (POIs) near a given location. A k Nearest Neighbor (kNN) query is one such example that finds the k closest POIs from an agent's location. While most existing techniques focus on retrieving nearby POIs for a single agent, these search heuristics do not translate to many other applications. For example, Aggregate k Nearest Neighbor (AkNN) queries require POIs that are close to multiple agents. k Farthest Neighbor (kFN) queries require POIs that are the antithesis of nearest. Such problems naturally benefit from a hierarchical approach, but existing methods rely on Euclidean-based heuristics, which have diminished effectiveness in graphs such as road networks. We propose a novel data structure, COL-Tree (Compacted Object-Landmark Tree), to address this gap by enabling efficient hierarchical graph traversal using a more accurate landmark-based heuristic. We then present query algorithms that utilize COL-Trees to efficiently answer AkNN, kFN, and other queries. In our experiments on real-world and synthetic datasets, we demonstrate that our techniques significantly outperform existing approaches, achieving up to 4 orders of magnitude improvement. Moreover, this comes at a small pre-processing overhead in both theory and practice.
MapEval: A Map-Based Evaluation of Geo-Spatial Reasoning in Foundation Models
Dec 31, 2024



Recent advancements in foundation models have enhanced AI systems' capabilities in autonomous tool usage and reasoning. However, their ability in location or map-based reasoning - which improves daily life by optimizing navigation, facilitating resource discovery, and streamlining logistics - has not been systematically studied. To bridge this gap, we introduce MapEval, a benchmark designed to assess diverse and complex map-based user queries with geo-spatial reasoning. MapEval features three task types (textual, API-based, and visual) that require collecting world information via map tools, processing heterogeneous geo-spatial contexts (e.g., named entities, travel distances, user reviews or ratings, images), and compositional reasoning, which all state-of-the-art foundation models find challenging. Comprising 700 unique multiple-choice questions about locations across 180 cities and 54 countries, MapEval evaluates foundation models' ability to handle spatial relationships, map infographics, travel planning, and navigation challenges. Using MapEval, we conducted a comprehensive evaluation of 28 prominent foundation models. While no single model excelled across all tasks, Claude-3.5-Sonnet, GPT-4o, and Gemini-1.5-Pro achieved competitive performance overall. However, substantial performance gaps emerged, particularly in MapEval, where agents with Claude-3.5-Sonnet outperformed GPT-4o and Gemini-1.5-Pro by 16% and 21%, respectively, and the gaps became even more amplified when compared to open-source LLMs. Our detailed analyses provide insights into the strengths and weaknesses of current models, though all models still fall short of human performance by more than 20% on average, struggling with complex map images and rigorous geo-spatial reasoning. This gap highlights MapEval's critical role in advancing general-purpose foundation models with stronger geo-spatial understanding.
EHL*: Memory-Budgeted Indexing for Ultrafast Optimal Euclidean Pathfinding
Aug 21, 2024The Euclidean Shortest Path Problem (ESPP), which involves finding the shortest path in a Euclidean plane with polygonal obstacles, is a classic problem with numerous real-world applications. The current state-of-the-art solution, Euclidean Hub Labeling (EHL), offers ultra-fast query performance, outperforming existing techniques by 1-2 orders of magnitude in runtime efficiency. However, this performance comes at the cost of significant memory overhead, requiring up to tens of gigabytes of storage on large maps, which can limit its applicability in memory-constrained environments like mobile phones or smaller devices. Additionally, EHL's memory usage can only be determined after index construction, and while it provides a memory-runtime tradeoff, it does not fully optimize memory utilization. In this work, we introduce an improved version of EHL, called EHL*, which overcomes these limitations. A key contribution of EHL* is its ability to create an index that adheres to a specified memory budget while optimizing query runtime performance. Moreover, EHL* can leverage preknown query distributions, a common scenario in many real-world applications to further enhance runtime efficiency. Our results show that EHL* can reduce memory usage by up to 10-20 times without much impact on query runtime performance compared to EHL, making it a highly effective solution for optimal pathfinding in memory-constrained environments.
Tracking Progress in Multi-Agent Path Finding
May 15, 2023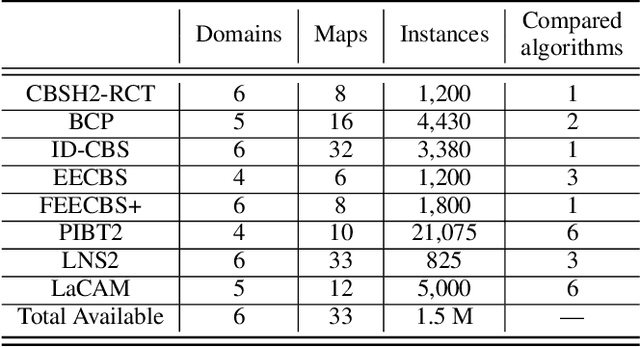
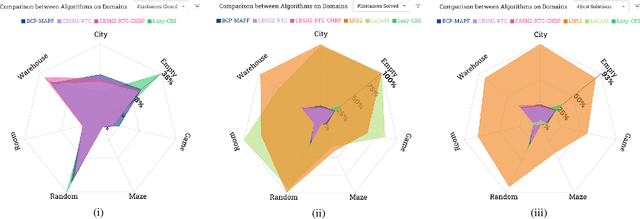
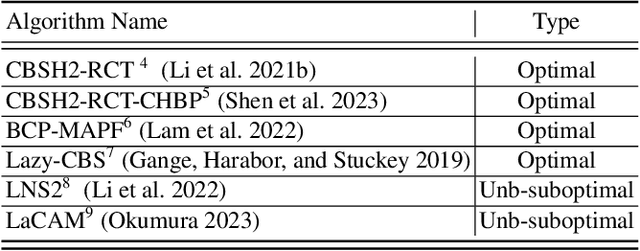
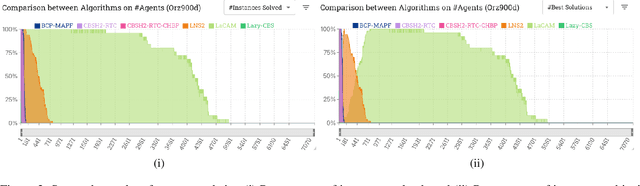
Multi-Agent Path Finding (MAPF) is an important core problem for many new and emerging industrial applications. Many works appear on this topic each year, and a large number of substantial advancements and performance improvements have been reported. Yet measuring overall progress in MAPF is difficult: there are many potential competitors, and the computational burden for comprehensive experimentation is prohibitively large. Moreover, detailed data from past experimentation is usually unavailable. In this work, we introduce a set of methodological and visualisation tools which can help the community establish clear indicators for state-of-the-art MAPF performance and which can facilitate large-scale comparisons between MAPF solvers. Our objectives are to lower the barrier of entry for new researchers and to further promote the study of MAPF, since progress in the area and the main challenges are made much clearer.
Multi-Target Search in Euclidean Space with Ray Shooting
Jul 06, 2022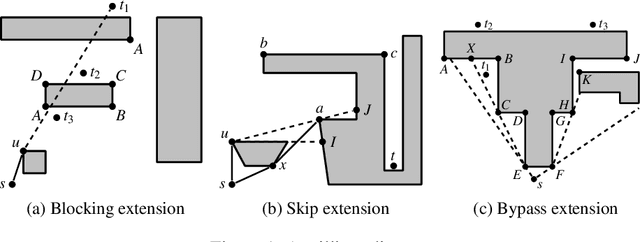
The Euclidean shortest path problem (ESPP) is a well studied problem with many practical applications. Recently a new efficient online approach to this problem, RayScan, has been developed, based on ray shooting and polygon scanning. In this paper we show how we can improve RayScan by carefully reasoning about polygon scans. We also look into how RayScan could be applied in the single-source multi-target scenario, where logic during scanning is used to reduce the number of rays shots required. This improvement also helps in the single target case. We compare the improved RayScan+ against the state-of-the-art ESPP algorithm, illustrating the situations where it is better.
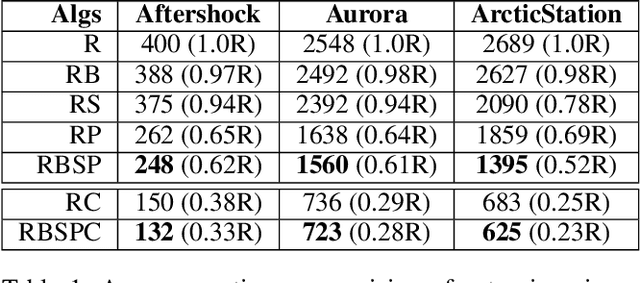
Unsupervised Space Partitioning for Nearest Neighbor Search
Jun 16, 2022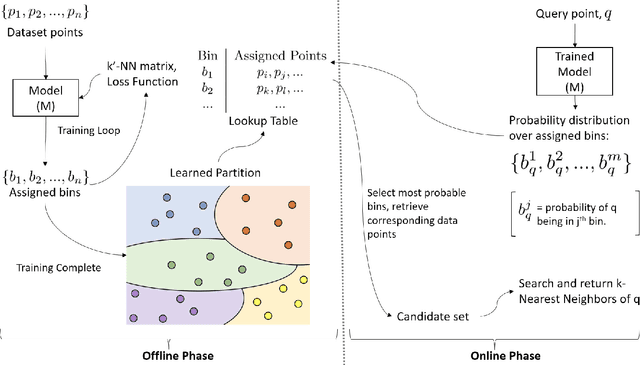
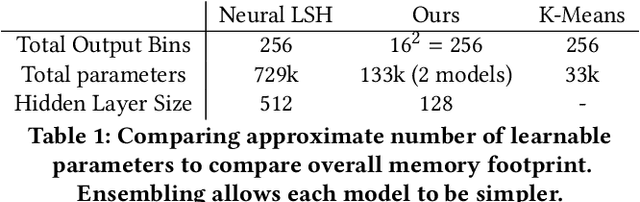
Approximate Nearest Neighbor Search (ANNS) in high dimensional spaces is crucial for many real-life applications (e.g., e-commerce, web, multimedia, etc.) dealing with an abundance of data. In this paper, we propose an end-to-end learning framework that couples the partitioning (one key step of ANNS) and learning-to-search steps using a custom loss function. A key advantage of our proposed solution is that it does not require any expensive pre-processing of the dataset, which is one of the key limitations of the state-of-the-art approach. We achieve the above edge by formulating a multi-objective custom loss function that does not need ground truth labels to quantify the quality of a given partition of the data space, making it entirely unsupervised. We also propose an ensembling technique by adding varying input weights to the loss function to train an ensemble of models to enhance the search quality. On several standard benchmarks for ANNS, we show that our method beats the state-of-the-art space partitioning method and the ubiquitous K-means clustering method while using fewer parameters and shorter offline training times. Without loss of generality, our unsupervised partitioning approach is shown as a promising alternative to many widely used clustering methods like K-means clustering and DBSCAN.
DeepAltTrip: Top-k Alternative Itineraries for Trip Recommendation
Sep 08, 2021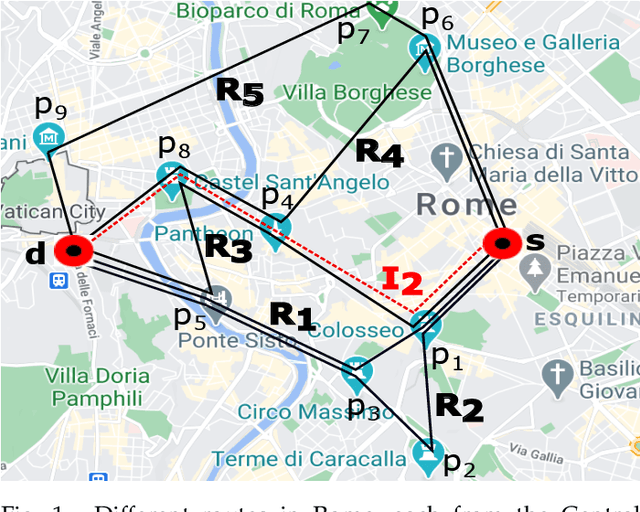
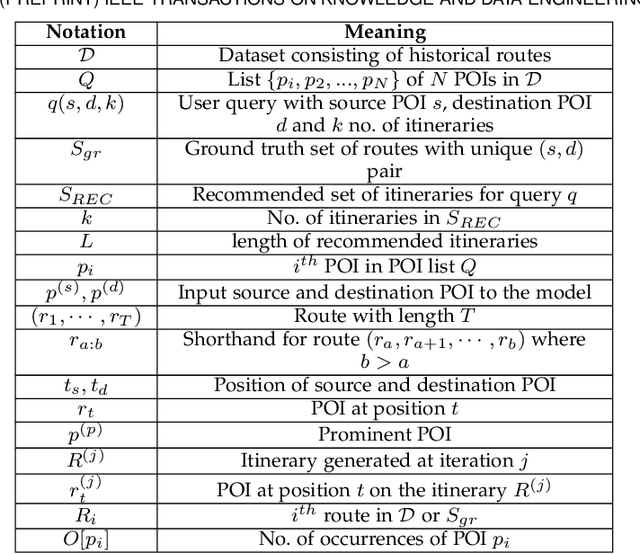
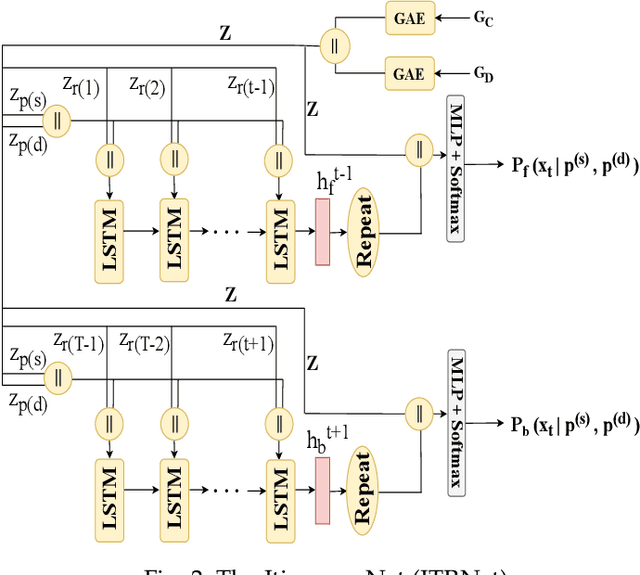
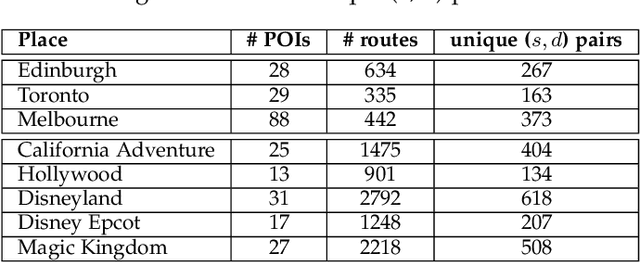
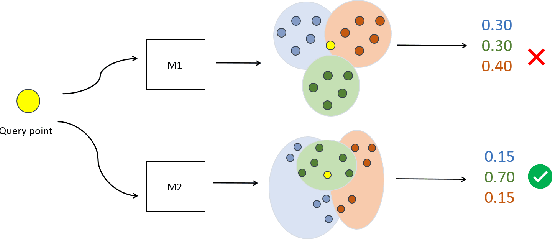
Trip itinerary recommendation finds an ordered sequence of Points-of-Interest (POIs) from a large number of candidate POIs in a city. In this paper, we propose a deep learning-based framework, called DeepAltTrip, that learns to recommend top-k alternative itineraries for given source and destination POIs. These alternative itineraries would be not only popular given the historical routes adopted by past users but also dissimilar (or diverse) to each other. The DeepAltTrip consists of two major components: (i) Itinerary Net (ITRNet) which estimates the likelihood of POIs on an itinerary by using graph autoencoders and two (forward and backward) LSTMs; and (ii) a route generation procedure to generate k diverse itineraries passing through relevant POIs obtained using ITRNet. For the route generation step, we propose a novel sampling algorithm that can seamlessly handle a wide variety of user-defined constraints. To the best of our knowledge, this is the first work that learns from historical trips to provide a set of alternative itineraries to the users. Extensive experiments conducted on eight popular real-world datasets show the effectiveness and efficacy of our approach over state-of-the-art methods.
CommuNety: A Deep Learning System for the Prediction of Cohesive Social Communities
Jul 29, 2020

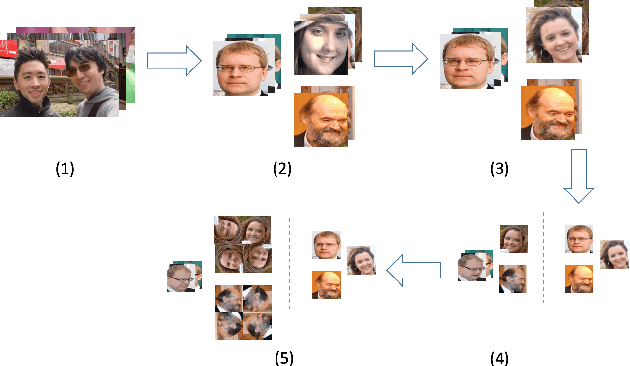
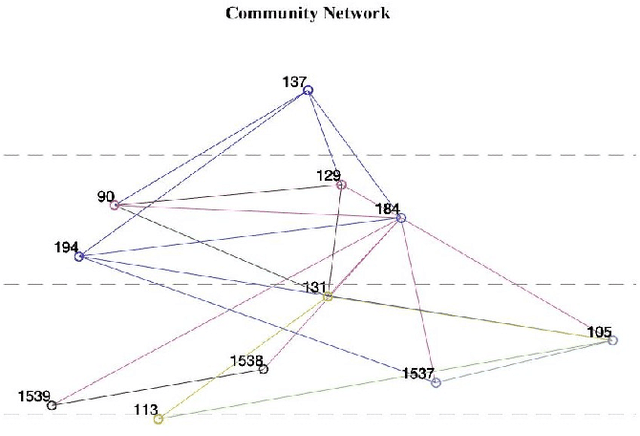
Effective mining of social media, which consists of a large number of users is a challenging task. Traditional approaches rely on the analysis of text data related to users to accomplish this task. However, text data lacks significant information about the social users and their associated groups. In this paper, we propose CommuNety, a deep learning system for the prediction of cohesive social networks using images. The proposed deep learning model consists of hierarchical CNN architecture to learn descriptive features related to each cohesive network. The paper also proposes a novel Face Co-occurrence Frequency algorithm to quantify existence of people in images, and a novel photo ranking method to analyze the strength of relationship between different individuals in a predicted social network. We extensively evaluate the proposed technique on PIPA dataset and compare with state-of-the-art methods. Our experimental results demonstrate the superior performance of the proposed technique for the prediction of relationship between different individuals and the cohesiveness of communities.
Comparing Alternative Route Planning Techniques: A Web-based Demonstration and User Study
Jun 15, 2020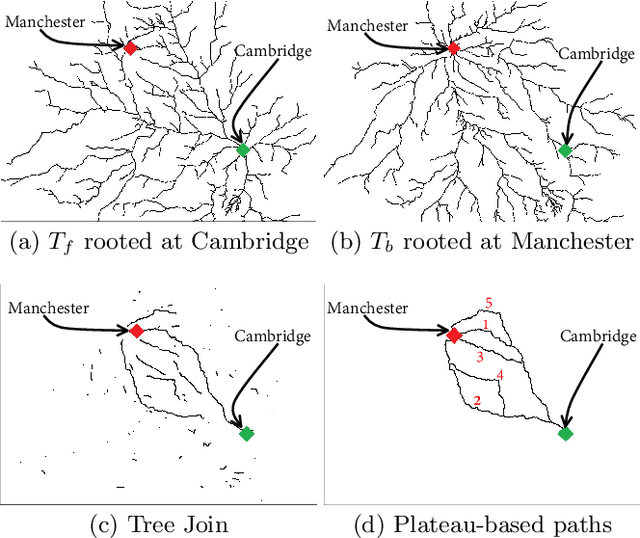

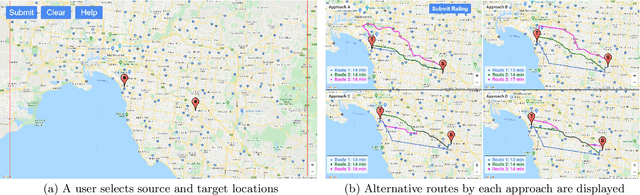
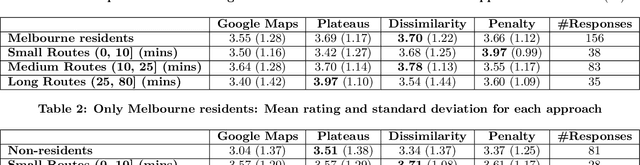
Due to the popularity of smartphones, cheap wireless networks and availability of road network data, navigation applications have become a part of our everyday life. Many modern navigation systems and map-based services do not only provide the fastest route from a source location s to a target location t but also provide a few alternative routes to the users as more options to choose from. Consequently, computing alternative paths from a source s to a target t has received significant research attention in the past few years. However, it is not clear which of the existing approaches generates alternative paths of better quality because the quality of these alternatives is mostly subjective. Motivated by this, in this paper, we present the first user study that compares the quality of the alternative routes generated by four of the most popular existing approaches including the routes provided by Google Maps. We also present the details of a web-based demo system that can be accessed using any internet enabled device and allows users to see the alternative routes generated by the four approaches for any pair of source and target selected by the users. Our user study shows that although the mean rating received by Google Maps is slightly lower than the mean ratings received by the other three approaches, the results are not statistically significant. We also discuss the limitations of this user study and recommend the readers to interpret these results with caution because certain factors beyond our control may have affected the participants' ratings.
An Efficient Approximation Algorithm for Multi-criteria Indoor Route Planning Queries
Sep 18, 2018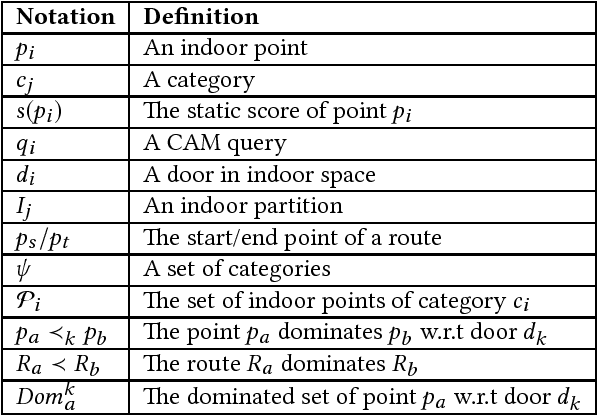
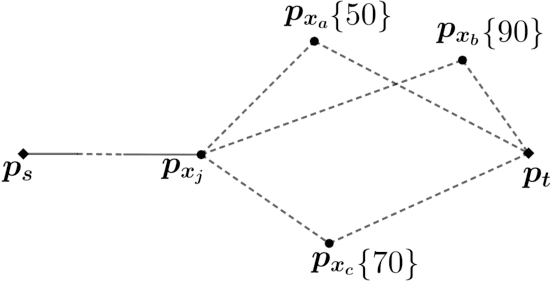
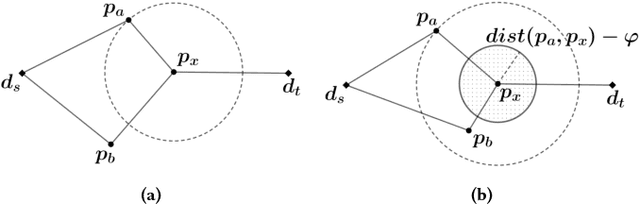
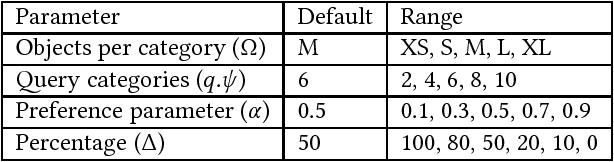
A route planning query has many real-world applications and has been studied extensively in outdoor spaces such as road networks or Euclidean space. Despite its many applications in indoor venues (e.g., shopping centres, libraries, airports), almost all existing studies are specifically designed for outdoor spaces and do not take into account unique properties of the indoor spaces such as hallways, stairs, escalators, rooms etc. We identify this research gap and formally define the problem of category aware multi-criteria route planning query, denoted by CAM, which returns the optimal route from an indoor source point to an indoor target point that passes through at least one indoor point from each given category while minimizing the total cost of the route in terms of travel distance and other relevant attributes. We show that CAM query is NP-hard. Based on a novel dominance-based pruning, we propose an efficient algorithm which generates high-quality results. We provide an extensive experimental study conducted on the largest shopping centre in Australia and compare our algorithm with alternative approaches. The experiments demonstrate that our algorithm is highly efficient and produces quality results.