 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNEUSIS: A Compositional Neuro-Symbolic Framework for Autonomous Perception, Reasoning, and Planning in Complex UAV Search Missions
Sep 16, 2024



This paper addresses the problem of autonomous UAV search missions, where a UAV must locate specific Entities of Interest (EOIs) within a time limit, based on brief descriptions in large, hazard-prone environments with keep-out zones. The UAV must perceive, reason, and make decisions with limited and uncertain information. We propose NEUSIS, a compositional neuro-symbolic system designed for interpretable UAV search and navigation in realistic scenarios. NEUSIS integrates neuro-symbolic visual perception, reasoning, and grounding (GRiD) to process raw sensory inputs, maintains a probabilistic world model for environment representation, and uses a hierarchical planning component (SNaC) for efficient path planning. Experimental results from simulated urban search missions using AirSim and Unreal Engine show that NEUSIS outperforms a state-of-the-art (SOTA) vision-language model and a SOTA search planning model in success rate, search efficiency, and 3D localization. These results demonstrate the effectiveness of our compositional neuro-symbolic approach in handling complex, real-world scenarios, making it a promising solution for autonomous UAV systems in search missions.
Multi-Target Search in Euclidean Space with Ray Shooting
Jul 06, 2022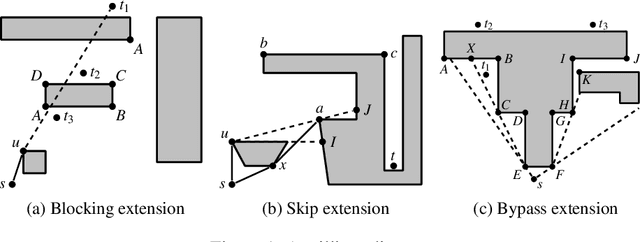
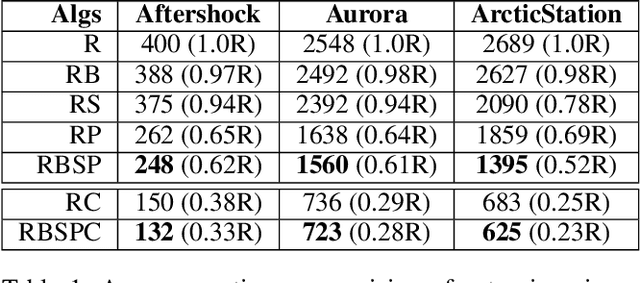
The Euclidean shortest path problem (ESPP) is a well studied problem with many practical applications. Recently a new efficient online approach to this problem, RayScan, has been developed, based on ray shooting and polygon scanning. In this paper we show how we can improve RayScan by carefully reasoning about polygon scans. We also look into how RayScan could be applied in the single-source multi-target scenario, where logic during scanning is used to reduce the number of rays shots required. This improvement also helps in the single target case. We compare the improved RayScan+ against the state-of-the-art ESPP algorithm, illustrating the situations where it is better.