 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMutualGraphNet: A novel model for motor imagery classification
Sep 02, 2021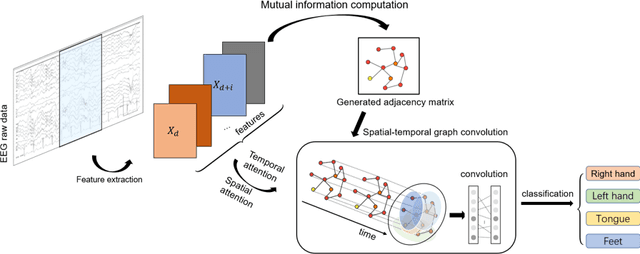
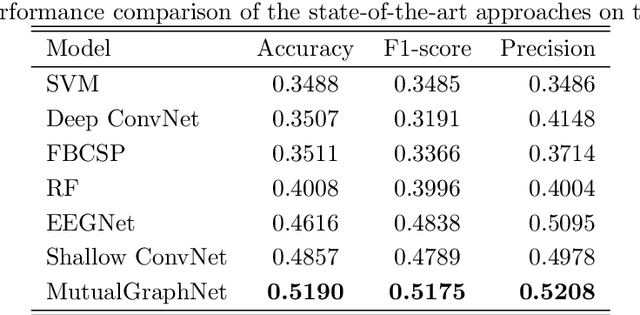
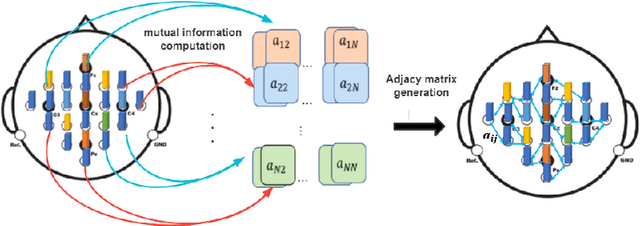
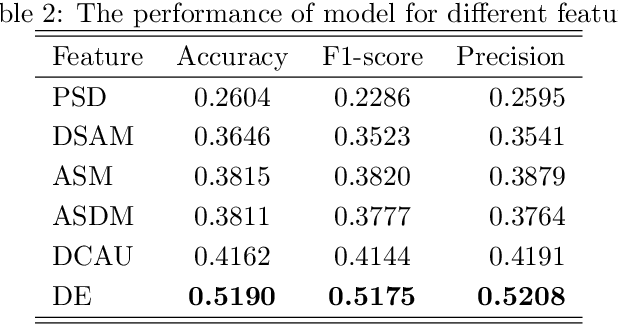
Motor imagery classification is of great significance to humans with mobility impairments, and how to extract and utilize the effective features from motor imagery electroencephalogram(EEG) channels has always been the focus of attention. There are many different methods for the motor imagery classification, but the limited understanding on human brain requires more effective methods for extracting the features of EEG data. Graph neural networks(GNNs) have demonstrated its effectiveness in classifying graph structures; and the use of GNN provides new possibilities for brain structure connection feature extraction. In this paper we propose a novel graph neural network based on the mutual information of the raw EEG channels called MutualGraphNet. We use the mutual information as the adjacency matrix combined with the spatial temporal graph convolution network(ST-GCN) could extract the transition rules of the motor imagery electroencephalogram(EEG) channels data more effectively. Experiments are conducted on motor imagery EEG data set and we compare our model with the current state-of-the-art approaches and the results suggest that MutualGraphNet is robust enough to learn the interpretable features and outperforms the current state-of-the-art methods.
An Efficient Approximation Algorithm for Multi-criteria Indoor Route Planning Queries
Sep 18, 2018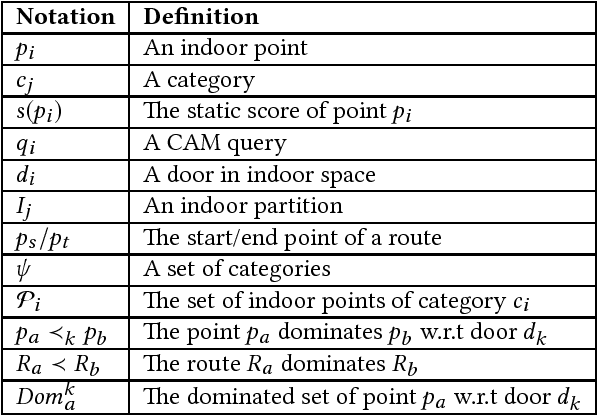
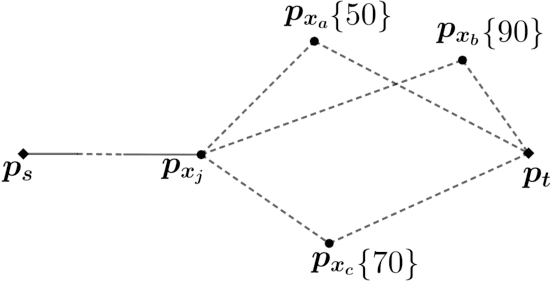
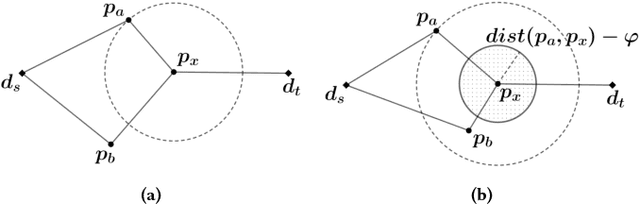
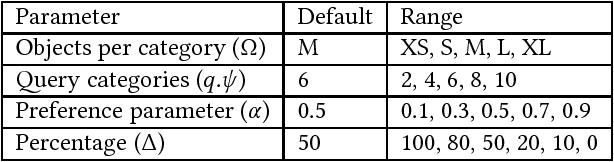
A route planning query has many real-world applications and has been studied extensively in outdoor spaces such as road networks or Euclidean space. Despite its many applications in indoor venues (e.g., shopping centres, libraries, airports), almost all existing studies are specifically designed for outdoor spaces and do not take into account unique properties of the indoor spaces such as hallways, stairs, escalators, rooms etc. We identify this research gap and formally define the problem of category aware multi-criteria route planning query, denoted by CAM, which returns the optimal route from an indoor source point to an indoor target point that passes through at least one indoor point from each given category while minimizing the total cost of the route in terms of travel distance and other relevant attributes. We show that CAM query is NP-hard. Based on a novel dominance-based pruning, we propose an efficient algorithm which generates high-quality results. We provide an extensive experimental study conducted on the largest shopping centre in Australia and compare our algorithm with alternative approaches. The experiments demonstrate that our algorithm is highly efficient and produces quality results.
Faster and More Robust Mesh-based Algorithms for Obstacle k-Nearest Neighbour
Aug 13, 2018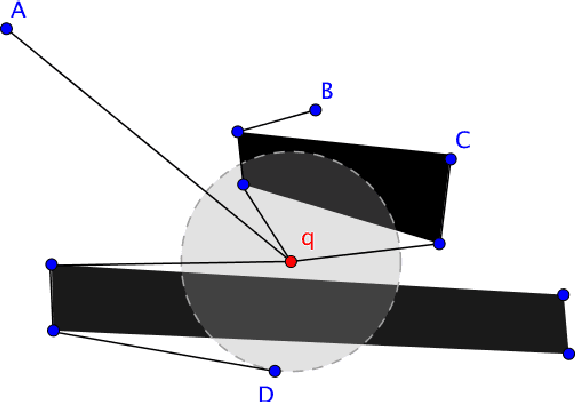
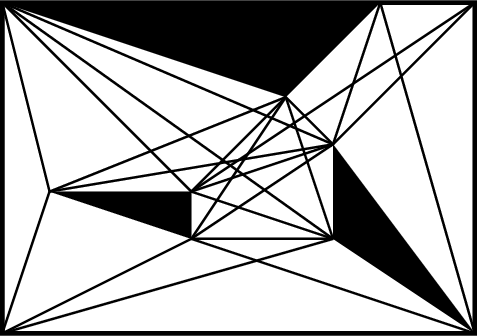
We are interested in the problem of finding $k$ nearest neighbours in the plane and in the presence of polygonal obstacles ($\textit{OkNN}$). Widely used algorithms for OkNN are based on incremental visibility graphs, which means they require costly and online visibility checking and have worst-case quadratic running time. Recently $\mathbf{Polyanya}$, a fast point-to-point pathfinding algorithm was proposed which avoids the disadvantages of visibility graphs by searching over an alternative data structure known as a navigation mesh. Previously, we adapted $\mathbf{Polyanya}$ to multi-target scenarios by developing two specialised heuristic functions: the $\mathbf{Interval heuristic}$ $h_v$ and the $\mathbf{Target heuristic}$ $h_t$. Though these methods outperform visibility graph algorithms by orders of magnitude in all our experiments they are not robust: $h_v$ expands many redundant nodes when the set of neighbours is small while $h_t$ performs poorly when the set of neighbours is large. In this paper, we propose new algorithms and heuristics for OkNN which perform well regardless of neighbour density.