 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassifying Bicycle Infrastructure Using On-Bike Street-Level Images
Oct 24, 2024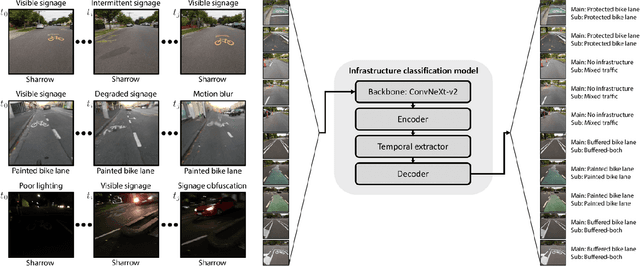
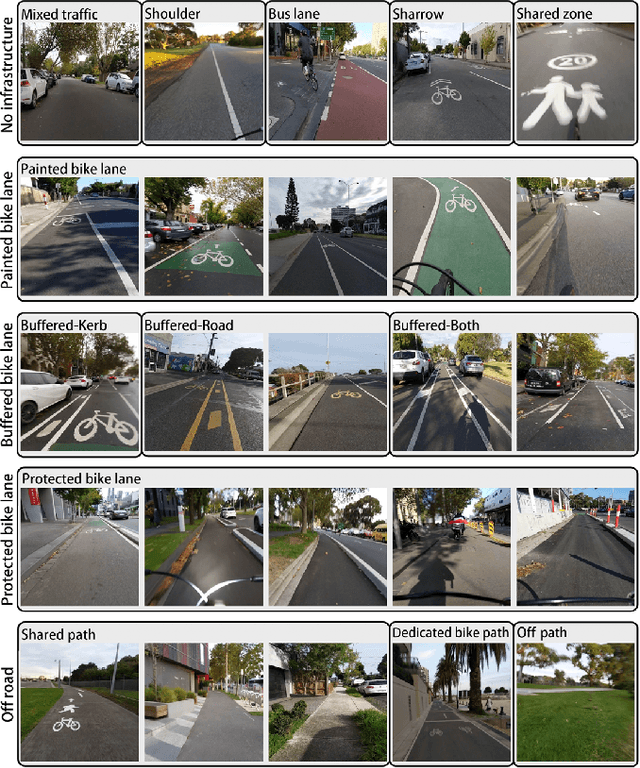

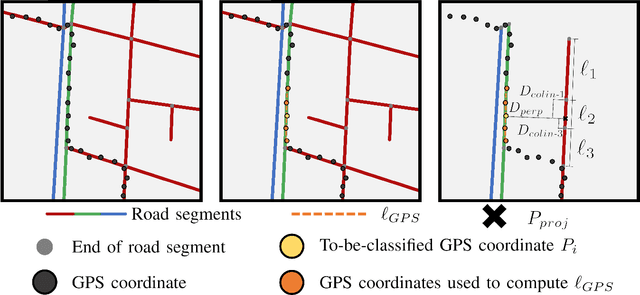
While cycling offers an attractive option for sustainable transportation, many potential cyclists are discouraged from taking up cycling due to the lack of suitable and safe infrastructure. Efficiently mapping cycling infrastructure across entire cities is necessary to advance our understanding of how to provide connected networks of high-quality infrastructure. Therefore we propose a system capable of classifying available cycling infrastructure from on-bike smartphone camera data. The system receives an image sequence as input, temporally analyzing the sequence to account for sparsity of signage. The model outputs cycling infrastructure class labels defined by a hierarchical classification system. Data is collected via participant cyclists covering 7,006Km across the Greater Melbourne region that is automatically labeled via a GPS and OpenStreetMap database matching algorithm. The proposed model achieved an accuracy of 95.38%, an increase in performance of 7.55% compared to the non-temporal model. The model demonstrated robustness to extreme absence of image features where the model lost only 6.6% in accuracy after 90% of images being replaced with blank images. This work is the first to classify cycling infrastructure using only street-level imagery collected from bike-mounted mobile phone cameras, while demonstrating robustness to feature sparsity via long temporal sequence analysis.
NEUSIS: A Compositional Neuro-Symbolic Framework for Autonomous Perception, Reasoning, and Planning in Complex UAV Search Missions
Sep 16, 2024



This paper addresses the problem of autonomous UAV search missions, where a UAV must locate specific Entities of Interest (EOIs) within a time limit, based on brief descriptions in large, hazard-prone environments with keep-out zones. The UAV must perceive, reason, and make decisions with limited and uncertain information. We propose NEUSIS, a compositional neuro-symbolic system designed for interpretable UAV search and navigation in realistic scenarios. NEUSIS integrates neuro-symbolic visual perception, reasoning, and grounding (GRiD) to process raw sensory inputs, maintains a probabilistic world model for environment representation, and uses a hierarchical planning component (SNaC) for efficient path planning. Experimental results from simulated urban search missions using AirSim and Unreal Engine show that NEUSIS outperforms a state-of-the-art (SOTA) vision-language model and a SOTA search planning model in success rate, search efficiency, and 3D localization. These results demonstrate the effectiveness of our compositional neuro-symbolic approach in handling complex, real-world scenarios, making it a promising solution for autonomous UAV systems in search missions.
Learning to Assist and Communicate with Novice Drone Pilots for Expert Level Performance
Jun 16, 2023



Multi-task missions for unmanned aerial vehicles (UAVs) involving inspection and landing tasks are challenging for novice pilots due to the difficulties associated with depth perception and the control interface. We propose a shared autonomy system, alongside supplementary information displays, to assist pilots to successfully complete multi-task missions without any pilot training. Our approach comprises of three modules: (1) a perception module that encodes visual information onto a latent representation, (2) a policy module that augments pilot's actions, and (3) an information augmentation module that provides additional information to the pilot. The policy module is trained in simulation with simulated users and transferred to the real world without modification in a user study (n=29), alongside supplementary information schemes including learnt red/green light feedback cues and an augmented reality display. The pilot's intent is unknown to the policy module and is inferred from the pilot's input and UAV's states. The assistant increased task success rate for the landing and inspection tasks from [16.67% & 54.29%] respectively to [95.59% & 96.22%]. With the assistant, inexperienced pilots achieved similar performance to experienced pilots. Red/green light feedback cues reduced the required time by 19.53% and trajectory length by 17.86% for the inspection task, where participants rated it as their preferred condition due to the intuitive interface and providing reassurance. This work demonstrates that simple user models can train shared autonomy systems in simulation, and transfer to physical tasks to estimate user intent and provide effective assistance and information to the pilot.
Reinforcement Learning for Shared Autonomy Drone Landings
Feb 07, 2022Novice pilots find it difficult to operate and land unmanned aerial vehicles (UAVs), due to the complex UAV dynamics, challenges in depth perception, lack of expertise with the control interface and additional disturbances from the ground effect. Therefore we propose a shared autonomy approach to assist pilots in safely landing a UAV under conditions where depth perception is difficult and safe landing zones are limited. Our approach comprises of two modules: a perception module that encodes information onto a compressed latent representation using two RGB-D cameras and a policy module that is trained with the reinforcement learning algorithm TD3 to discern the pilot's intent and to provide control inputs that augment the user's input to safely land the UAV. The policy module is trained in simulation using a population of simulated users. Simulated users are sampled from a parametric model with four parameters, which model a pilot's tendency to conform to the assistant, proficiency, aggressiveness and speed. We conduct a user study (n = 28) where human participants were tasked with landing a physical UAV on one of several platforms under challenging viewing conditions. The assistant, trained with only simulated user data, improved task success rate from 51.4% to 98.2% despite being unaware of the human participants' goal or the structure of the environment a priori. With the proposed assistant, regardless of prior piloting experience, participants performed with a proficiency greater than the most experienced unassisted participants.
Learning to Assist Drone Landings
Nov 26, 2020



Unmanned aerial vehicles (UAVs) are often used for navigating dangerous terrains, however they are difficult to pilot. Due to complex input-output mapping schemes, limited perception, the complex system dynamics and the need to maintain a safe operation distance, novice pilots experience difficulties in performing safe landings in obstacle filled environments. Previous work has proposed autonomous landing methods however these approaches do not adapt to the pilot's control inputs and require the pilot's goal to be known a priori. In this work we propose a shared autonomy approach that assists novice pilots to perform safe landings on one of several elevated platforms at a proficiency equal to or greater than experienced pilots. Our approach consists of two modules, a perceptual module and a policy module. The perceptual module compresses high dimensionality RGB-D images into a latent vector trained with a cross-modal variational auto-encoder. The policy module provides assistive control inputs trained with the reinforcement algorithm TD3. We conduct a user study (n=33) where participants land a simulated drone on a specified platform out of five candidate platforms with and without the use of the assistant. Despite the goal platform not being known to the assistant, participants of all skill levels were able to outperform experienced participants while assisted in the task.